




关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯

AEBS的发展历程
说起AEBS,首先就得从车辆制动的历史说起。在汽车工业的发展初期,制动系统是没有助力的,制动能量完全由驾驶者的作用力来提供,我们可以将这种制动系统称之为“人力制动系统”。由于没有助力,驾驶者需要费很大的力气才能让车辆停止。基于这样的现状,工程师们设计了助力系统。他们在“人力制动系统”的基础上加设了一套动力伺服系统,采用气压能、真空能以及液压能等作为伺服能量,形成了各种形式的助力器。
再后来,由于很多新手在制动时,掌握不好制动车的时机和力度,不习惯“点刹”,于是工程师们又加入了被看做是行车安全历史上最重要的三大发明之一的“ABS”(防抱死系统)。最后大家发现,即便是车辆配备了众多先进的制动技术,但前提是驾驶者得有制动的动作。而现实的情况是,在遇到突发情况时,很多驾驶者有些措手不及,还来不及制动,就已经与前车发生“亲密接触”。于是,便有了AEB(自动紧急制动系统)的诞生。
进化后的AEBS
AEBS,即“Advanced Emergency Braking System”的缩写,意为自动紧急制动系统,可以在检测到危险时通过 系 统 协 助 驾 驶 者 进 行 制动,从而避免或减少事故的发生。AEB也就是我们常听到的预碰撞安全系统,不同厂商对这套系统的称呼有所不同。简单来说, AEB就像是你在学车时,守护在您身边的那个“高度警觉的教练”。教 练 控 制 着 独 立 的 制 动 踏板,在提醒无效且追尾事故即将发生之前出手干预,危急情况下及时踩停,避免发生事故。所谓“不怕一万,就怕万一”,车辆能在紧急情况下自动制动,其重要性不言而喻。
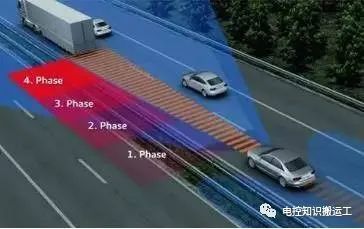
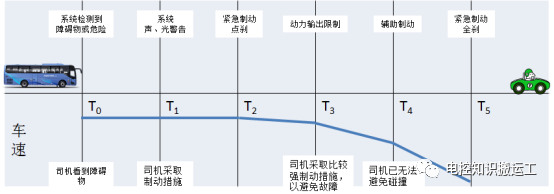
AEBS系统通过摄像头或雷达检测和识别前方车辆,在有碰撞可能的情况下先用声音和警示灯提醒驾驶者进行制动操作回避碰撞。若驾驶者仍无制动操作,系统判断已无法避免追尾碰撞,就会采取自动制动措施来减轻或避免碰撞。同时, AEB系统还包括动态制动支持,当驾驶者踩下制动踏板的力量不足以避免即将到来的碰撞时,就会为其补充制动力。AEB的作用究竟有多大呢?此前Euro NCAP通过对交通事故的分析发现, 90%的交通事故是由于驾驶者的注意力不集中而引起的,而AEB系统则有效避免或减少事故的发生。Euro NCAP和ANCAP于2015年5月共同在《Accident Analysis & Prevention》期刊发表题为“现实世界追尾碰撞中AEB的有效性”的研究报告,结果显示:AEB技术能在现实世界中减少38%的追尾碰撞,且无论是在城市道路(限速60km/h)或郊区道路行驶的情况下,效果并无显著差别。
AEBS系统工作原理
AEBS系统其工作原理很简单,主要分为三个部分:环境感知、智能决策、执行机构。目前环境感知传感器部分主要由三种探测技术,分别是:毫米波雷达、激光雷达、视觉识别。AEBS系统采用雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与报警距离、安全距离进行比较。小于报警距离时就进行报警提示,而小于安全距离时即使在驾驶员没来得及踩制动踏板的情况下,通过车载电脑AEBS系统也会启动,使汽车在安全距离内自动制动,从而为安全出行保驾护航。
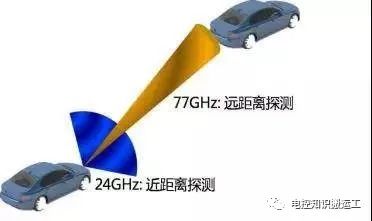
1.毫米波雷达
其本质为电磁波,其探测距离远,波束角较大,探测范围宽,用于AEBS时探测时,在本车道前方50米左右位置,其探测宽度已达3.5米,超出本车道,相邻车道的车辆容易形成干扰,其抗干扰问题无法解决。另外毫米波对金属物体非常敏感,车道前方的任何金属物体,如易拉罐、窨井盖等都容易被识别为障碍物,形成误报警、误刹车;另外对人体、墙体、树木等不敏感,所以像类似8.10事故这样的情况,根本不起作用,无法避免事故的发生。所以,单纯依靠毫米波雷达,干扰大,误报、误刹率高,基本不能使用。
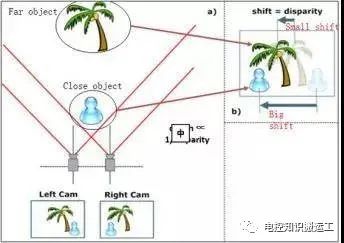
2.摄像头(视觉识别)
其本质类似于摄像机,通过这个手段可以直观识别前方障碍物情况,但是其探测距离非常有限,只能短距离探测;探测距离近,意味着留给驾驶员的反映时间大大缩短,只能低速防碰撞,无法解决高速情况下发生重特大交通事故的根本问题。更为关键的是,无法全天候使用,白天对于太阳光直射情况下,无法识别;夜晚,对向车道远光灯直射时,引起误报。所以,误报、漏报率极高,基本无法使用。
3.毫米波雷达+摄像头
两种传感器数据融合后对前方车辆或障碍物进行判断,共同认为是障碍物后,方可进行预警或制动,这样组合使用降低了毫米波的探测距离,同时视频识别的短板也都全部存在。所以组合方式的缺点是:容易受光线干扰,目标识别不准,误报、误刹、漏刹情况严重;无法解决50km/h以上的高速防碰撞问题。无法实现遏制重特大交通事故的根本目的。
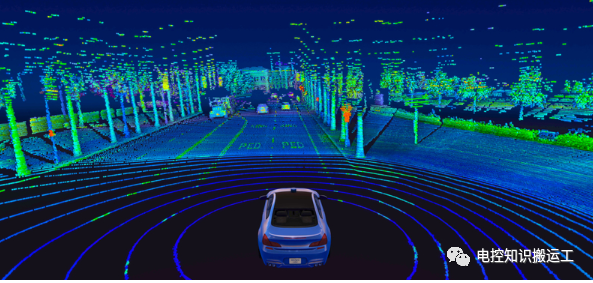
4.激光雷达
激光雷达,本质属于光,是不可见光,具备光的所有特性,传播速度快,探测距离远;但缺点是波束角小,相对盲区比较大;容易受雾霾、烟雾、灰尘等干扰。若能解决盲区和抗干扰问题,激光探测是一种很好的传感器。智能决策部分,传感器探测到相关数据之后,需要处理器处理相关信息,分析判断,发送相应指令,预警或刹车。
AEBS与EBS
那么AEBS和EBS又是什么关系?AEBS功能是否可以通过EBS系统实现呢?首先我们要知道,EBS即电子控制制动系统, 制动总泵装有制动踏板传感器,控制单元接收到踏板信号后,通过控制前桥模块、后桥模块的电磁阀实现制动输出。与传统的机械控制方式相比不仅制动响应时间更快,而且能够实现更多的控制功能,如按着轴荷分配制动力等。
而AEBS系统通过计算确认有碰撞危险时,会向EBS系统发出制动指令,EBS系统负责执行。需要说明的是AEBS系统也可以和具有ESP功能的ABS系统搭配,并不一定要基于EBS系统进行工作,这取决于车辆的实际配置。通常情况下,如果跟车距离过小、有碰撞危险时,系统首先点亮黄灯,进行警报,如果驾驶员对警报做出反应、进行了减速制动,碰撞危险被解除,就不会促发制动。但当驾驶员对警报没有做出反应、接管车辆时,才会触发二级、三级报警(红灯点亮)。红灯点亮,首先实施部分制动,如果驾驶员对警报做出反应、进行了减速制动,碰撞危险被解除,就不会促发全制动,但驾驶员对警报没有做出反应时,才会触发全制动。
