我目前是个啥情况?找我没见过的,买不起的,研究个遍~
先给大家展示一下刑天:

不少人也见过
其实我在想,为什么叫刑天?我查了一下资料,我觉得可能就是因为长的像而已。

刑天玉神像
中国古玉器研究会山东收藏家“尚古玉”的古代玉雕藏品。其前身有脸面,顶戴诸侯王冠。其实我也没有问大哥具体起名的缘由,现在都一点多了,不打扰大哥了,我之后问到再补~
哈哈哈,一图胜千言了~

机器人很不爽,并且还撞了你(我要集成这个功能,听到不友好的,直接!)
我发现,这个机器人还是有一些操作上面的漂移,就是遥控器停了,机器人还会往前面滑动,以及过狭小的空隙,还不是很容易的过去,这里需要设计一些算法快速的过去,因为自主机器人这个场景还是很多的,而且也没有好的算法。
当然这搞个遥控器搞来搞去,也不是个办法,比如你可以编程控制:
家人们,这算原厂技术支持了

谢谢张总!
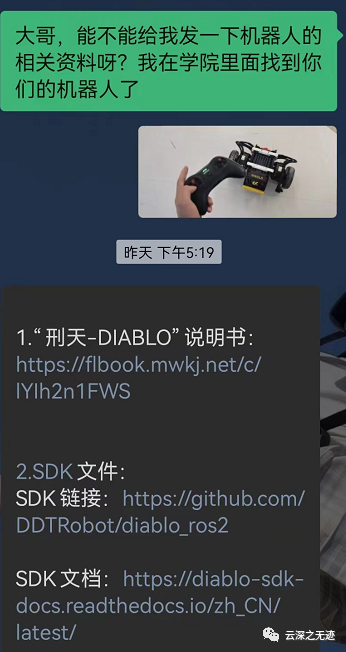
方便大家开发,我这里就把链接放上了:
1.“刑天-DIABLO”说明书:
https://flbook.mwkj.net/c/lYIh2n1FWS2.SDK文件:
SDK链接:
https://github.com/DDTRobot/diablo_ros2SDK文档:
https://diablo-sdk-docs.readthedocs.io/zh_CN/latest/刑天的箱子很大,我明天去拍~
说明书这里显示DJ,是偶然还是必然?还是喜欢本末变成第二个DJI一样的公司!
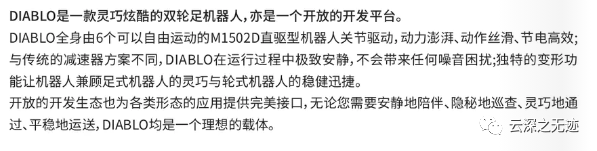
吃了德芙一样的丝滑
几个面的样子
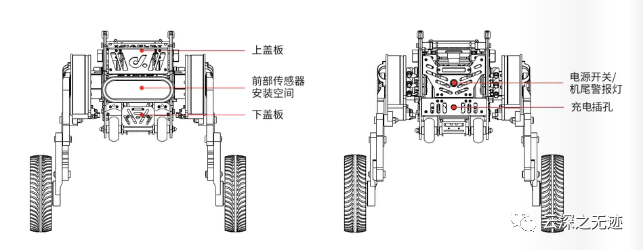
正面
这个面我还没有细看
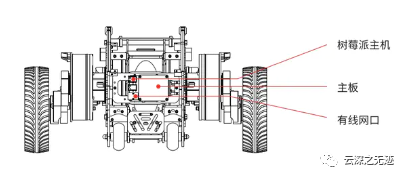
下个主机又何必是树莓派?地平线也不是不可以

我为地平线带盐
电池应该是:

这种动力的电池,性价比比较高

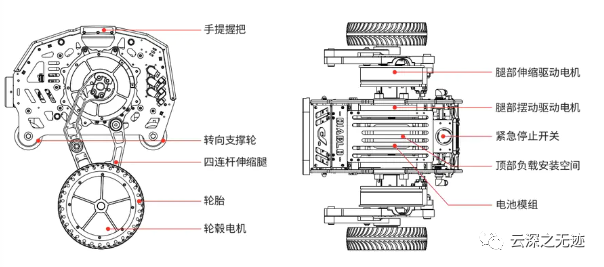
机器人就嬲的一个电机,看看电机的参数
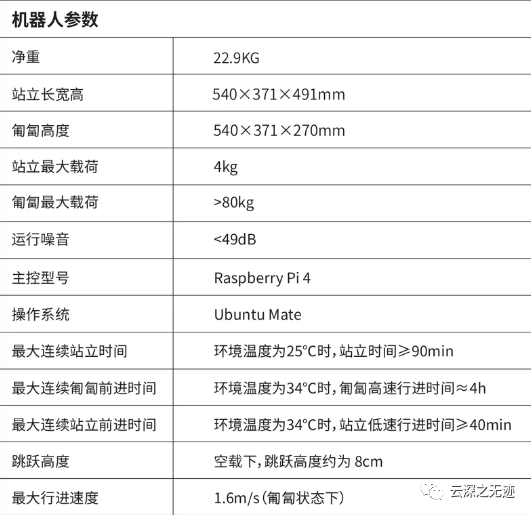
这个是机器人的一些基本参数,可以看到小于80kg的负载。。。很强嗷

遥控器有点廉价的感觉。。。

这个是遥控器的样子

接收机,应该是SBUS的信号
其实标准的SBUS信号就可以控制,换遥控器也可以的。
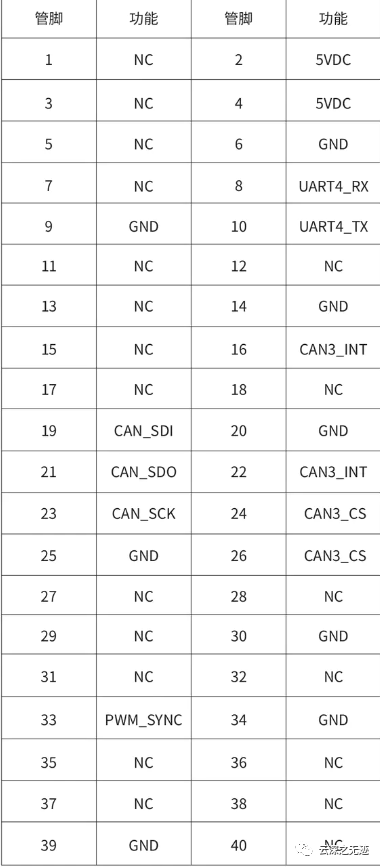
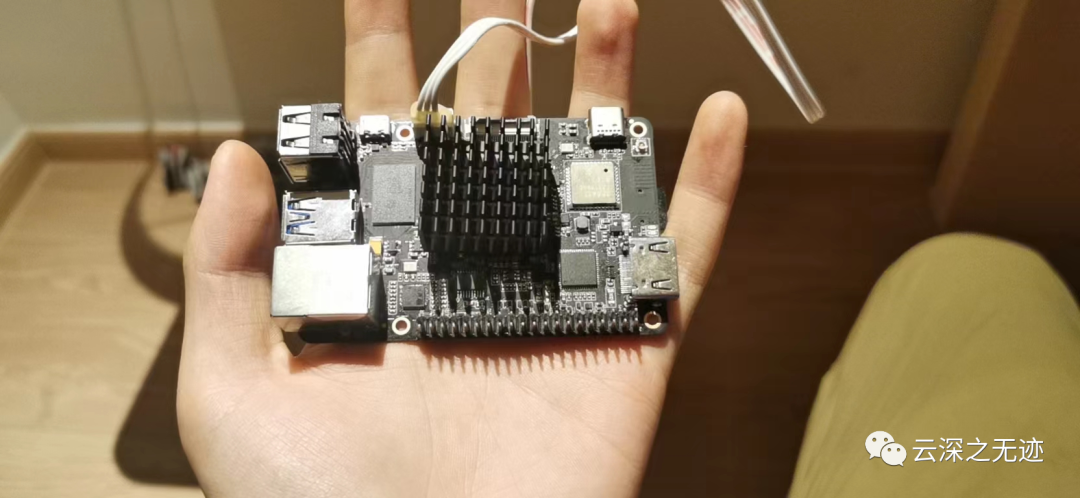
这个是Pi 4B的引脚map

这里我搞个视频演示
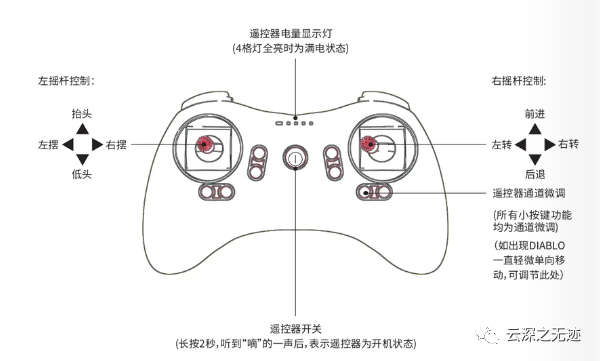
这个是一个遥控器的控制图示,右边就可以控制机器人的全部运动
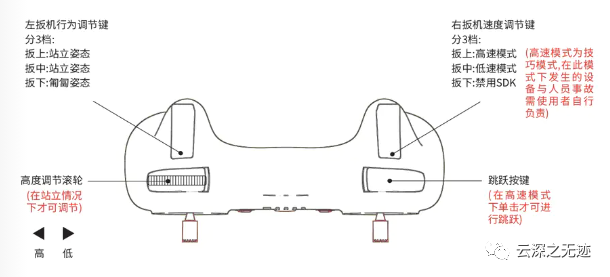
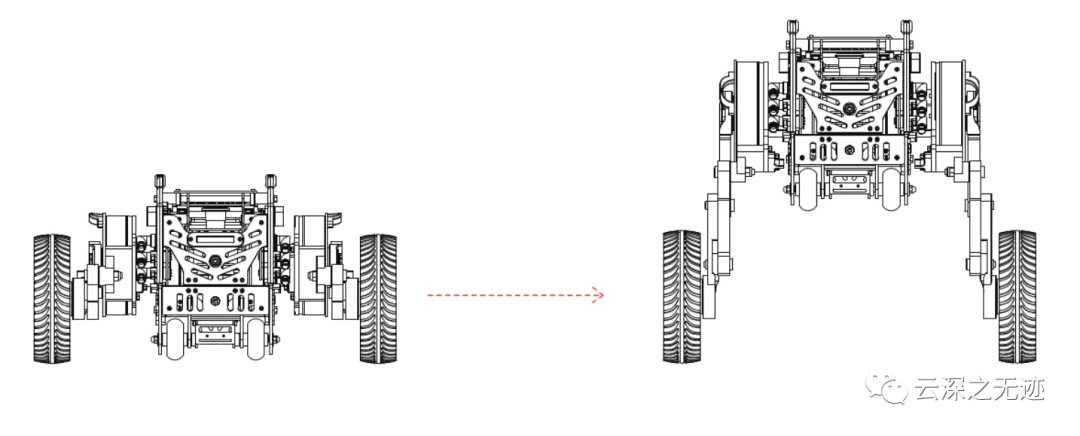
默认是匍匐的,需要切换成站立,这里设计了4个小轮子在下面
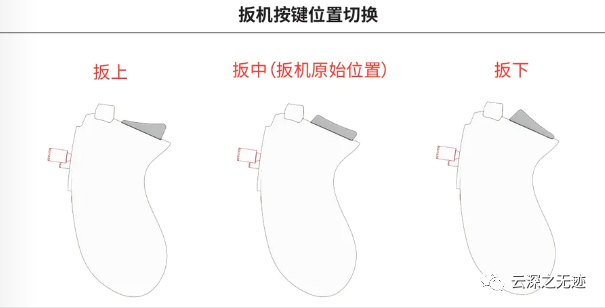
怕你看不明白还有侧面的图示
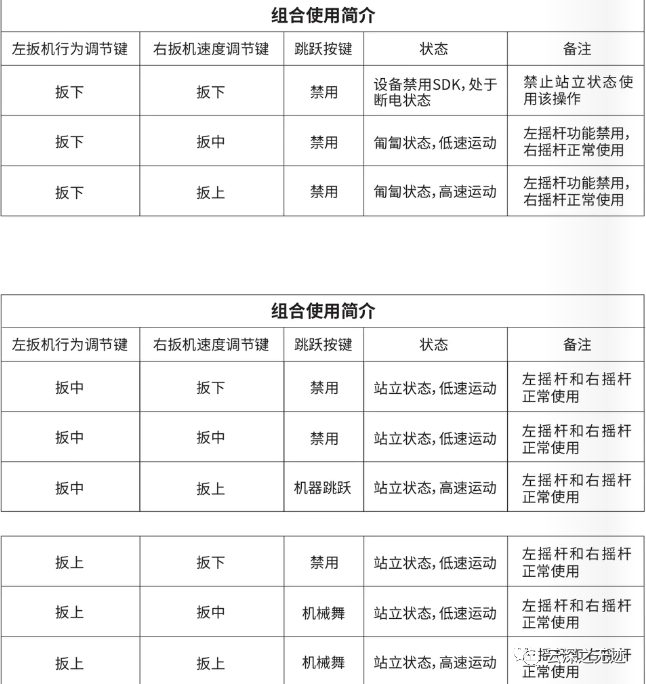
这个是相当于操作的组合图
日常最多的就是这个站立了,剩下的去看说明书哇,没有必要写了
这个就是待机状态的刑天

以及装它的大箱子
至于ROS控制的文章写到下篇文章,先埋个伏笔。
https://www.radiolink.com.cn/docc/t8sbtsm1.html