
文|维感科技

1
3D视觉应用于智慧拆/码垛背景介绍
在目标物体和场景多元化的物流堆垛和拆垛环节中,视觉方案不仅需要更强的兼容性和灵活性,而且需要有较强的光照环境鲁棒性,并能实时追踪与定位传送带上移动中的目标物体。3D视觉方案越来越多地应用在拆/码垛过程中,引导机器人完成纸箱、软包、麻袋、周转箱、托盘等多种物料、多种垛型的拆解,使得搬运效率和智能化程度得到大幅提升。
2
工业级RGB-D相机拆码垛
解决方案介绍
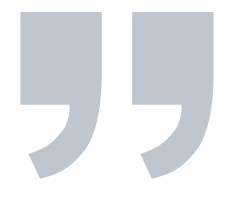
下图展示的是日本物流方案集成商Micro-Technica使用维感科技3D ToF RGB-D深度相机DCAM560C在拆垛场景的应用。
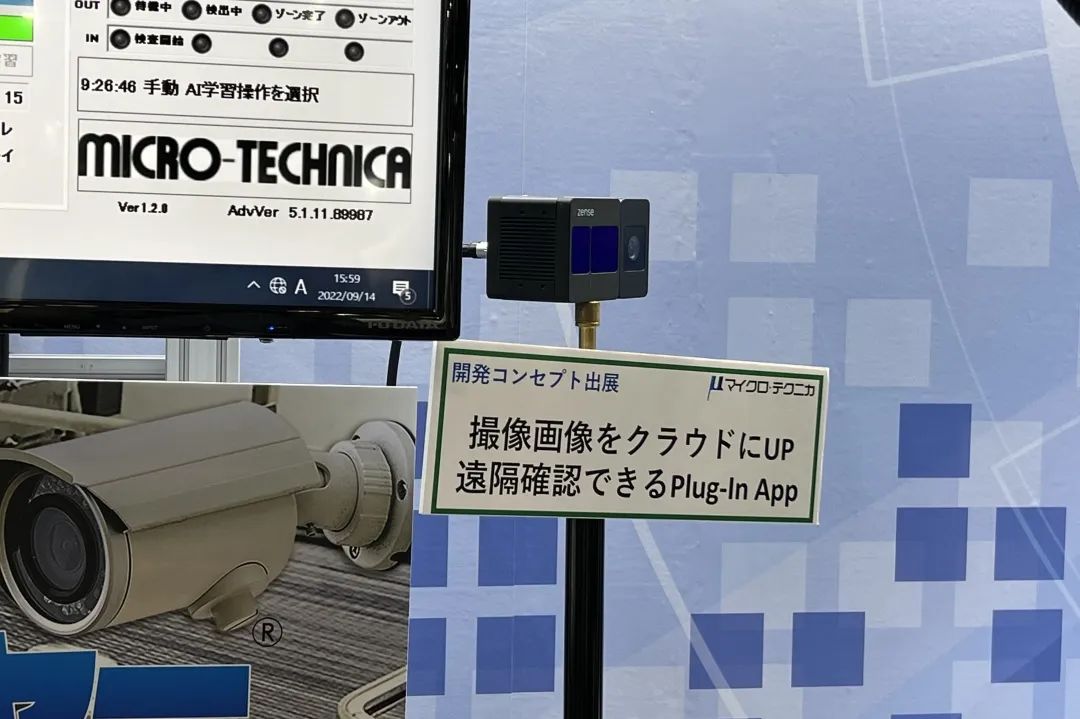
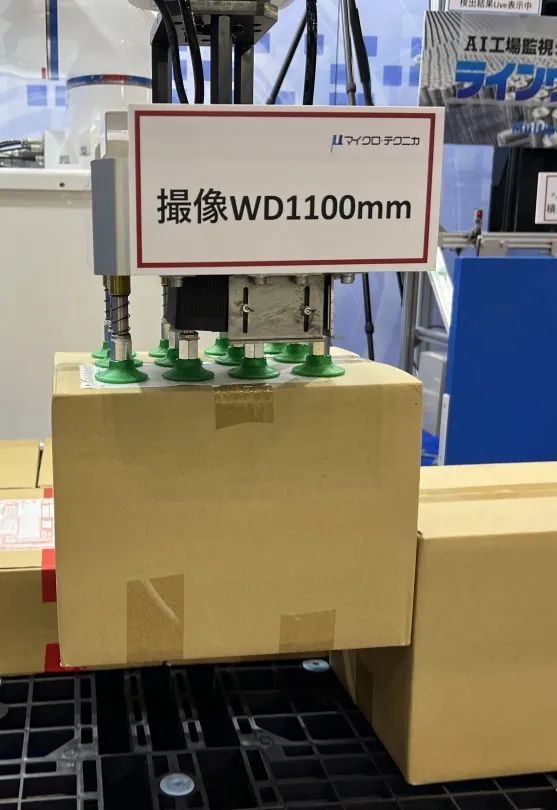
DCAM560C是维感科技推出的一款可同时输出彩色图像和深度图像的工业TOF相机,在拆垛场景中,DCAM560C可快速捕捉作业区域内包裹/货物/垛型的位置与姿态,在实时输出深度数据的同时,辅以同步彩色高清图像,并将信息发送给内置3D视觉算法和智能轨迹规划算法的系统控制平台,通过AI深度学习+3D点云分割的方法快速准确地定位到箱体位置,并通过手眼标定关系和智能轨迹规划算法获取准确的抓取点位、放置点位和轨迹点位,引导机械臂完成抓取和码放一系列动作。
另外,DCAM560C具有视场角大、边缘数据稳定、结构紧凑、计算快速、不受光照影响等特点,使其可以便捷灵活地安装在机械臂末端,辅助机械臂将货物、箱体整齐地码(或拆)在托盘或生产线上。结合了DCAM560C深度相机+算法,用户可以轻松应对多SKU且来料完全随机的拆码垛场景,在满足自动化拆码垛需求的同时,进一步提高生产效率,降低生产成本。

维感科技,工业级3D ToF感知技术领跑者
3
维感科技ToF深度相机的优势:
拆码垛视频展示

点击关键词 获取相关资料
联盟活动:第十一届工业物流与仓储智能化大会 | 第十届产线与仓储物流大会 | 第四届国际移动机器人大会 | 2021移动机器人行业发展年会
标准建设:《工业应用移动机器人》10项团体标准下载 | 2022年新三项团体标准

