

引言
第一部分:ROS 环境搭建
第二部分:RT-Thread rosserial 软件包
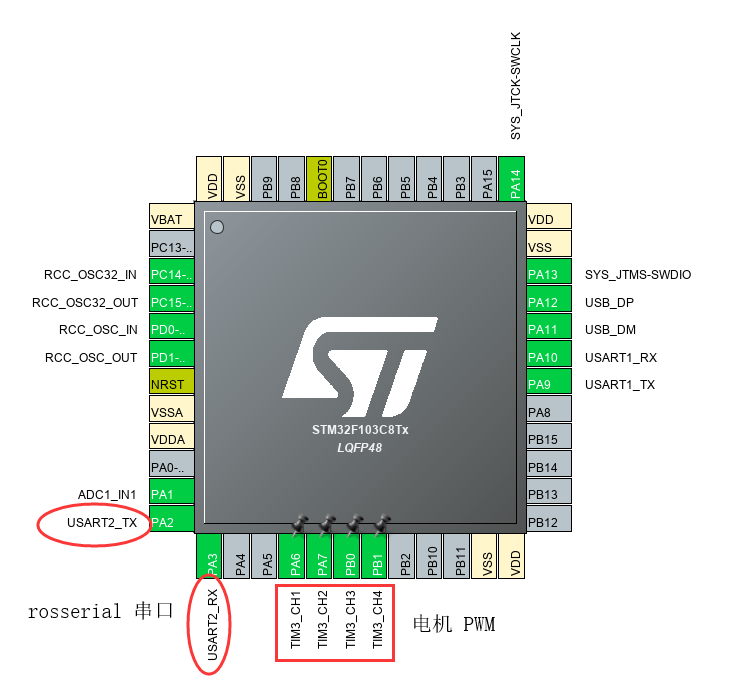
第二部分:RT-Thread 添加 USART2 和 PWM
第三部分:RT-Thread 使用 ESP8266 AT 固件联网
这里先介绍一下什么是 ROS?为什么要和 ROS 连接?

图片来源网络,如有侵权请联系删除
这篇文章假定大家都已经会用 RT-Thread 的 env 工具下载软件包,生成项目上传固件到 stm32 上,并且熟悉 Ubuntu 的基本使用。
这里的开发环境搭建其实是需要搭建 2 份,一份是小车上的 ARM 开发板 (树莓派,NanoPi 什么的),另一个则是自己的电脑,因为我们希望把电脑作为 ROS 从节点,连接到小车上的 ROS 主节点,不过开发板和电脑的 ROS 安装是一模一样的。
1sudo sh -c 'echo "deb https://mirror.tuna.tsinghua.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3sudo apt update
4sudo apt install ros-melodic-ros-base
1sudo rosdep init
2rosdep update
3
4echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
5source ~/.bashrc
1roscore
在 tmux 里启动了 ROS 主节点后,我们就可以 Ctrl + B D 退出了,而 ROS 主节点依旧在后台运行。

1menuconfig BSP_USING_UART
2 bool "Enable UART"
3 default y
4 select RT_USING_SERIAL
5 if BSP_USING_UART
6 config BSP_USING_UART1
7 bool "Enable UART1"
8 default y
9
10 config BSP_UART1_RX_USING_DMA
11 bool "Enable UART1 RX DMA"
12 depends on BSP_USING_UART1 && RT_SERIAL_USING_DMA
13 default n
14
15 config BSP_USING_UART2
16 bool "Enable UART2"
17 default y
18
19 config BSP_UART2_RX_USING_DMA
20 bool "Enable UART2 RX DMA"
21 depends on BSP_USING_UART2 && RT_SERIAL_USING_DMA
22 default n
23 endif
1menuconfig BSP_USING_PWM
2 bool "Enable pwm"
3 default n
4 select RT_USING_PWM
5 if BSP_USING_PWM
6 menuconfig BSP_USING_PWM3
7 bool "Enable timer3 output pwm"
8 default n
9 if BSP_USING_PWM3
10 config BSP_USING_PWM3_CH1
11 bool "Enable PWM3 channel1"
12 default n
13 config BSP_USING_PWM3_CH2
14 bool "Enable PWM3 channel2"
15 default n
16 config BSP_USING_PWM3_CH3
17 bool "Enable PWM3 channel3"
18 default n
19 config BSP_USING_PWM3_CH4
20 bool "Enable PWM3 channel4"
21 default n
22 endif
23 endif
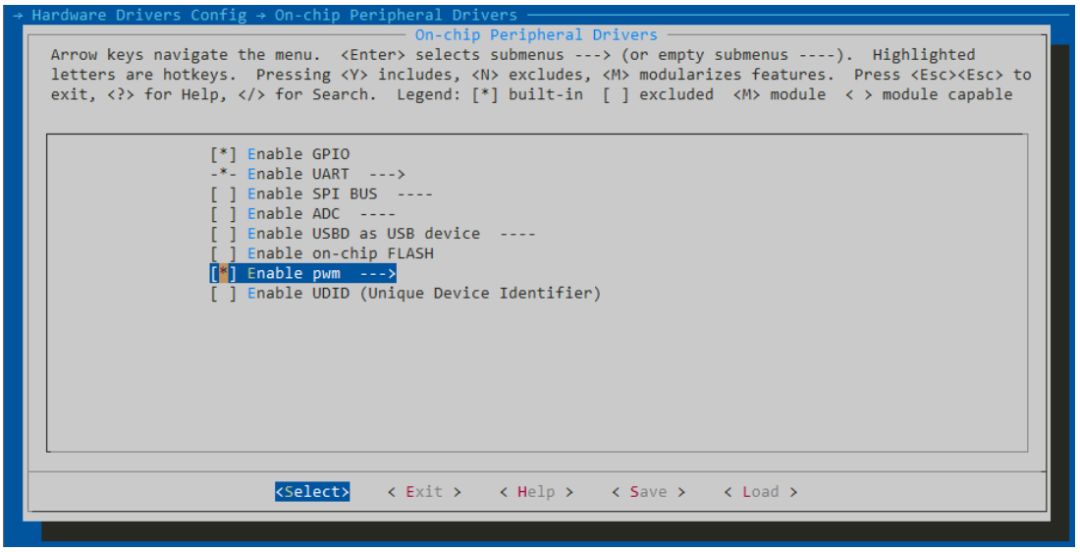
这样我们在 env 下就可以看到有对应的配置了,
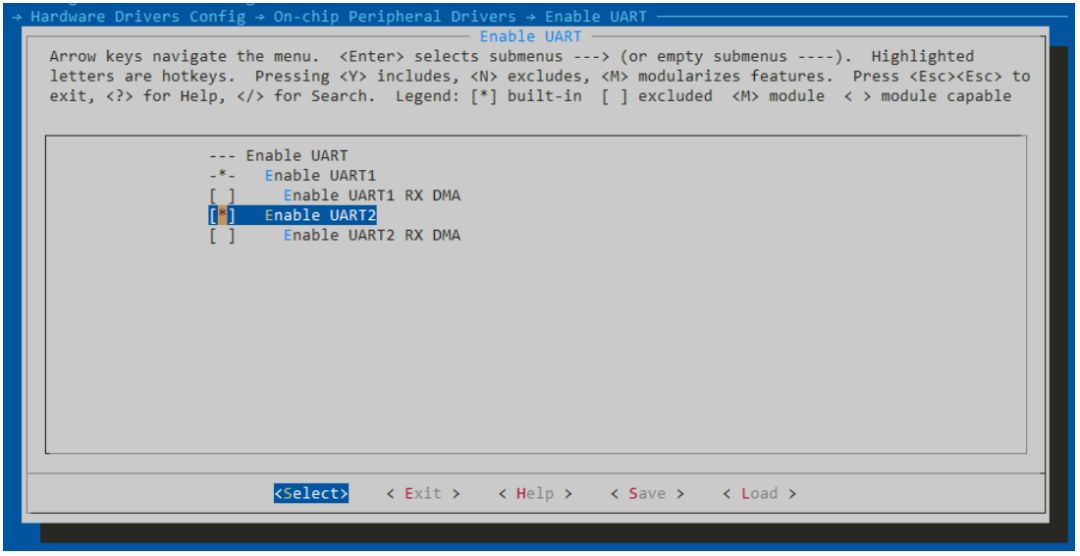
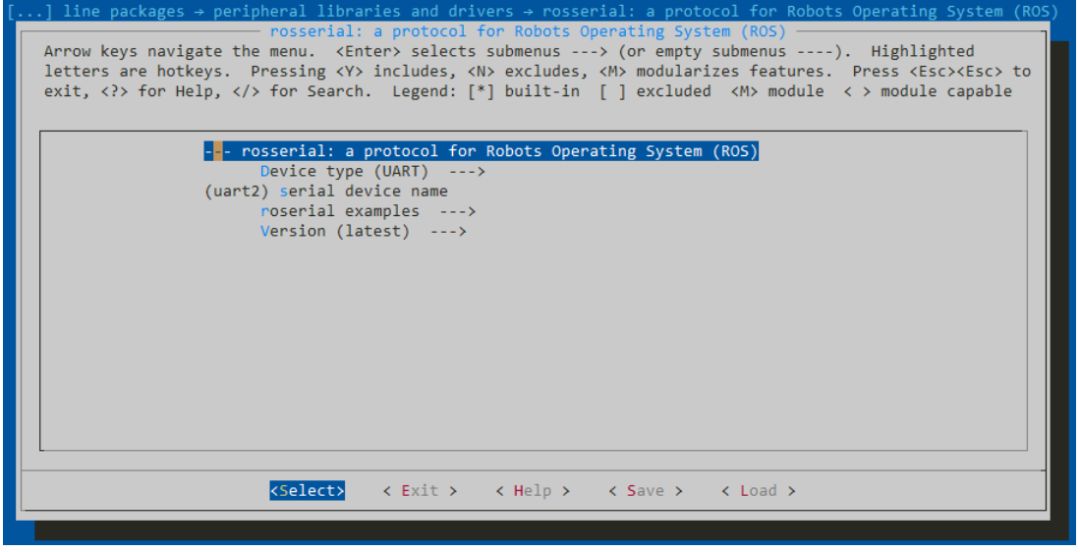
可以看到上面默认的串口就是 USART2,这样我们就可以生成对应的工程了:
1pkgs --update
2scons --target=mdk5 -s
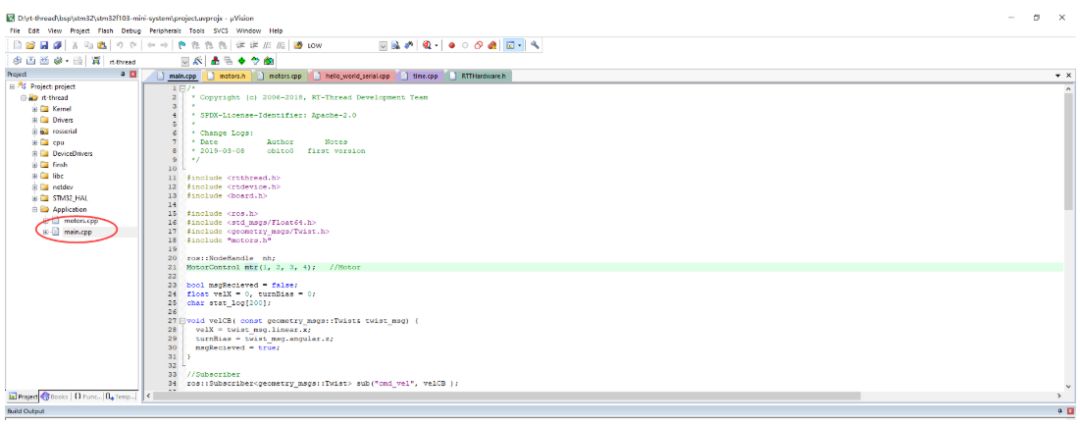
1#include <rtthread.h>
2#include <rtdevice.h>
3#include <board.h>
4
5#include <ros.h>
6#include <std_msgs/Float64.h>
7#include <geometry_msgs/Twist.h>
8#include "motors.h"
9
10ros::NodeHandle nh;
11MotorControl mtr(1, 2, 3, 4); //Motor
12
13bool msgRecieved = false;
14float velX = 0, turnBias = 0;
15char stat_log[200];
16
17// 接收到命令时的回调函数
18void velCB( const geometry_msgs::Twist& twist_msg)
19{
20 velX = twist_msg.linear.x;
21 turnBias = twist_msg.angular.z;
22 msgRecieved = true;
23}
24
25//Subscriber
26ros::Subscriber<geometry_msgs::Twist> sub("cmd_vel", velCB );
27
28//Publisher
29std_msgs::Float64 velX_tmp;
30std_msgs::Float64 turnBias_tmp;
31ros::Publisher xv("vel_x", &velX_tmp);
32ros::Publisher xt("turn_bias", &turnBias_tmp);
33
34static void rosserial_thread_entry(void *parameter)
35{
36 //Init motors, specif>y the respective motor pins
37 mtr.initMotors();
38
39 //Init node>
40 nh.initNode();
41
42 // 订阅了一个话题 /cmd_vel 接收控制指令
43 nh.subscribe(sub);
44
45 // 发布了一个话题 /vel_x 告诉 ROS 小车速度
46 nh.advertise(xv);
47
48 // 发布了一个话题 /turn_bias 告诉 ROS 小车的旋转角速度
49 nh.advertise(xt);
50
51 mtr.stopMotors();
52
53 while (1)
54 {
55 // 如果接收到了控制指令
56 if (msgRecieved)
57 {
58 velX *= mtr.maxSpd;
59 mtr.moveBot(velX, turnBias);
60 msgRecieved = false;
61 }
62
63 velX_tmp.data = velX;
64 turnBias_tmp.data = turnBias/mtr.turnFactor;
65
66 // 更新话题内容
67 xv.publish( &velX_tmp );
68 xt.publish( &turnBias_tmp );
69
70 nh.spinOnce();
71 }
72}
73
74int main(void)
75{
76 // 启动一个线程用来和 ROS 通信
77 rt_thread_t thread = rt_thread_create("rosserial", rosserial_thread_entry, RT_NULL, 2048, 8, 10);
78 if(thread != RT_NULL)
79 {
80 rt_thread_startup(thread);
81 rt_kprintf("[rosserial] New thread rosserial\n");
82 }
83 else
84 {
85 rt_kprintf("[rosserial] Failed to create thread rosserial\n");
86 }
87 return RT_EOK;
88}
另外还有对应的电机控制的代码,不过这个大家的小车不同,驱动应当也不一样,我这里由于小车电机上没有编码器,所以全部是开环控制的。
1#include <rtthread.h>
2
3class MotorControl {
4 public:
5 //Var
6 rt_uint32_t maxSpd;
7 float moveFactor;
8 float turnFactor;
9
10 MotorControl(int fl_for, int fl_back,
11 int fr_for, int fr_back);
12 void initMotors();
13 void rotateBot(int dir, float spd);
14 void moveBot(float spd, float bias);
15 void stopMotors();
16 private:
17 struct rt_device_pwm *pwm_dev;
18 //The pins
19 int fl_for;
20 int fl_back;
21 int fr_for;
22 int fr_back;
23 int bl_for;
24 int bl_back;
25 int br_for;
26 int br_back;
27};
1#include <rtthread.h>
2#include <rtdevice.h>
3#include "motors.h"
4
5#define PWM_DEV_NAME "pwm3"
6
7MotorControl::MotorControl(int fl_for, int fl_back,
8 int fr_for, int fr_back)
9{
10 this->maxSpd = 500000;
11 this->moveFactor = 1.0;
12 this->turnFactor = 3.0;
13
14 this->fl_for = fl_for;
15 this->fl_back = fl_back;
16
17 this->fr_for = fr_for;
18 this->fr_back = fr_back;
19}
20
21void MotorControl::initMotors() {
22 /* 查找设备 */
23 this->pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
24 if (pwm_dev == RT_NULL)
25 {
26 rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);
27 }
28 rt_kprintf("pwm found %s device!\n", PWM_DEV_NAME);
29 rt_pwm_set(pwm_dev, fl_for, maxSpd, 0);
30 rt_pwm_enable(pwm_dev, fl_for);
31
32 rt_pwm_set(pwm_dev, fl_back, maxSpd, 0);
33 rt_pwm_enable(pwm_dev, fl_back);
34
35 rt_pwm_set(pwm_dev, fr_for, maxSpd, 0);
36 rt_pwm_enable(pwm_dev, fr_for);
37
38 rt_pwm_set(pwm_dev, fr_back, maxSpd, 0);
39 rt_pwm_enable(pwm_dev, fr_back);
40}
41
42// 小车运动
43void MotorControl::moveBot(float spd, float bias) {
44 float sL = spd * maxSpd;
45 float sR = spd * maxSpd;
46 int dir = (spd > 0) ? 1 : 0;
47
48 if(bias != 0)
49 {
50 rotateBot((bias > 0) ? 1 : 0, bias);
51 return;
52 }
53
54 if( sL < -moveFactor * maxSpd)
55 {
56 sL = -moveFactor * maxSpd;
57 }
58 if( sL > moveFactor * maxSpd)
59 {
60 sL = moveFactor * maxSpd;
61 }
62
63 if( sR < -moveFactor * maxSpd)
64 {
65 sR = -moveFactor * maxSpd;
66 }
67 if( sR > moveFactor * maxSpd)
68 {
69 sR = moveFactor * maxSpd;
70 }
71
72 if (sL < 0)
73 {
74 sL *= -1;
75 }
76
77 if (sR < 0)
78 {
79 sR *= -1;
80 }
81
82 rt_kprintf("Speed Left: %ld\n", (rt_int32_t)sL);
83 rt_kprintf("Speed Right: %ld\n", (rt_int32_t)sR);
84
85 if(dir)
86 {
87 rt_pwm_set(pwm_dev, fl_for, maxSpd, (rt_int32_t)sL);
88 rt_pwm_set(pwm_dev, fl_back, maxSpd, 0);
89 rt_pwm_set(pwm_dev, fr_for, maxSpd, (rt_int32_t)sR);
90 rt_pwm_set(pwm_dev, fr_back, maxSpd, 0);
91 }
92 else
93 {
94 rt_pwm_set(pwm_dev, fl_for, maxSpd, 0);
95 rt_pwm_set(pwm_dev, fl_back, maxSpd, (rt_int32_t)sL);
96 rt_pwm_set(pwm_dev, fr_for, maxSpd, 0);
97 rt_pwm_set(pwm_dev, fr_back, maxSpd, (rt_int32_t)sR);
98 }
99
100 rt_thread_mdelay(1);
101}
102
103
104// 小车旋转
105void MotorControl::rotateBot(int dir, float spd) {
106 float s = spd * maxSpd;
107 if (dir < 0)
108 {
109 s *= -1;
110 }
111 if(dir)
112 {
113 // Clockwise
114 rt_pwm_set(pwm_dev, fl_for, maxSpd, (rt_int32_t)s);
115 rt_pwm_set(pwm_dev, fl_back, maxSpd, 0);
116 rt_pwm_set(pwm_dev, fr_for, maxSpd, 0);
117 rt_pwm_set(pwm_dev, fr_back, maxSpd, (rt_int32_t)s);
118 }
119 else
120 {
121 // Counter Clockwise
122 rt_pwm_set(pwm_dev, fl_for, maxSpd, 0);
123 rt_pwm_set(pwm_dev, fl_back, maxSpd, (rt_int32_t)s);
124 rt_pwm_set(pwm_dev, fr_for, maxSpd, (rt_int32_t)s);
125 rt_pwm_set(pwm_dev, fr_back, maxSpd, 0);
126 }
127 rt_thread_mdelay(1);
128}
129
130//Turn off both motors
131void MotorControl::stopMotors()
132{
133 rt_pwm_set(pwm_dev, fl_for, maxSpd, 0);
134 rt_pwm_set(pwm_dev, fl_back, maxSpd, 0);
135 rt_pwm_set(pwm_dev, fr_for, maxSpd, 0);
136 rt_pwm_set(pwm_dev, fr_back, maxSpd, 0);
137}
1$ rosrun rosserial_python serial_node.py /dev/ttyUSB0
1tpl@nanopineoplus2:~$ rosrun rosserial_python serial_node.py /dev/ttyUSB0
2[INFO] [1567239474.258919]: ROS Serial Python Node
3[INFO] [1567239474.288435]: Connecting to /dev/ttyUSB0 at 57600 baud
4[INFO] [1567239476.425646]: Requesting topics...
5[INFO] [1567239476.464336]: Note: publish buffer size is 512 bytes
6[INFO] [1567239476.471349]: Setup publisher on vel_x [std_msgs/Float64]
7[INFO] [1567239476.489881]: Setup publisher on turn_bias [std_msgs/Float64]
8[INFO] [1567239476.777573]: Note: subscribe buffer size is 512 bytes
9[INFO] [1567239476.785032]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
1$ mkdir catkin_workspace && cd catkin_workspace
2$ catkin_init_workspace
1$ cd src
2$ catkin_create_pkg my_first_pkg rospy
1#!/usr/bin/python
2
3import rospy
4from geometry_msgs.msg import Twist
5from pynput.keyboard import Key, Listener
6
7vel = Twist()
8vel.linear.x = 0
9
10def on_press(key):
11
12 try:
13 if(key.char == 'w'):
14 print("Forward")
15 vel.linear.x = 0.8
16 vel.angular.z = 0
17
18 if(key.char == 's'):
19 print("Backward")
20 vel.linear.x = -0.8
21 vel.angular.z = 0
22
23 if(key.char == 'a'):
24 print("Counter Clockwise")
25 vel.linear.x = 0
26 vel.angular.z = -0.8
27
28 if(key.char == 'd'):
29 print("Clockwise")
30 vel.linear.x = 0
31 vel.angular.z = 0.8
32
33 return False
34
35 except AttributeError:
36 print('special key {0} pressed'.format(key))
37 return False
38
39def on_release(key):
40 vel.linear.x = 0
41 vel.angular.z = 0
42
43 return False
44
45# Init Node
46rospy.init_node('my_cmd_vel_publisher')
47pub = rospy.Publisher('cmd_vel', Twist, queue_size=10)
48
49# Set rate
50rate = rospy.Rate(10)
51
52listener = Listener(on_release=on_release, on_press = on_press)
53
54while not rospy.is_shutdown():
55 print(vel.linear.x)
56 pub.publish(vel)
57 vel.linear.x = 0
58 vel.angular.z = 0
59 rate.sleep()
60
61 if not listener.running:
62 listener = Listener(on_release=on_release, on_press = on_press)
63 listener.start()
1$ chmod u+x ./ros_cmd_vel_pub.py
这样就可以编译软件包了,在 catkin_worspace 目录下。
1$ catkin_make
2$ source devel/setup.bash
1rosrun my_first_pkg ros_cmd_vel_pub.py
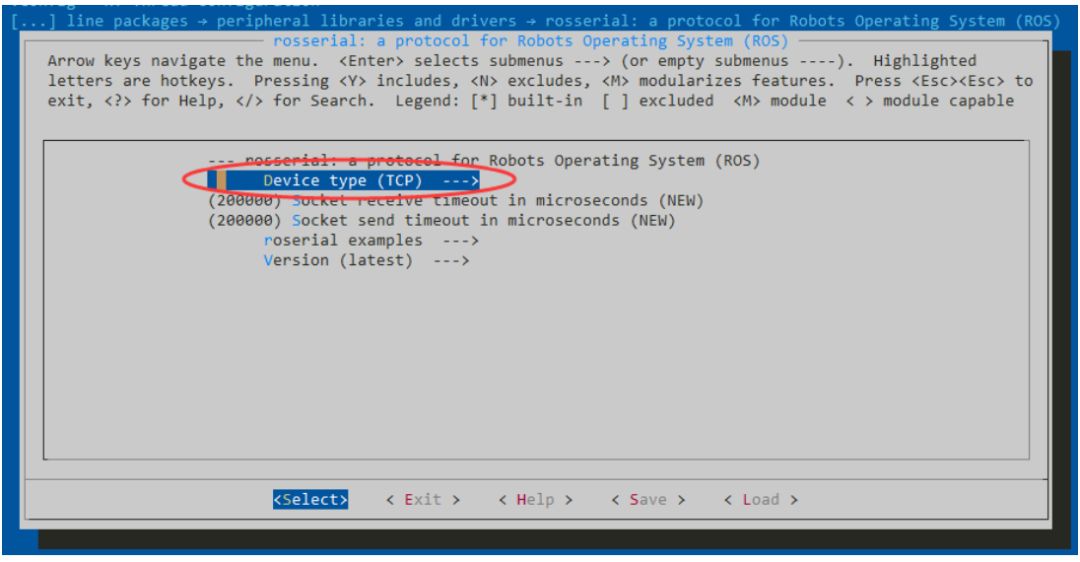
我们只需要在上一部分的 main.cpp 里添加一行代码:
1// 设置 ROS 的 IP 端口号
2nh.getHardware()->setConnection("192.168.1.210", 11411);
3
4// 添加在节点初始化之前
5nh.initNode();
1$ rosrun rosserial_python serial_node.py tcp
其他的代码完全不需要改变,这样我们就实现了一个 ROS 无线控制的小车了。
RT-Thread 使用 ESP8266 上网:
https://www.rt-thread.org/document/site/application-note/components/at/an0014-at-client/

1.2020年第5期《单片机与嵌入式系统应用》电子刊新鲜出炉!
2.为什么星链和5G是互补共荣,互相不能替代的两个大项目?
3.嵌入式系统:大数据和行业应用之间的桥梁
4.ARM的免费IP战略,能否撼动RISC-V的根基?
5.解读工信部25号文:蜂窝网包打物联网,LoRa真要凉凉了?
6.说说两个冷门却又不冷门的预处理指令#pragma和#error!
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。
