01 MIC并联使用
在博文 驻极体,PN结以及电子管相关问题[1] 有人提出一个问题: “两个驻极体麦克可以并联在一起吗?” 估计提出这个问题, 是为了解决多个音频信号源简单混合的问题。
对于MIC电路, 它实际上相当于带有一个内阻的信号源。 对于这两个信号源, 如果直接将输出连接在一起, 是可以形成两个信号的叠加的。 如果两个信号源是相干的, 叠化后的信号会出现不同频率幅度不同。 下面通过实验测试一下相关的结果。
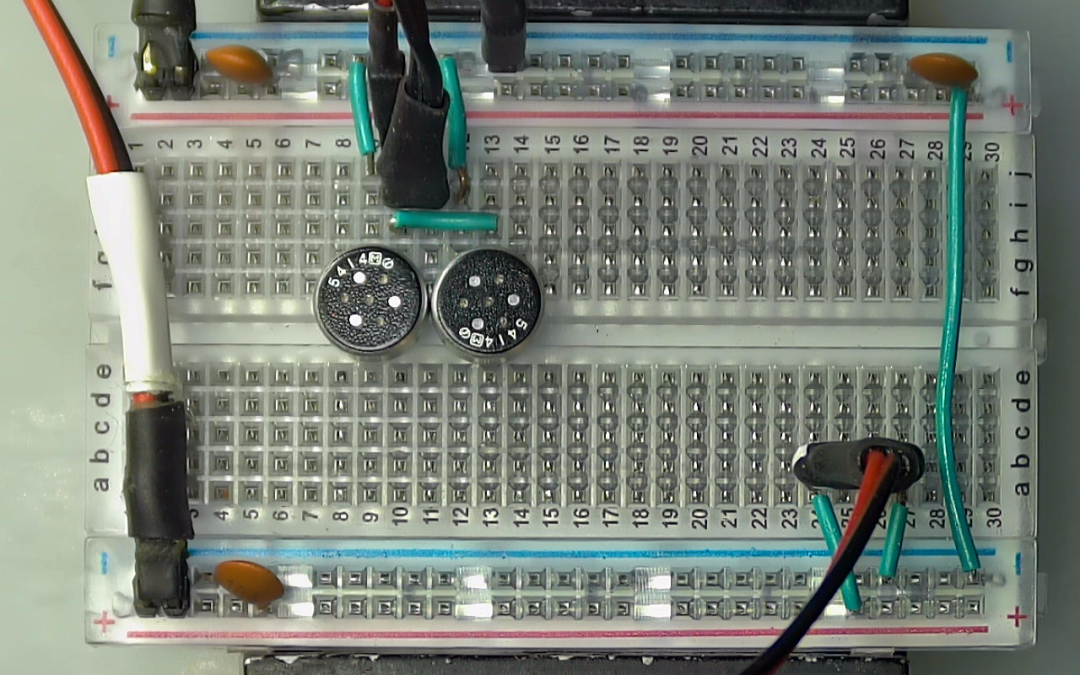
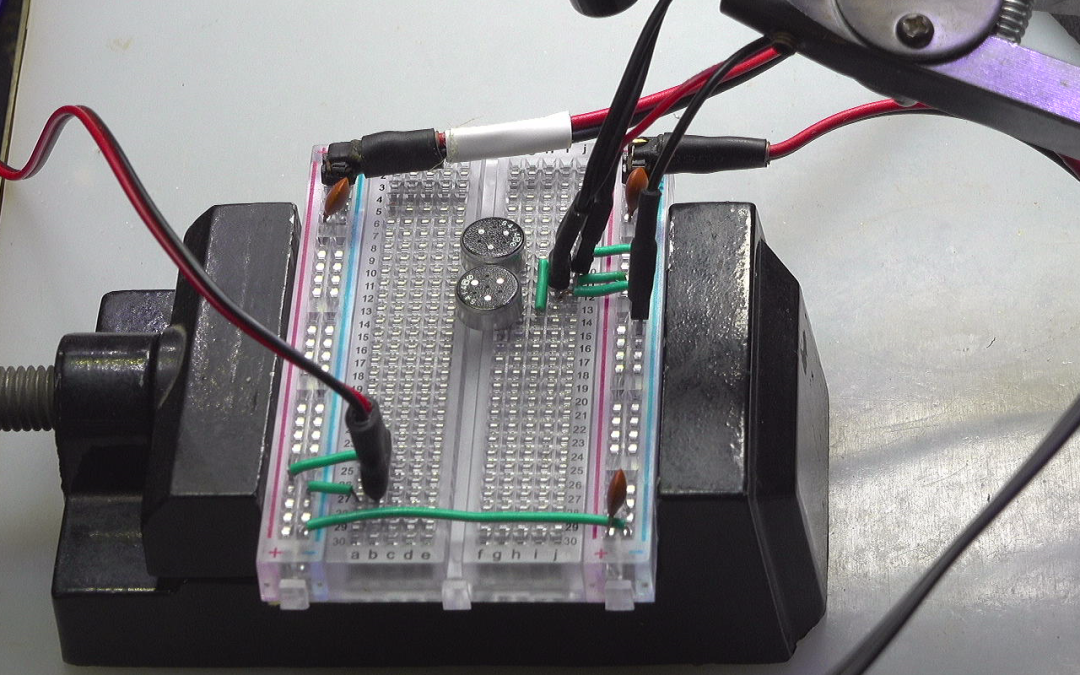
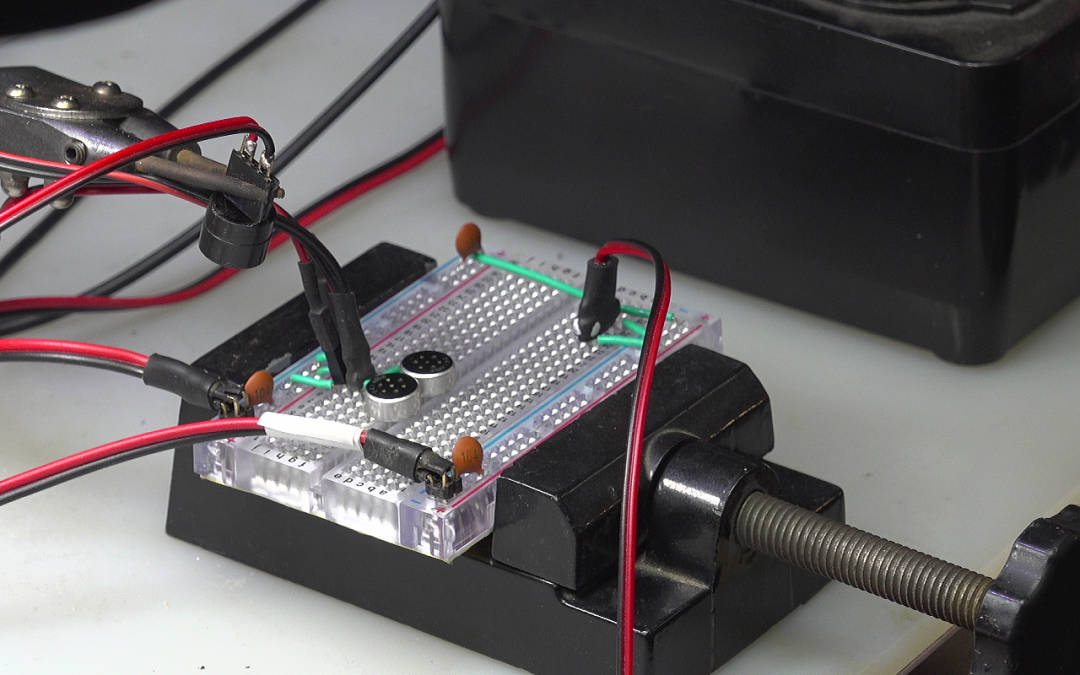
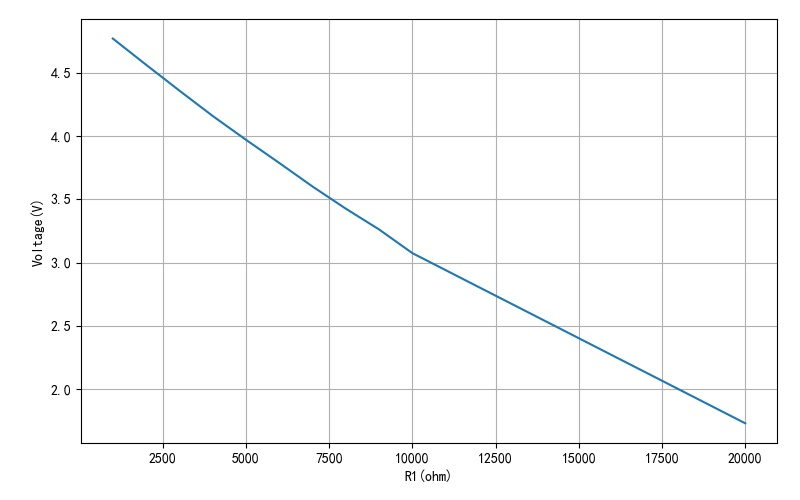
下面开始搭建测试电路, 这是搭建电路原理图,在MIC上串联一个上拉电阻R1到5V电源。 为了便于后面参数测量, 使用一个电阻箱作为R1, 这样可以方便调整R1的阻值。
通过调整R1不同的阻值,测量U1的偏置电压。 这是R1从1k变化到20看测量的数据。 根据偏置变化趋势, 可以推导出MIC偏置电压降落到电源电压一半时, 对应偏置电阻大约14k欧姆左右。
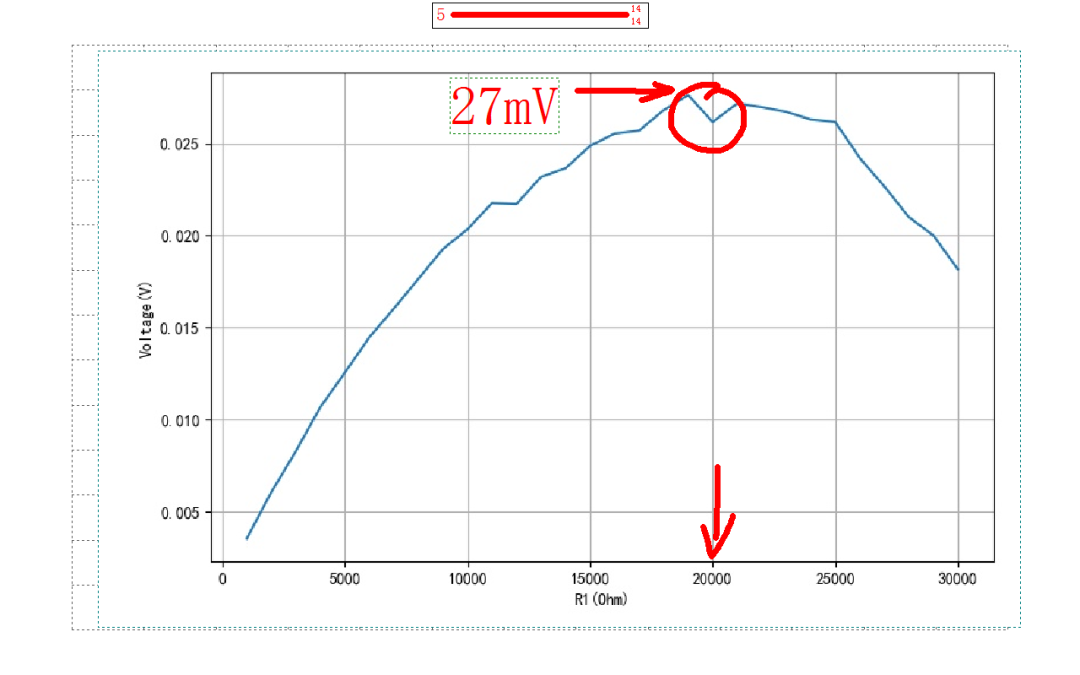
下面测量R1对于MIC输出信号的影响。 这是一个车蜂鸣器, 放置在MIC上方10厘米左右, 使用万用表测量此时MIC输出的交流信号。 这是MIC中的交流信号波形。 随着R1从1k变化到30k,输出信号从的变化趋势。 可以看到输出信号最大值, 出现在R1等于20k左右的时候, 此时输出信号大约为27mV。
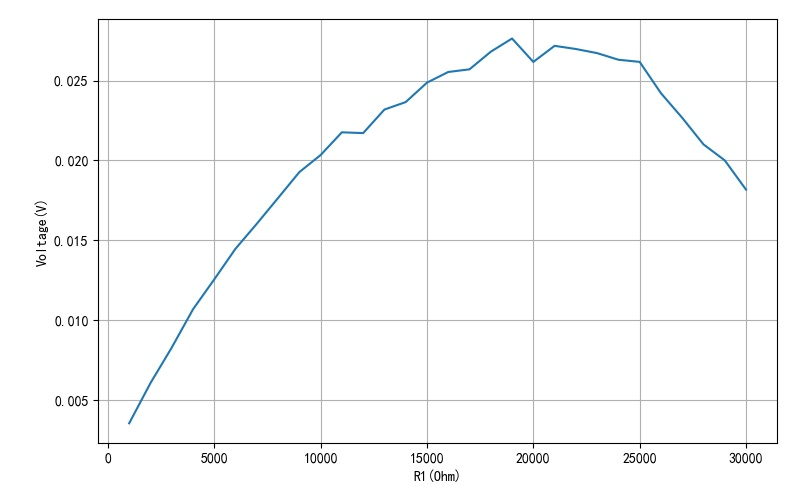
下面是电阻 R1 从 1k 变化到 30k 对应的输出信号的大小的数值。
0.003552 0.006067 0.008289 0.010685 0.012559 0.014479 0.016040 0.017652 0.019272 0.020340 0.021763 0.021713 0.023187 0.023655 0.024870 0.025538 0.025705 0.026807 0.027633 0.026168 0.027174 0.026976 0.026718 0.026305 0.026170 0.024211 0.022670 0.021006 0.020007 0.018176
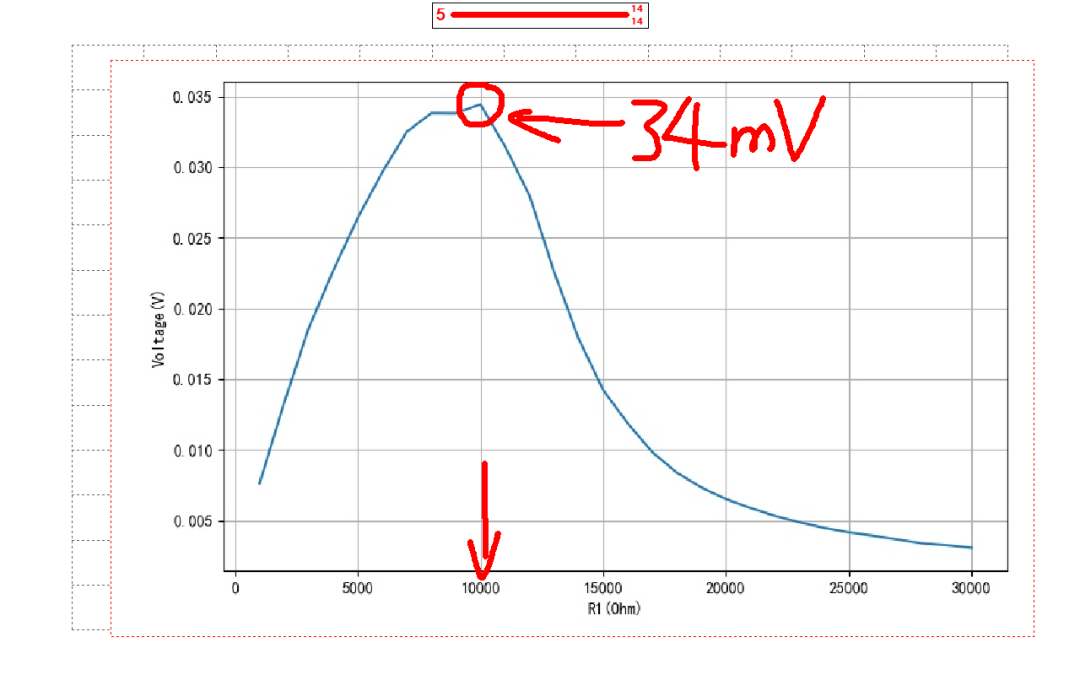
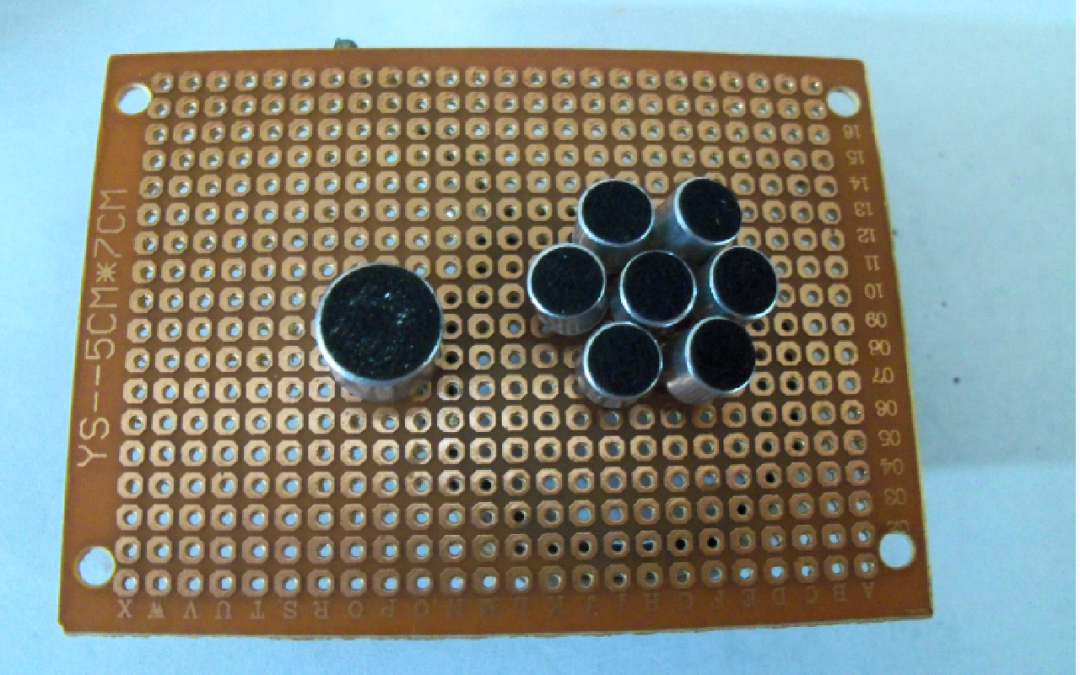
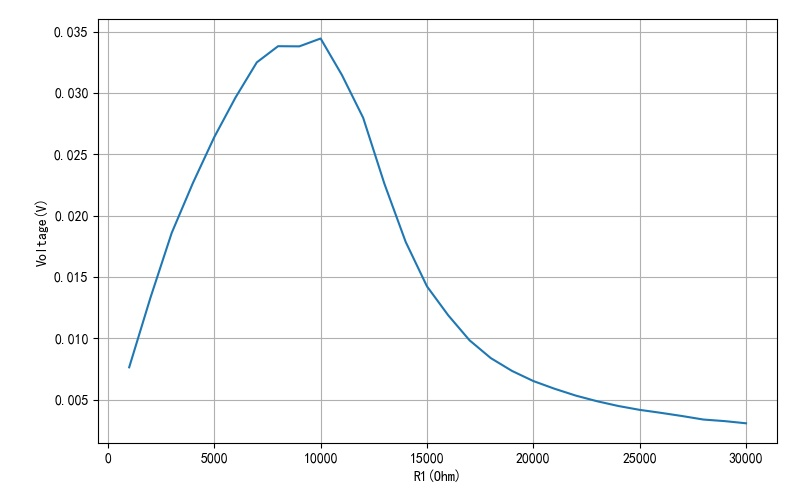
下面并联两个MIC进行测试。 它们的漏极并联在一起, 使用相同的测试电路测试对蜂鸣器信号的输出。 这是测量的结果。 可以看到输出信号最大时, 对应的R1在10k欧姆左右,这比单个MIC对应的最大信号输出时的R1小了一半。 输出信号的幅值也增加到34mV。 这说明利用两个MIC并联的确可以增加接收信号的幅值。
0.007626 0.013301 0.018587 0.022667 0.026391 0.029626 0.032488 0.033805 0.033792 0.034432 0.031461 0.027969 0.022585 0.017847 0.014226 0.011866 0.009831 0.008378 0.007330 0.006508 0.005878 0.005319 0.004860 0.004472 0.004158 0.003915 0.003653 0.003368 0.003240 0.003063
本文对于两个或者两个以上的MIC直接并联进行了测试, 通过实验可以看到, MIC输出信号的幅值与 外部偏置电阻有关系, 两个并联之后,上拉电阻也需要减半。 并联后的MIC灵敏度有所增加。
<<< 左右滑动见更多 >>>
18届智能车建议 :摄像头四轮组可以在三叉后倒着跑,在摄像头上加上舵机云台来改变摄像头的方向。