美国海军针对2030年组建有人-无人混合舰队的目标,正在多举措推进无人平台及自主性等相关技术的开发、部署和测试。无人海上自主架构(unmanned maritime autonomy architecture,UMAA)是美海军自主性工作的重要成果,它将实现所有无人海上载具(UMV)的标准化。目前,该架构已包含在美海军大型和中型无人水面艇(USV)项目、“剃刀鲸”无人潜航器(UUV)、以及“蛇头”大型无人潜航器(LDUUV)等项目的合同文件中。
除了UMAA,美国海军无人水下和水面的不同计划和项目中已经使用了许多自主架构和标准。自2006年以来,美国材料与试验协会(ASTM)提出的《F2541 UUV自主和控制标准》一直是无人系统开发团队的指南。该标准是美国海军首次尝试为自主系统提供一个管理框架。ASTM UUV标准的功能架构如图1所示。该标准规定的术语和定义曾被普遍使用,但它缺乏支持软件重用、软件组件模块化、以及关键技术升级的能力,2015年该标准已被撤销。
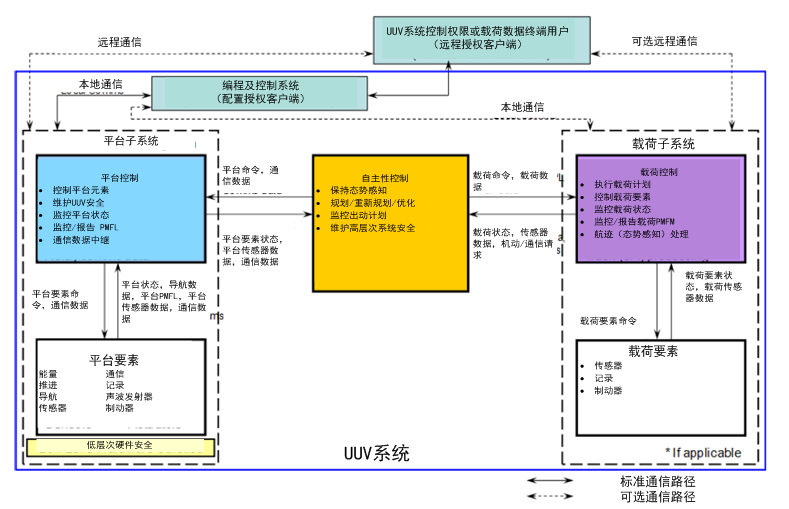
图1 ASTM的UUV自主架构
目前美国海军采用的两个标准为无人系统联合体系结构(JAUS)与无人系统控制部分(UCS)体系结构。JAUS采用了面向服务的架构方法,将无人系统的能力表示为被定义的服务。JAUS目前定义了大约75种服务,包括机动性、环境传感性能、串行机械手性能等。UCS架构始于无人机系统(UAS)控制部分架构。2015年,UCS的范围扩大到包括所有无人平台。UCS架构为控制软件的规范、集成、实施和部署提供了面向服务的架构(SOA)和建模框架。UCS架构将平台独立性定义为软件操作环境的独立性,这使得它可以在不同的计算基础架构上使用不同的通信协议来实现。UCS架构是可扩展的,描述了大约150种应用软件服务。
UMAA是一套标准化体系结构,用于组织软件代码和公共接口,以确保它们都是可互操作的。无人海上系统(UMS)由指挥和控制(C2)、一个或多个无人海上平台、支持设备和软件组成。UMAA的范围集中在无人海上平台的自主上。这包括各种无人海上平台的自主性、以及在任务中支持与其C2系统进行不同级别的通信(即持续、间歇或无通信)。
美国海军无人海上系统项目办公室(PMS 406)正在多方协调,试图以UMAA作为海军标准。对现有的项目,PMS 406已在2022年4月20日制定了v5.2.1版UMAA计划,对不采用UMAA的项目,需提出申请以供批准。
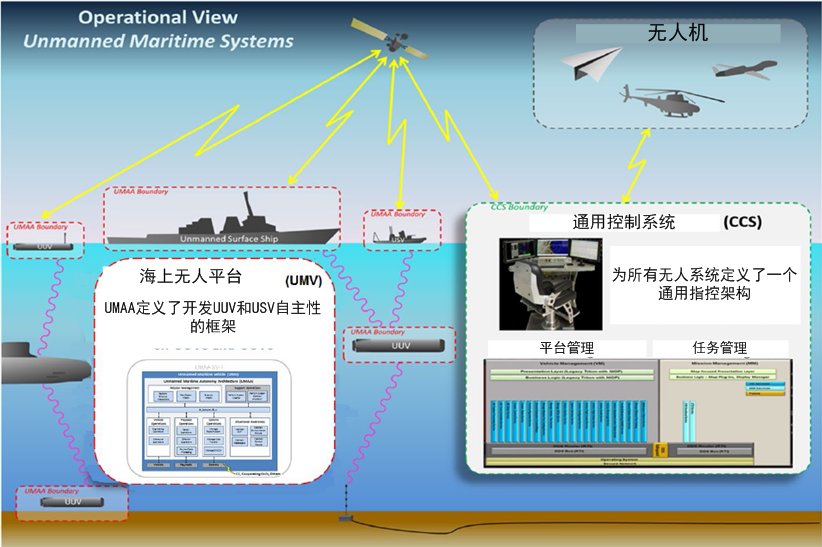
符合UMAA的无人海上平台必须与其C2系统互补,如美国海军的通用控制系统(CCS)、TOPSIDE等。UMAA支持在无人海上平台上的完全自主决策,而CCS通过操作员界面支持人在回路上的决策。UMAA将考虑CCS使用的标准。CCS与UMAA的互补关系如图2所示。
UMAA是模块化开放式体系架构,支持模块化、可分解、可替换和可互换的软件,以便服务可以通过开放接口用于各种应用程序中。UMAA的开放性可以使用美国海军开放架构评估工具(OAAT)3.0版进行评估。
UMAA的功能属性包括:
1) 使用松耦合。该架构必须能够使UMV由一组独立的松耦合服务组成,形成一个模块化系统。这些服务包括但不限于平台控制、传感器、有效载荷和态势感知。
2) 允许成对更改。如果有两个服务需要变更外部接口,而其他使用该数据的服务无需修改接口,则其它服务不需要重新编译和重新交付软件。
3) 可持续性。该体系结构必须支持模块化服务。在不影响其他服务的情况下,可替换其中一个服务。这一要求将提高采用该架构的UMV的可持续性。
4) 可升级。该架构支持以最小改动将新功能集成到自主系统中。所有新旧服务必须集成为一个无缝的系统。新功能包括但不限于支持长期自主运行、多平台任务和有人/无人协同等。
5) 以网络为中心。美国国防部已经对所有平台和项目提出了以网络为中心的要求。UMAA需要与以网络为中心的服务进行互操作。UMAA向外部平台提供的服务包括但不限于位置数据、环境数据、目标数据等。UMAA将最大限度地利用海军企业的现有标准来支持以网络为中心。
6) 实现跨平台功能通用性。UMAA支持跨平台服务定义。UMAA的跨平台领域包括水面和水下无人平台,并把空中和地面平台作为其未来目标。UMAA有望在不同平台之间共享公共服务,并支持公共软件开发。
7) 支持验证。所有的架构需求和已实现的接口均可验证。
8) 支持软件重用。该架构必须定义软件服务,以便实现软件重用。程序可以通过重用或扩展原有软件服务来降低成本。
9) 支持数据质量。数据质量包括有效性、完整性、一致性和及时性。使用定义明确的接口控制文件(ICD)将确保数据的完整性,并支持有效性测试。一致性和及时性是系统实现和集成的重点,但松耦合的、独立于传输的服务将允许开发者和系统集成商获得实现这些目标所需的灵活性。
10) 保证系统安全性。网络威胁急剧增加,严重威胁美国海军平台。由于平台上没有人工干预来识别、补救或解决网络攻击,UMV更容易存在网络漏洞。UMAA将采用网络安全措施来确保平台软件、通信和多级安全,并具备防篡改功能。
11) 支持安全关键软件。安全关键软件是指,如果发生响应失败(包括对激励的意外响应、在需要时未能响应、无序响应或其他类型的响应失败)的情况,可能会导致安全问题或重大材料损失的一类软件。UMAA架构将促进“安全关键”和“非安全关键”软件模块的分离。当软件更新不影响安全关键自主软件时,采用模块化和开放接口设计的独立模块将促进灵活性并减少测试负担。这种分离减少了测试和验证安全关键软件的大量工作和时间。
UMAA由一组服务定义组成,定义包括了服务的预期功能和接口。系统集成商通过开发符合UMAA的互操作软件组件来建立体系结构,以满足特定的任务系统要求。该架构假设所有软件组件之间有一个公共的自主数据总线,出于安全或其他设计原因,特定的程序可能会要求总线分段。该架构允许服务被实例化,并将服务部署在联网的计算平台上。
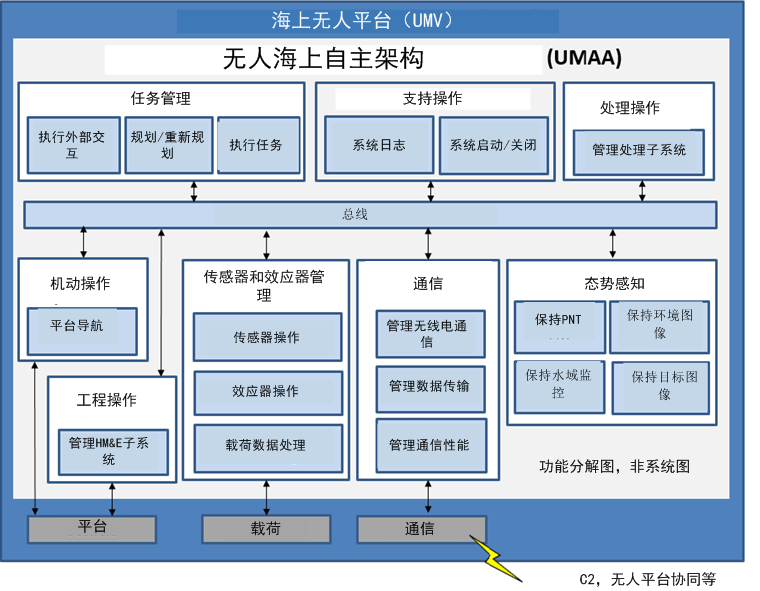
为了进行模块化开发并升级自主系统的功能,UMAA定义了八个核心功能,包括:任务管理、工程操作、机动操作、处理操作、传感器和效应器管理、通信操作、支持操作和态势感知。图3描述了这八个核心功能的功能分解以及其中的代表性功能。
3.1
任务管理
任务管理提供整个任务的管理和执行,并控制系统的整体操作。任务管理为无人海上平台提供了自我管理能力,使其能感知外部环境(传感器和效应器管理和态势感知)、自我感知以保持其运行状态(工程操作)、进行平台机动控制(机动操作)、管理与外部实体的通信(通信操作)。外部C2与任务管理之间的一个关键差异在于,运用哪个系统作机动决策。对于需要“人在回路中”的系统,C2系统将提供路径规划和机动控制。对于启用全自主控制模式的系统,平台内的任务管理将提供路径规划,并通过机动操作执行机动。对于“人在回路上”的情况,任务自主性可以在需要时反馈给操作员进行干预和验证。在自主操作中,任务管理路径规划部分将为无人海上平台生成一个路径规划,还将向路径规划者提供平台和有效载荷约束,使其能够选择满足约束条件的路径。
3.2
机动功能
该功能管理和控制无人海上平台的行动。机动必须考虑平台约束(例如,最大/最小速度和加速度、最小转弯半径、最大深度、燃料负载等)、当前状态(位置、速度、电池电量等)以及配置参数(到障碍物的最小距离、最大交叉航迹误差等)。
3.3
工程操作
该功能管理与平台硬件和软件相关的决策,包括优化平台资源的使用。它还负责维护平台上所有的健康、安全和环境系统;同时包括发电站的重新配置,电气、软件和机械配置。
3.4
传感器和效应器管理
该功能管理和控制有效载荷组件,组件包括无人系统上的传感器和效应器。有效载荷的管理将基于任务目标和当前的态势感知。随着任务的进展,管理功能应采用必要的有效载荷,并随着环境的变化调整有效载荷的配置。
3.5
通信功能
该功能管理带宽和封包路由,根据优先级、网络可用性等因素优化多条通信链路。通信操作与无人海上平台上的所有通信设备都有接口。不过在大多数情况下,由于物理原因,水下无人平台的通信是断断续续的。
3.6
态势感知
态势感知包括水域相关情况、环境图像(水深测量、海图、气象和海洋数据)、目标图像(红方、蓝方和中立方目标、障碍物等)以及位置、导航和时统(PNT)。态势感知对于导航和任务成功执行至关重要。它既包括通过传感器对环境的实时感知,也包括使用任务前加载的或在运行中从外部来源更新的先验数据。UMAA架构中,态势感知数据能够通过公共自主数据总线发布,便于共享。
3.7
处理功能
该功能管理软件服务,它将来自传感器和其他系统的数据提炼为更高级的信息结构。例如,形成声纳波束、图像处理算法、尾流检测算法等。
3.8
支持功能
该功能为服务提供支持,这些服务可以在UMAA的所有其他功能之间共享。这些操作为基础设施服务提供了公共接口。
UMAA利用基于网络的通信在各服务之间进行数据和信息交换。UMAA主要使用三种高级接口模式进行服务间通信:
1) 发布/订阅:单个数据源的发布/订阅和多个接受者,例如,导航数据被推送给多个接收者;
2)请求/回复:固定源向用户提供的请求/回复数据,例如用户请求的环境数据;
3)命令/响应:单一来源向单个固定用户提供的命令/响应数据,例如,机动作战需要的航路点数据以及用户响应。
UMAA有几个影响数据管理架构的定义特征。第一,服务不是由单个供应商开发或由单个实体采购的,并且它们的开发和交付时间不一致。因此,必须正确管理数据及其属性的规范,定义的更新必须由管理机构控制和协调。第二,UMAA需要考虑整体所需的处理能力和硬件因素。因此,某些功能可能不适用于较小、功能较弱的平台。第三,UMV的数据是秘密的,而且密级不同。必须仔细设计UMAA,以支持不同级别的数据分离,并注意如何从系统中提取数据。第四,UMV的大部分数据都是暂时的,它需要在严格的延迟限制时间内遍历系统。第五,UMV可以采用数据压缩技术来减少存储容量需求或增加持久性。UMAA接口定义必须考虑并处理这些延迟要求。
END
