2015年,一群神经科学家和工程师聚在一起看一名男子玩视频游戏《吉他英雄》。男子战战兢兢地拿起简化的吉他接口,用右手手指按下音品按钮,左手敲击琴弦。这个普通的游戏之所以变得如此非同寻常,是因为这名男子胸部以下瘫痪已经3年多了,手一直没有知觉。每移动手指弹奏一个音符,他都是在演奏一曲恢复自主能力的乐章。
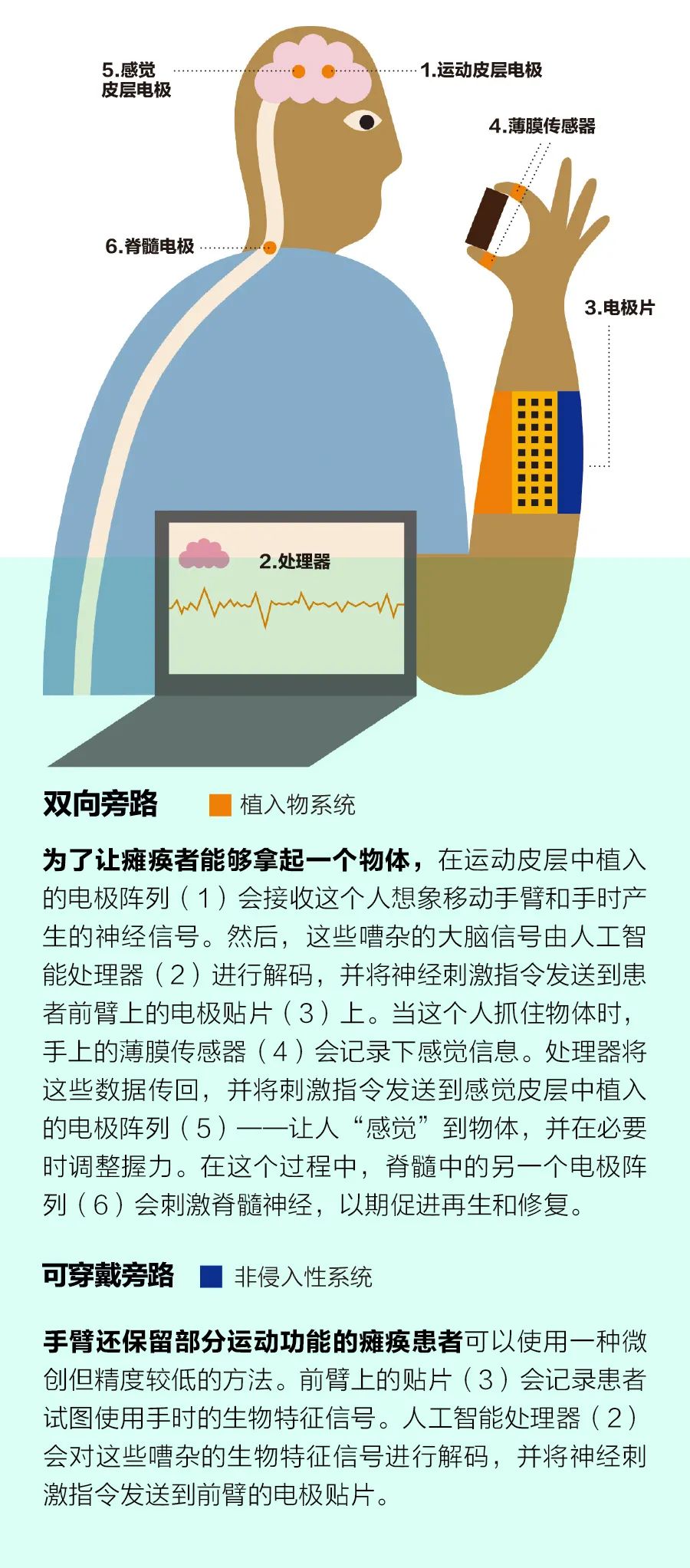
他的动作不是依靠他体内受损的脊髓发出指令完成的,而是使用了一种我们称之为“神经旁路”的技术,将他的意图转化为动作。首先,大脑植入物在他的运动皮层中接收神经信号,然后这些信号被重新路由到一台计算机上,计算机上运行的机器学习算法对这些信号进行解码;最后,包裹在他前臂上的电极将指令传递给肌肉。本质上,他使用了一种人工神经系统。
我们在美国俄亥俄州哥伦布的巴特尔纪念研究所进行了这项研究。后来我把实验室搬到了纽约曼哈塞特范斯坦医学研究所的生物电子医学研究所。生物电子医学是一个相对较新的领域,在这个领域里,我们用设备来读取和调制人体神经系统内的电活动,为病人开创了新疗法。我们研究团队的任务是破解与运动和感觉有关的神经密码,开发出新方法治疗全世界的瘫痪患者,仅在美国这一群体就有540万人。要做到这一点,我们首先要了解大脑神经元的电信号与身体动作的关系;然后要正确地用“讲”出相应的“语言”,并调制恰当的神经通路,恢复动作和触觉。在研究了这个问题20多年后,我觉得我们才刚刚开始对这个神秘代码的关键部分有了一些了解。我的团队成员,包括电气工程师尼肯•巴加特(Nikunj Bhagat)、神经科学家桑托什•钱德拉塞卡兰(Santosh Chandrasekaran)和临床主管理查德•拉姆迪奥(Richard Ramdeo)等,正在利用这些信息构建两种不同的人工神经系统。一种方法是用大脑植入物实现对瘫痪肢体的高保真控制;另一种采用非侵入性可穿戴技术,虽然提供的控制精度较低,但好处是不需要进行脑部手术,能较快地向患者推广。《吉他英雄》试验的参与者伊恩•伯克哈特(Ian Burkhart)在2010年在海浪中跳水时,头朝下撞到沙堤而造成瘫痪。撞击导致他颈部的几块椎骨骨折,脊髓受损,胸部中部以下瘫痪。他的损伤使大脑产生的电信号无法沿着神经传递和触发肌肉动作。在他参与我们的研究期间,我们用技术取代了他失去的功能。除了前文中的成就外,他还成功完成了刷信用卡和把瓶子里的水倒进杯子里的动作,首次成功实现了瘫痪患者用脑植入物控制自己的肌肉。除此之外,他和其他实验的参与者还为我们指明了两个研究方向。伯克哈特使用的系统还处于试验阶段,当研究结束时,他新获得的自主能力也将随之结束。我们打算改变这种状况。我们正在一项重点研究中开发一种非侵入性可穿戴技术,它不需要大脑植入物,可以很快在瘫痪群体中应用。正如我将在下文介绍的,四肢瘫痪人士已经在使用这个系统来触及和抓住各种物体。我们正在努力实现这种非侵入性技术的商业化,希望在明年获得美国食品药品监督管理局(FDA)的批准。这是我们的短期目标。我们工作的长期目标是实现一种双向神经旁路,用大脑植入物靠近信号源接收信号,并利用我们放置在肢体上的传感器进行反馈。我们希望这种双向系统能够恢复动作和感觉。我们已经开始一项临床试验来测试这种方法,希望像伯克哈特这样的患者能够用瘫痪的手演奏,感受吉他的振动。瘫痪曾被认为是一种不可改变的状态。但在过去的20年里,我们在读取大脑神经信号和使用电刺激瘫痪肌肉方面取得了显著进展。21世纪初,大脑之门(BrainGate)联盟开始了一项开创性的工作,用大脑植入物接收大脑运动区发出的信号,并利用这些信号控制各种机器。早年我有幸与该联盟合作,开发破译神经密码的机器学习算法。2007年,这些算法帮助一位因中风而瘫痪的女性通过意念控制轮椅。到了2012年,该团队帮助一名瘫痪女性用机械臂拿起瓶子。与此同时,其他研究人员还在使用植入电极刺激脊髓,使腿部瘫痪的患者能够站起来,甚至是行走。我们研究小组一直在解决这个问题的两方面:读取大脑信号以及刺激肌肉,主要以手为研究对象。在与BrainGate团队一起工作的时候,我记得自己曾看过一项关于脊髓受伤患者首要诉求的调查。四肢瘫痪者,也就是四肢全部瘫痪的人回答说,他们的首要诉求是恢复手臂和手的功能。机器人技术可部分满足这一需求。有一种商用机械臂可以与轮椅控制器一起操作,而且已有研究在探索通过大脑植入物或头皮电极来控制机械臂的可能性。但有些人仍然渴望使用自己的手臂。2016年,伯克哈特在接受媒体采访时表示,他不愿意在轮椅上安装机械臂,他觉得这太扎眼了。他说,用不引人注意的技术控制自己手臂,他“几乎可以作为一个正常的社会成员活动,而不会被当作一个半机械人”。恢复手部运动是一项艰巨挑战。人的手有20多个自由度,或者说它可以移动和旋转的方式,比腿要多得多。这意味着有许多需要刺激的肌肉,从而产生了一个非常复杂的控制系统问题。我们尚不能完全了解大脑是如何对所有复杂的手部动作进行编码的。尽管面临这些挑战,我们团队还是着手恢复四肢瘫痪者的手部功能。伯克哈特的植入物位于他的大脑运动皮层中,这个区域控制手部动作。研究人员已经广泛地绘制出运动皮层的图形,有大量关于运动皮层的一般神经元活动如何与整个手部以及每根手指运动关联的信息。从植入物的96块电极上获得的数据量是惊人的:每块电极每秒测量3万次活动。我们需要从这洪流般的数据中找出“弯曲拇指”或“伸出食指”的离散信号。
为了解码这些信号,我们将人工智能与人的持续重复运动相结合。为训练这个系统,我们忠实的志愿者每周参加培训3次,为期15周。在每次培训中,伯克哈特都要注视电脑屏幕上一只动画手的移动和手指弯曲,并想象自己做出同样的动作,与此同时,植入物会记录下他的神经元活动。随着时间的推移,机器学习算法会找出对应着拇指弯曲、食指伸展等的活动模式。一旦我们的神经旁路系统理解了这些信号,它就可以为伯克哈特的前臂肌肉产生一组电脉冲,从理论上说,即模拟大脑通过未受损的脊髓和神经发出的脉冲。但实际上,将伯克哈特的意念转化为肌肉运动需要另一轮紧张的训练和校准。我们花了无数个小时来刺激包裹在他前臂上的130块电极,以决定如何控制他的手腕、手和每根手指的肌肉。但我们还不能复制手能完成的所有动作,而且我们还不能控制小指。我们知道,必须开发出更好的系统。
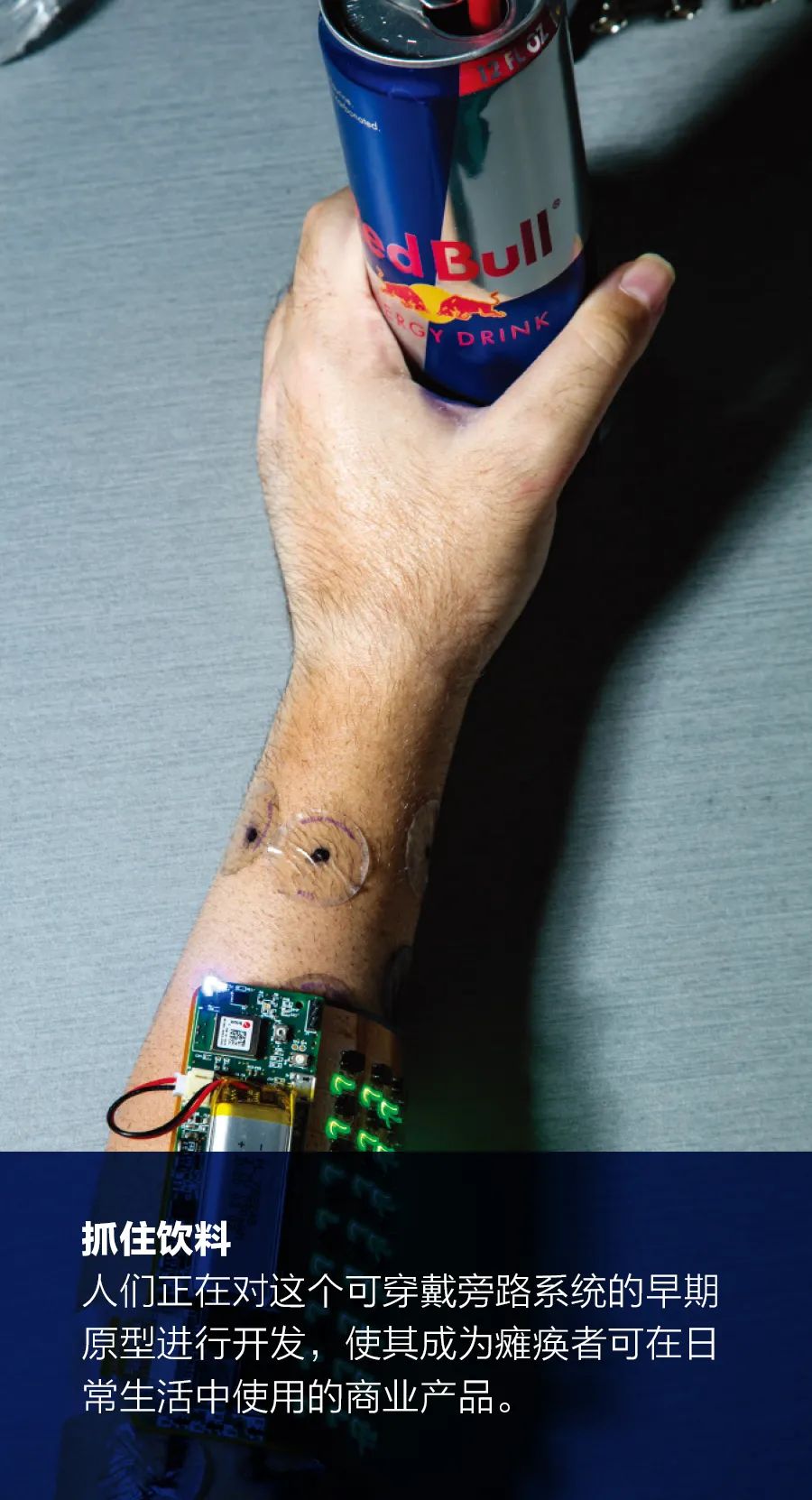
为了制作一个更实用、更方便的系统,我们决定开发一个完全无创的版本,称之为GlidePath。我们招募了一些有脊髓损伤但肩膀仍有一定活动能力的志愿者。我们在志愿者的手臂上放置了一种拥有特定组合的惯性传感器和生物计量传感器,并让他们想象伸手拿取不同的物体。传感器的数据馈送给了机器学习算法,使我们能够推断志愿者的抓取意图。然后他们前臂上的柔性电极按特定顺序刺激肌肉。在一次训练中,志愿者凯西•埃林(Casey Ellin)用这种可穿戴旁路设备从桌子上拿起了一根格兰诺拉麦片棒,并放到嘴里咬了一口。2020年我们将这些结果发表在《生物电子医学》(Bioelectronic Medicine)杂志上。
我们团队正在研究将传感器和刺激器集成到不显眼的轻便可穿戴设备中;我们还在开发一款与可穿戴设备配套的应用程序,以便临床医生可以检查和调整刺激设置。这种设置可以实现远程康复训练,因为应用程序中的数据将可上传到云端。为了加快刺激模式的校准进程,在健全和瘫痪志愿者的帮助下,我们建立一个手部运动映射模式数据库。虽然每个人对刺激的反应不同,但我们有足够的相似点来训练我们的系统。它类似于亚马逊的Alexa语音助手——接受过数千种语音的训练,随时可以使用,并且随着时间的推移,它会进一步改善对特定用户语音模式的理解。我们的可穿戴设备已做好立即投入使用的准备,提供手掌张开和握拳等基本功能。随着时间的推移,它们会继续学习了解用户的意图,帮助每位用户完成最重要的动作。我们认为这项技术可以帮助脊髓损伤患者以及中风康复患者。目前我们正在与好牧人康复医院(Good Shepherd Rehabilitation Hospital)和巴罗神经学研究所合作测试我们的技术。中风患者通常会接受神经肌肉电刺激,协助他们做出动作和帮助恢复运动功能。大量证据表明,如果病人在电极刺激某块肌肉时积极尝试做一个动作,康复的效果会更好;大脑和肌肉的齐心协力能提高“适应性”,即神经系统适应损伤的能力。我们的系统将确保患者积极参与,因为刺激是由患者的意念触发的。我们计划长时间地收集数据,我们希望看到患者最终能够恢复一些功能,即便是在技术装置关闭后。虽然可穿戴应用令人感到兴奋,但现今的非侵入性技术尚不能轻松控制复杂的手指运动,至少在最初是这样的。我们不指望GlidePath技术能立即使患者玩《吉他英雄》,更不用说弹奏真正的吉他。所以我们继续从事大脑植入物的神经旁路研究。
伯克哈特使用神经旁路早期版本时,他告诉我们这向自主运动迈出了一大步。但有很多实际情况我们没有考虑到。他告诉我们:“我感觉不到我拿着的东西,这种感觉很奇怪。”系衬衫扣这样的日常活动需要这种感官反馈。然后我们决定研究一种双向神经旁路,将大脑的动作指令传递给手,并将手的感觉反馈给大脑,在两个方向上都跳过受损的脊髓。为了让瘫痪的手重新获得感觉,我们知道不仅要在手上有精准调校的传感器,还要在大脑的感觉皮层区域进行物体植入。对于传感器,我们首先想象人的皮肤是怎样向大脑发送反馈的。当你拿起东西时,比如说一只装满咖啡的一次性杯子,压力会压迫下面的皮肤层。当你举起杯子时,皮肤会移动、拉伸和变形。我们开发的薄膜传感器可以检测杯子对皮肤的压力,以及举起杯子、重力把它向下拉时施加在皮肤上的剪切力(横向)。这种微妙的反馈至关重要,因为在这种情况下,恰当的运动范围非常小;如果把杯子捏得太紧,咖啡会洒你一身。我们的每一个传感器都有不同的尺度来检测最轻微的压力或剪切力。通过整合测量值,我们的系统可以准确地确定皮肤弯曲或拉伸的程度。处理器将把这些信息发送到感觉皮层中的植入物,使用户能够感觉到手中的杯子,并根据需要调整握紧的程度。
另一项挑战是找到刺激感觉皮层的确切位置。感觉皮层中接收手部输入的部分尚未能通过电极完全绘制出来,部分原因是因为处理指尖的区域藏在大脑中一个叫做中央沟的沟槽中。为了填补这处空白,我们与神经外科医生阿什•梅塔(Ashesh Mehta)、斯蒂芬•比克尔(Stephan Bickel)以及经历过癫痫活动图绘制流程的癫痫住院患者合作。我们用深度电极来刺激中央沟内的区域,并询问患者哪些地方有感觉。我们能引起手部具体部位的感觉,包括重要的指尖。这些知识为我们的下一步临床试验研究做好了准备。目前我们正在为这项研究招募四肢瘫痪的志愿者,我们团队的神经外科医生将在志愿者的感觉皮层植入3组电极,在运动皮层植入2组电极。刺激感觉皮层可能会给解释运动皮层神经信号的解码算法带来新的挑战,运动皮层就在感觉皮层的隔壁,我们接收到的电信号肯定会有一些变化,我们必须学会补偿这些变化。
我们还给这项研究增加了一个难度。除了刺激前臂肌肉和感觉皮层外,我们也要刺激脊髓。我们的推理如下:脊髓的复杂网络里有1000万个神经元。早期研究表明,即使在没有大脑指令的情况下,这些神经元也有一定的能力暂时指挥身体的动作。我们将让志愿者全神贯注于一个动作意念,在前臂电极的帮助下由身体完成这个动作,并接收手部传感器传来的反馈。如果我们在这个过程中刺激脊髓,相信我们可以提高其在网络内的适应性,加强脊髓内参与手部运动的神经元之间的联系。我们有可能会获得超出研究周期的恢复效果:我们的梦想是帮助脊髓受损者恢复双手的功能。我们希望有一天,为瘫痪患者提供的大脑植入物能够获批进行临床使用,使他们不仅仅能够玩《吉他英雄》。我们还希望看到他们用双手完成复杂的动作,比如系鞋带、在键盘上打字、弹奏钢琴等。我们希望帮助他们伸出手来与爱人握手,并感受到对方的触摸。我们希望帮他们恢复运动、感觉,并最终恢复他们的自主能力。免责声明:本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。