

关注+星标公众号,不错过精彩内容

作者 | ZhengNL
转自 | 嵌入式大杂烩
嵌入式开发中,常常会自定义一些协议格式,比如用于板与板之间的通信、客户端与服务端之间的通信等。
自定义的协议格式可能有很多种,本篇文章我们来介绍一种很常用、实用、且灵活性很高的协议格式——ITLV格式。
大家可能看到网络上的很多文章用的是TLV(Tag、Length、Value)格式数据。实际中,可以根据实际需要进行修改。我们这里稍微改一下,实际上也是大同小异的。
我们这里的ITLV各字段的含义:
其中,I、T、L是固定长度的,在制定具体的数据协议之前,需要评估好当前项目的数据会有多少、数据的最大长度是多少,考虑好后续数据扩展也可以保证协议通用。一般I设置为1~2字节,T设置为1字节,L设置为1~4字节。
下面我们制定一个格式:

实际中,如果在物联网系统中数据传输,我们用户自定义的协议字段可能就只包含如上四个字段就可以了。比如我们公司的云平台上的用户数据格式用的就是类似ITLV这样的格式。用户在制定协议时的协议字段包含如上字段就可以了。
没有包头做一些数据区分,也没有校验字段,只包含如上字段就能保证数据可靠传输吗?
因为端云通信采用MQTT,基于TCP,TCP的特点就是可靠的,网络协议中会带有校验。并且,实际在传输用户数据时,还会再用户数据之前增加一些字段区分这就是用户数据。所以,其实基于它的设备SDK来进行开发,操作的数据就是如上的数据。
但是,如果应用于板与板之间的通信,只包含如上字段自然是有风险的。我们至少还需要还要包头、校验字段。
实际中根据需要还可以增加其它字段,比如如果需要分包发送,还需要增加包号;如果多块板之间进行通信,还需要增加发送数据目标地址等。
这里我们增加包头与校验字段:

其中:
(1)Head固定为0x55、0xAA。
(2)Length为1字节,即Value最大为256B。
下面以例子来演示ITLV格式数据的处理。
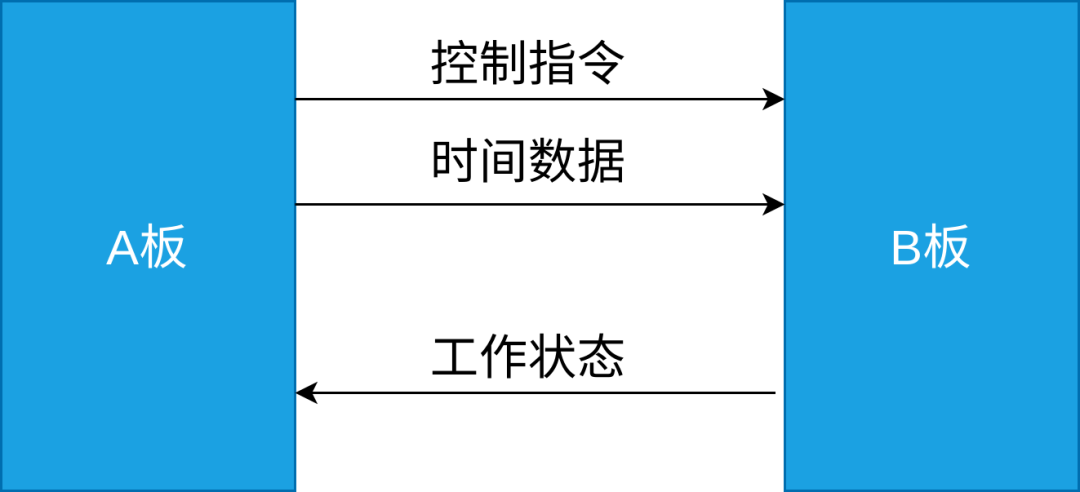
下面我们以上面我们制定的协议编写A板的组包、解析代码。
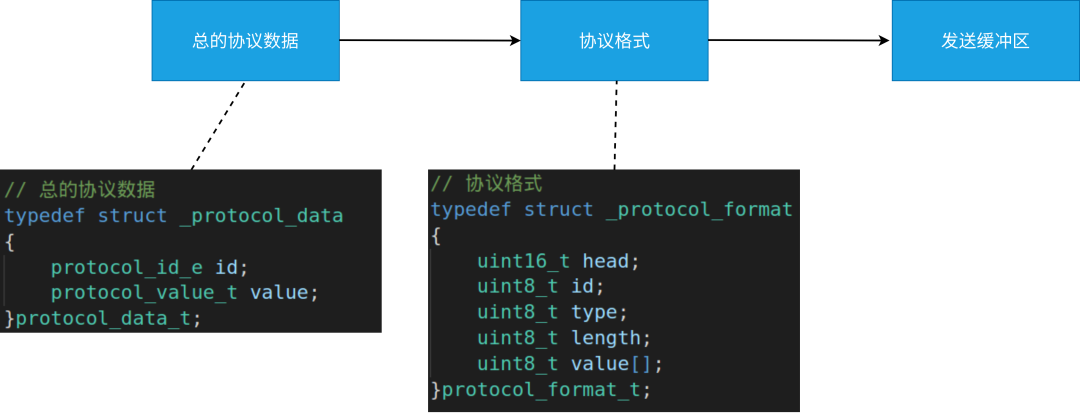
首先,我们创建一个协议格式结构体:
#pragma pack(1)
// 协议格式
typedef struct _protocol_format
{
uint16_t head;
uint8_t id;
uint8_t type;
uint8_t length;
uint8_t value[];
}protocol_format_t;
type字段的取值:
// TLV 数据类型type
typedef enum _tlv_type
{
TLV_TYPE_UINT8,
TLV_TYPE_INT8,
TLV_TYPE_UINT16,
TLV_TYPE_INT16,
TLV_TYPE_UINT32,
TLV_TYPE_INT32,
TLV_TYPE_STRING,
TLV_TYPE_FLOAT,
TLV_TYPE_BYTE_ARR, // 字节数组
}tlv_type_e;
下面设计我们的收、发数据结构,大致思路如下:
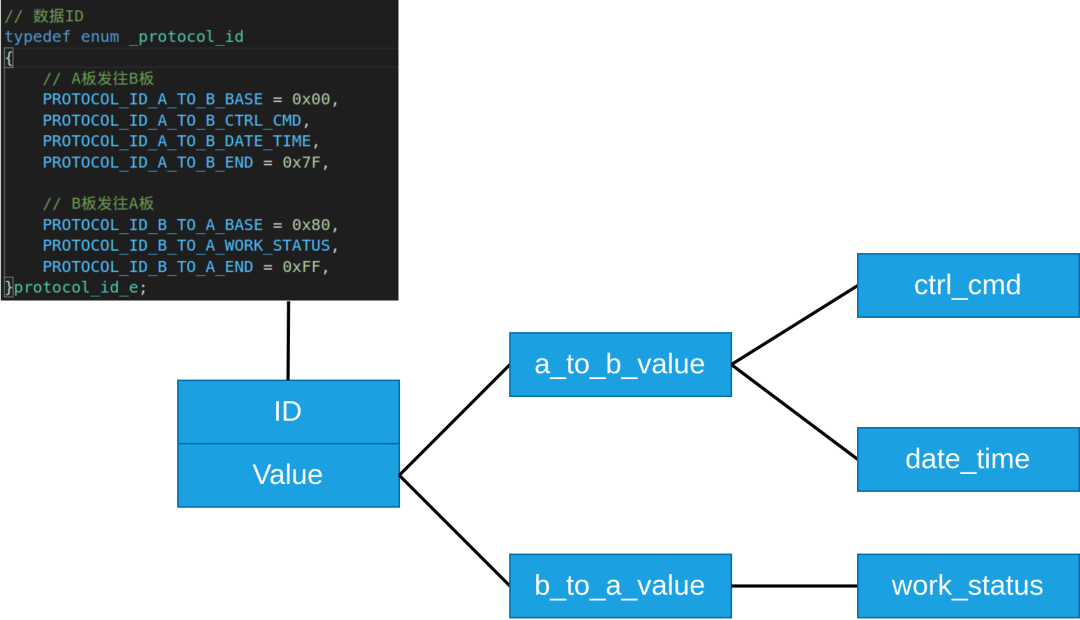
我们创建一个总的结构体,用于管理A板往B板发送及A板接受来自B板的数据:
// 总的协议数据
typedef struct _protocol_data
{
protocol_id_e id;
protocol_value_t value;
}protocol_data_t;
其中,成员id是一个枚举:
左右滑动查看全部代码>>>
// 数据ID
typedef enum _protocol_id
{
// A板发往B板
PROTOCOL_ID_A_TO_B_BASE = 0x00,
PROTOCOL_ID_A_TO_B_CTRL_CMD,
PROTOCOL_ID_A_TO_B_DATE_TIME,
PROTOCOL_ID_A_TO_B_END = 0x7F,
// B板发往A板
PROTOCOL_ID_B_TO_A_BASE = 0x80,
PROTOCOL_ID_B_TO_A_WORK_STATUS,
PROTOCOL_ID_B_TO_A_END = 0xFF,
}protocol_id_e;
包含着A->B、B->A的ID,因为ID是用1个字节标识,收、发的ID各预留一半,新增的ID在各自的BASE ID及END ID之间添加。
成员value是一个联合体,用于管理A->B、B->A的value数据:
左右滑动查看全部代码>>>
// 所有协议数据value值
typedef union _protocol_value
{
protocol_value_a_to_b_t a_to_b_value;
protocol_value_b_to_a_t b_to_a_value;
}protocol_value_t;
a_to_b_value及b_to_a_value也是联合体,用于管理更细分的数据:
左右滑动查看全部代码>>>
// A板发往B板的数据value值
typedef union _protocol_value_a_to_b
{
protocol_data_ctrl_cmd_t ctrl_cmd;
protocol_data_time_t date_time;
}protocol_value_a_to_b_t;
// B板发往A板的数据value值
typedef union _protocol_value_b_to_a
{
protocol_data_work_status_t work_status;
}protocol_value_b_to_a_t;
更细分的数据:
左右滑动查看全部代码>>>
// 控制命令
typedef enum _ctrl_cmd
{
CTRL_CMD_LED_ON,
CTRL_CMD_LED_OFF
}ctrl_cmd_e;
typedef struct _protocol_data_ctrl_cmd
{
ctrl_cmd_e cmd;
}protocol_data_ctrl_cmd_t;
// 时间数据
typedef struct _protocol_data_time
{
int year;
int mon;
int mday;
int hour;
int min;
int sec;
}protocol_data_time_t;
// 工作状态
typedef enum _work_status
{
WORK_STATUS_NORMAL,
WORK_STATUS_ERROR
}work_status_e;
typedef struct _protocol_data_work_status
{
work_status_e status;
}protocol_data_work_status_t;
明确了我们需要进行交互的数据的类型之后,解析来我们就可以根据它们的特点来编写组包、解析函数了。
大致思路如下:
组包函数:
左右滑动查看全部代码>>>
int protocol_data_packet(uint8_t *buf, uint16_t len, protocol_data_t *protocol_data)
{
int ret = -1;
int value_len = 0;
int offset = 0;
protocol_format_t *p_protocol_format = NULL;
if (!buf || !protocol_data || len < PROTOCOL_MIN_LEN)
{
printf("Invalid input argument!\n");
return ret;
}
// 通过ID来获取value的长度
switch (protocol_data->id)
{
case PROTOCOL_ID_A_TO_B_CTRL_CMD:
{
printf("PROTOCOL_ID_A_TO_B_CTRL_CMD\n");
value_len = sizeof(protocol_data->value.a_to_b_value.ctrl_cmd);
printf("protocol_format.length = %d\n", value_len);
break;
}
case PROTOCOL_ID_A_TO_B_DATE_TIME:
{
printf("PROTOCOL_ID_A_TO_B_DATE_TIME\n");
value_len = sizeof(protocol_data->value.a_to_b_value.date_time);
printf("value_len = %d\n", value_len);
break;
}
default:
break;
}
// 为协议格式数据申请内存
p_protocol_format = (protocol_format_t *)malloc(sizeof(protocol_format_t) + value_len);
if (NULL == p_protocol_format)
{
printf("malloc error\n");
return ret;
}
// 填充协议数据各字段
p_protocol_format->head = PROTOCOL_HEAD;
p_protocol_format->id = protocol_data->id;
p_protocol_format->type = TLV_TYPE_BYTE_ARR;
p_protocol_format->length = value_len;
if (p_protocol_format->length <= PROTOCOL_VALUE_MAX_LEN)
{
memcpy(p_protocol_format->value, &protocol_data->value.a_to_b_value, p_protocol_format->length);
}
else
{
printf("protocol_format.length > PROTOCOL_VALUE_MAX_LEN\n");
}
// 计算校验值
uint32_t crc_data_len = sizeof(protocol_format_t) + value_len;
uint16_t crc16 = crc16_x25_check((uint8_t*)p_protocol_format, crc_data_len);
printf("crc16 = %#x\n", crc16);
// struct -> buf
memcpy(buf, p_protocol_format, crc_data_len);
offset += crc_data_len;
memcpy(buf + offset, &crc16, sizeof(uint16_t));
offset += sizeof(uint16_t);
// 释放内存
free(p_protocol_format);
p_protocol_format = NULL;
return offset;
}
大致思路如下:
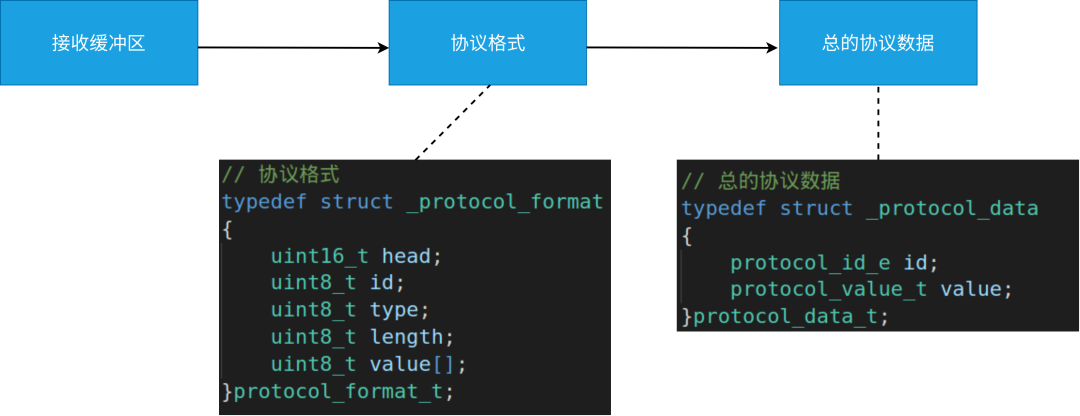
解包函数:
左右滑动查看全部代码>>>
// 解包函数
void protocol_data_parse(protocol_data_t *protocol_data, uint8_t *buf, uint16_t len)
{
protocol_format_t *p_protocol_format = NULL;
if (!buf || !protocol_data || len < PROTOCOL_MIN_LEN)
{
printf("Invalid input argument!\n");
return;
}
// 为协议格式数据申请内存
int value_len = buf[PROTOCOL_LENGTH_INDEX];
p_protocol_format = (protocol_format_t *)malloc(sizeof(protocol_format_t) + value_len);
if (NULL == p_protocol_format)
{
printf("malloc p_protocol_format error\n");
return;
}
// buf -> struct
memcpy(p_protocol_format, buf, sizeof(protocol_format_t) + value_len);
printf("protocol_data->id = %#x\n", p_protocol_format->id);
// 通过数据ID来解析各对应的数据
switch (p_protocol_format->id)
{
case PROTOCOL_ID_B_TO_A_WORK_STATUS:
{
printf("PROTOCOL_ID_B_TO_A_WORK_STATUS\n");
uint8_t work_status_len = sizeof(protocol_data->value.b_to_a_value.work_status);
if (p_protocol_format->length == work_status_len)
{
memcpy(&protocol_data->value.b_to_a_value.work_status, p_protocol_format->value, p_protocol_format->length);
}
else
{
printf("p_protocol_format->length error\n");
}
break;
}
default:
break;
}
// 释放内存
free(p_protocol_format);
p_protocol_format = NULL;
}
CRC16分很多种:CRC16-X25、CRC16-MODBUS、CRC16-XMODEM等。
这里我们使用CRC16-X25:
static const unsigned short crc16_table[256] =
{
0x0000, 0x1189, 0x2312, 0x329b, 0x4624, 0x57ad, 0x6536, 0x74bf,
0x8c48, 0x9dc1, 0xaf5a, 0xbed3, 0xca6c, 0xdbe5, 0xe97e, 0xf8f7,
0x1081, 0x0108, 0x3393, 0x221a, 0x56a5, 0x472c, 0x75b7, 0x643e,
0x9cc9, 0x8d40, 0xbfdb, 0xae52, 0xdaed, 0xcb64, 0xf9ff, 0xe876,
0x2102, 0x308b, 0x0210, 0x1399, 0x6726, 0x76af, 0x4434, 0x55bd,
0xad4a, 0xbcc3, 0x8e58, 0x9fd1, 0xeb6e, 0xfae7, 0xc87c, 0xd9f5,
0x3183, 0x200a, 0x1291, 0x0318, 0x77a7, 0x662e, 0x54b5, 0x453c,
0xbdcb, 0xac42, 0x9ed9, 0x8f50, 0xfbef, 0xea66, 0xd8fd, 0xc974,
0x4204, 0x538d, 0x6116, 0x709f, 0x0420, 0x15a9, 0x2732, 0x36bb,
0xce4c, 0xdfc5, 0xed5e, 0xfcd7, 0x8868, 0x99e1, 0xab7a, 0xbaf3,
0x5285, 0x430c, 0x7197, 0x601e, 0x14a1, 0x0528, 0x37b3, 0x263a,
0xdecd, 0xcf44, 0xfddf, 0xec56, 0x98e9, 0x8960, 0xbbfb, 0xaa72,
0x6306, 0x728f, 0x4014, 0x519d, 0x2522, 0x34ab, 0x0630, 0x17b9,
0xef4e, 0xfec7, 0xcc5c, 0xddd5, 0xa96a, 0xb8e3, 0x8a78, 0x9bf1,
0x7387, 0x620e, 0x5095, 0x411c, 0x35a3, 0x242a, 0x16b1, 0x0738,
0xffcf, 0xee46, 0xdcdd, 0xcd54, 0xb9eb, 0xa862, 0x9af9, 0x8b70,
0x8408, 0x9581, 0xa71a, 0xb693, 0xc22c, 0xd3a5, 0xe13e, 0xf0b7,
0x0840, 0x19c9, 0x2b52, 0x3adb, 0x4e64, 0x5fed, 0x6d76, 0x7cff,
0x9489, 0x8500, 0xb79b, 0xa612, 0xd2ad, 0xc324, 0xf1bf, 0xe036,
0x18c1, 0x0948, 0x3bd3, 0x2a5a, 0x5ee5, 0x4f6c, 0x7df7, 0x6c7e,
0xa50a, 0xb483, 0x8618, 0x9791, 0xe32e, 0xf2a7, 0xc03c, 0xd1b5,
0x2942, 0x38cb, 0x0a50, 0x1bd9, 0x6f66, 0x7eef, 0x4c74, 0x5dfd,
0xb58b, 0xa402, 0x9699, 0x8710, 0xf3af, 0xe226, 0xd0bd, 0xc134,
0x39c3, 0x284a, 0x1ad1, 0x0b58, 0x7fe7, 0x6e6e, 0x5cf5, 0x4d7c,
0xc60c, 0xd785, 0xe51e, 0xf497, 0x8028, 0x91a1, 0xa33a, 0xb2b3,
0x4a44, 0x5bcd, 0x6956, 0x78df, 0x0c60, 0x1de9, 0x2f72, 0x3efb,
0xd68d, 0xc704, 0xf59f, 0xe416, 0x90a9, 0x8120, 0xb3bb, 0xa232,
0x5ac5, 0x4b4c, 0x79d7, 0x685e, 0x1ce1, 0x0d68, 0x3ff3, 0x2e7a,
0xe70e, 0xf687, 0xc41c, 0xd595, 0xa12a, 0xb0a3, 0x8238, 0x93b1,
0x6b46, 0x7acf, 0x4854, 0x59dd, 0x2d62, 0x3ceb, 0x0e70, 0x1ff9,
0xf78f, 0xe606, 0xd49d, 0xc514, 0xb1ab, 0xa022, 0x92b9, 0x8330,
0x7bc7, 0x6a4e, 0x58d5, 0x495c, 0x3de3, 0x2c6a, 0x1ef1, 0x0f78
};
uint16_t crc16_x25_check(uint8_t* data, uint32_t length)
{
unsigned short crc_reg = 0xFFFF;
while (length--)
{
crc_reg = (crc_reg >> 8) ^ crc16_table[(crc_reg ^ *data++) & 0xff];
}
return (uint16_t)(~crc_reg) & 0xFFFF;
}
下面我们编写组包、解包测试代码:
测试代码如:
左右滑动查看全部代码>>>
// 微信公众号:嵌入式大杂烩
#include
#include
#include "protocol_tlv.h"
int main(int arc, char *argv[])
{
static uint8_t send_buf[PROTOCOL_MAX_LEN] = {0};
protocol_data_t protocol_data_send = {0};
int send_len = 0;
printf("\n==============================test packet===========================================\n");
// 模拟组包发送控制命令
bzero(send_buf, sizeof(send_buf));
bzero(&protocol_data_send, sizeof(protocol_data_t));
protocol_data_send.id = PROTOCOL_ID_A_TO_B_CTRL_CMD;
protocol_data_send.value.a_to_b_value.ctrl_cmd.cmd = CTRL_CMD_LED_OFF;
send_len = protocol_data_packet(send_buf, PROTOCOL_MAX_LEN, &protocol_data_send);
printf("send ctrl data = ");
print_hex_data_frame(send_buf, send_len);
// 模拟组包发送时间数据
bzero(send_buf, sizeof(send_buf));
bzero(&protocol_data_send, sizeof(protocol_data_t));
protocol_data_send.id = PROTOCOL_ID_A_TO_B_DATE_TIME;
protocol_data_send.value.a_to_b_value.date_time.year = 2022;
protocol_data_send.value.a_to_b_value.date_time.mon = 8;
protocol_data_send.value.a_to_b_value.date_time.mday = 20;
protocol_data_send.value.a_to_b_value.date_time.hour = 8;
protocol_data_send.value.a_to_b_value.date_time.min = 8;
protocol_data_send.value.a_to_b_value.date_time.sec = 8;
send_len = protocol_data_packet(send_buf, PROTOCOL_MAX_LEN, &protocol_data_send);
printf("send date_time data = ");
print_hex_data_frame(send_buf, send_len);
printf("\n==============================test parse===========================================\n");
// 模拟解析工作状态数据
uint8_t work_status_buf[11] = {0x55, 0xAA, 0x81, 0x08, 0x04, 0x01, 0x00, 0x00, 0x00, 0xf2, 0x88};
protocol_data_t protocol_data_recv = {0};
uint16_t calc_crc16 = crc16_x25_check(work_status_buf, sizeof(work_status_buf) - 2);
uint16_t recv_crc16 = (uint16_t)(work_status_buf[10] << 8) | work_status_buf[9];
if (calc_crc16 == recv_crc16)
{
protocol_data_parse(&protocol_data_recv, work_status_buf, sizeof(work_status_buf));
printf("work_status = %d\n", protocol_data_recv.value.b_to_a_value.work_status.status);
}
return 0;
}
编译、运行:
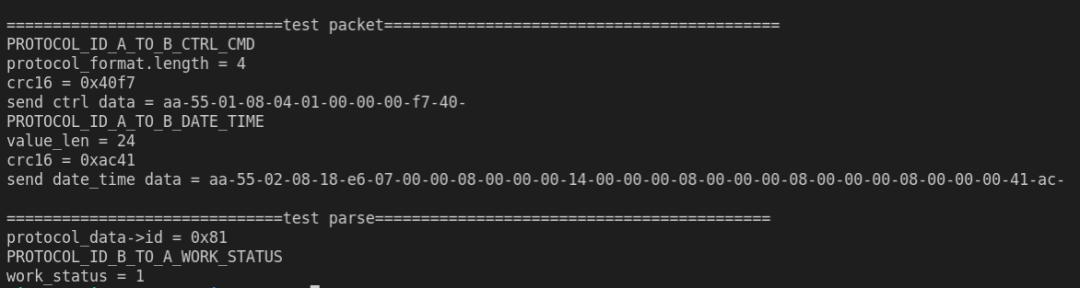
对照着我们制定的协议,数据完全正确!
ITLV格式具有很强的灵活性,我们这里使用的数据类型Type为字节数组,其实使用字符串类型也很常用,比如为了协议具备更强的可读性、方便调试,可以在Value字段里再封装一层JSON格式数据。其实我觉得Type的选项只保留字节数组及字符串就够用了,可以满足所有情况。
当然,可能有些数据长度总是定长的,也可以用其它定长的类型。比如数据都是一些定长的类型,那么L字段也可以省略掉。实际中,比较通用的做法就是:全用字节数组或者全用字符串。别混着用,代码可能会很混乱。
声明:本文素材来源网络,版权归原作者所有。如涉及作品版权问题,请与我联系删除。
------------ END ------------

●专栏《嵌入式工具》
●专栏《嵌入式开发》
●专栏《Keil教程》
●嵌入式专栏精选教程
关注公众号回复“加群”按规则加入技术交流群,回复“1024”查看更多内容。


