关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯

【摘要】从汽车电动化、智能化、网联化、共享化的角度阐述了新型整车控制器关键技术需求,包括高计算性能、高通讯带宽、高功能安全性、软件持续更新。针对上述需求总结了以太网、CANFD、多核芯片、双核心、OTA关键技术行业现状,对未来发展趋势进行了展望。
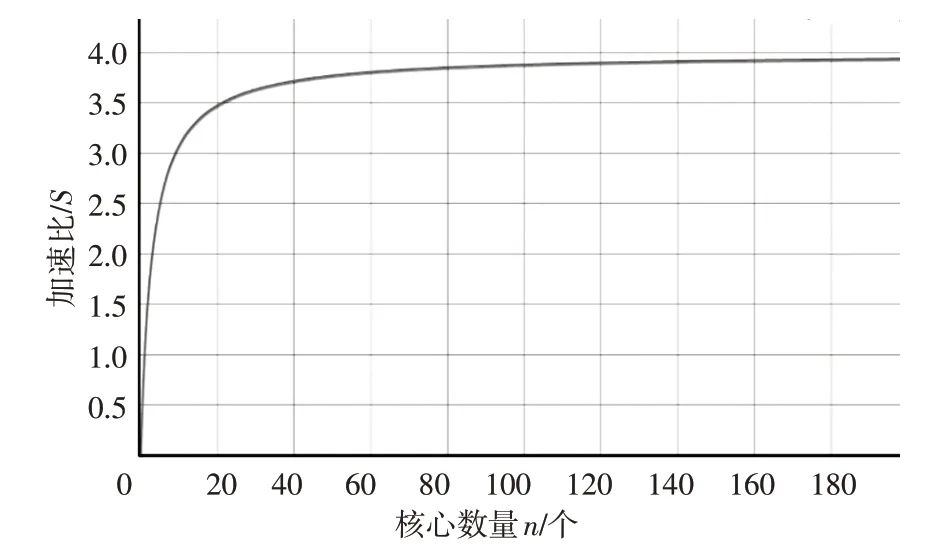
电动化、智能化、网联化和共享化是汽车产业公认的未来发展方向。作为电动汽车核心零部件,整车控制器必须能够支撑汽车“四化”。其必须满足高计算性能、高通信带宽、高功能安全性、软件持续更新等需求。目前整车电子电气架构及整车控制器所搭载技术普遍无法满足以上需求。为覆盖上述需求,未来汽车产品将逐渐采用集中式电子电气架构,同时整车控制器必须包含以太网、CANFD、多核芯片、双核心、OTA等关键技术。
本文将首先介绍整车控制器与分布式和集中式2种电子电气架构的关系,然后分别介绍了新型整车控制器的关键技术,对技术内容进行了分析,提出了未来发展趋势并进行了展望。
在以往的芯片能力前提下,受到计算能力及通信能力的限制,整车控制器无法集成所有的车辆控制软件,即使是新能源部件控制相关的软件也无法全部集成。这决定了整车控制器只能作为分布式电子电气架构中的一员,但是这种关系限制了功能变更及扩展。
在分布式电子电气架构中,一项整车层级的功能由多个控制器配合完成。某项功能的实现可能需要几个或十几个控制器相互配合,并且这些控制器可能分布在整车不同的网络中(图1)。整个交互过程与时间配合异常复杂。整车普遍有100余个控制器,几百项整车级功能,功能与控制器本身的物理连接交织成一个巨大而复杂的网,非常不利于模块化设计与扩展。在这种情况下,增加一个新功能,需要在上述的复杂功能网络上考虑各部分相关性,并对大量的控制器软件进行修改及测试。