刚柔软机器人
结构仿真分析与设计
背景速览:
软体机器人技术是近年来机器人领域最为热门的研究领域之一。由于软体机器人具有天然的柔性、自适应性、低成本和被动安全性,在人机交互、医疗服务等领域具有广泛的应用前景。
同时,软体机器人的研究涉及软材料、机构设计、仿生学、微电子、控制和计算机科学等多个学科。
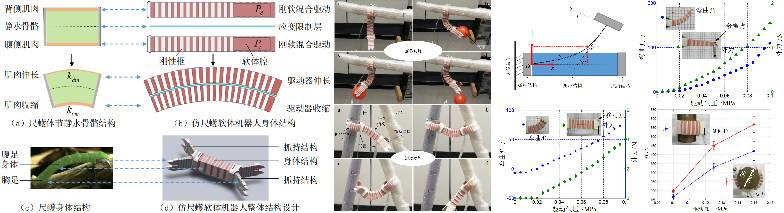
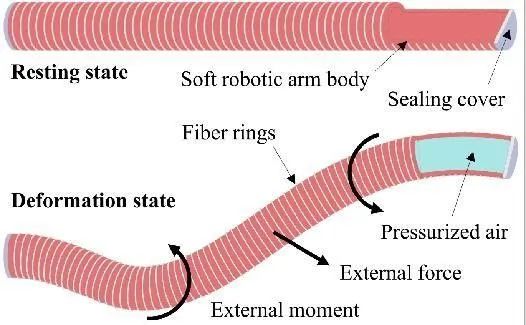
由于软体机器人通体采用柔性材料加工制造,采用流体驱动,远端控制,其执行端和运动发生端天然隔离,因此通过系统性的设计和优化,可以很好地实现轻量化、抗干扰、低成本的可更换本体,与控制和运动发生端进行区分。
应新老客户培训需求,北京软研国际信息技术研究院特举办“刚柔软机器人结构仿真分析与优化设计”系列专题培训班,本次培训由互动派(北京)教育科技有限公司具体承办。具体事宜通知如下:
01
课程特色
1、本次系列课程共2个专题,均采用在线直播的形式,提供无限次回放视频,发送全部案例代码,建立永不解散的课程群,长期互动答疑。采用“理论+实操”的讲授模式,掌握相关的算法实践及流程步骤,建立机器人结构优化设计仿真框架,解决真实场景中的问题。
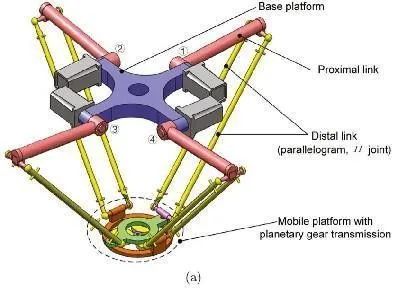
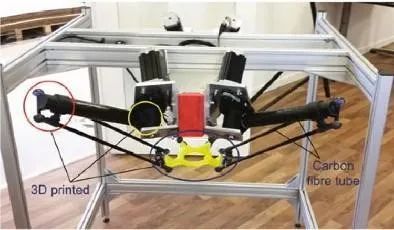
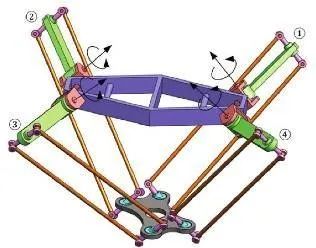
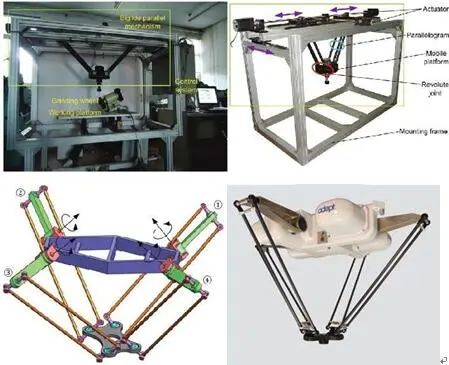
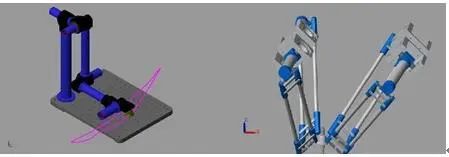
2、专题一课程力图大家掌握传统工业(串联)机器人和并联机器人构型设计及力学行为建模解析。包含机器人运动学、动力学、刚度、优化设计、控制、运动规划等方面理论与关键技术。
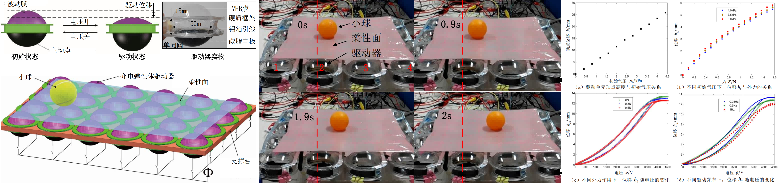
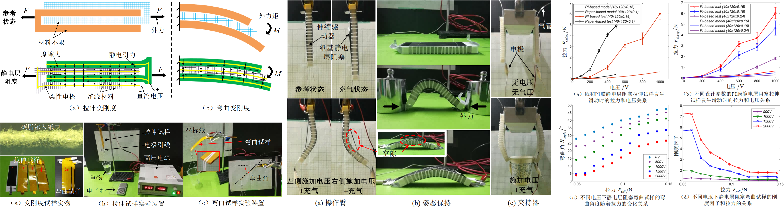
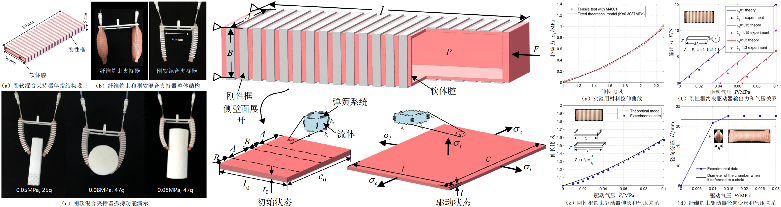
3、专题二课程力图大家掌握软体生物运动建模、软体机械臂静力学建模、软体机械臂动力学建模、软体结构实验室制作方法、非均匀软体结构变形建模等。并与专业老师一起交流探讨软体结构在设计、控制和材料等方向创新点,力图为我国软体机器人技术和产业取得源头创新成果提供科学支撑。
02
课程时间
机器人参数化建模与仿真优化设计专题
2022年10月15日-10月16日
2022年10月22日-10月23日
在线直播(授课4天)
软体机器人结构设计与仿真分析专题
2022年10月22日-10月23日
2022年10月29日-10月30日
在线直播(授课4天)
03
课程大纲
机器人参数化建模与仿真设计专题
一、机器人建模基础 | 1. 机器人运动学基础 2. 几何运动学闭环解解析法建模 3. 运动学MATLAB脚本文件编写(封闭解、构型绘制)、工具箱 4. 机器人工作空间(离散法、几何法)建模 5. 工作空间MATLAB脚本编写 6. 工作空间CAD(SolidWorks)建模 教学案例: Ø 四自由度分拣机器人 Ø 3-dof 球面并联机构 |
二、机器人运动学仿真 | 1. 机器人微分运动学(速度、加速度)建模 2. MATLAB脚本编写 3. MATLAB/Simulink运动学仿真 4. 机器人灵巧度 5. MATLAB用户界面设计(运动参数与性能界面显示) 6. 机器人奇异分析(解析方程、MATLAB、SolidWorks图形显示) 教学案例: Ø 3T1R并联机械手运动学分析 Ø 非完全对称DELTA机器人 |
三、机器人动力学仿真 | 1. 机器人动力学建模 2. 解析建模与脚本MATLAB脚本 3. Simulink、Adams仿真 4. MATLAB-Adams 5. SolidWorks & Simscape联合仿真 6. 动力学参数识别 教学案例: Ø 平面两杆机械臂仿真 Ø 球面并联机构仿真 Ø 空间3平移1转动分拣机器人 Ø 5自由度机械臂仿真 |
四、机器人刚度建模 | 1. 机器人刚度建模 2. 机器人解析建模 3. 刚度特性分析 4. MATLAB脚本 5. MATLAB/Workbench联合仿真 教学案例: Ø 球面并联机构刚度建模与分析 Ø 含子运动链机构刚度建模 |
五、机器人优化设计 | 1. 机器人优化设计:性能评价与设计指标 2. 优化模型数学建模 3. MATLAB优化工具包 4. 多目标优化(NSGA算法、无约束、有约束) 5. 优化结果分析与评价 教学案例: Ø 单目标优化非对称球面机构传动性能 Ø 双滑块磨床 Ø 约束的多目标优化球面并联机构 Ø 非对称分拣机器人 |
六、机器人控制仿真 | 1. 机器人控制 2. 动力学参数辨识 3. 控制算法(PID、前馈、计算力矩、滑膜、模糊等) 4. MATLAB-Simulink、SolidWorks-Simscape控制仿真 Ø 五自由度机械臂模糊力矩控制 Ø 五自由度机械臂Simcape整体建模 Ø 3T1R分拣机器人迭代学习控制 Ø 基于模型的3T1R分拣机器人控制 |
七、机器人运动规划 | 1. 机器人运动规划(NURBS、多项式、避障等) 2. MATLAB优化仿真 3. MATLAB-Vrep(CoppeliaSim)可视化联合仿真 |
部分案例图示:
软体机器人结构设计与仿真分析专题
一、软体机器人研究概述 | 学习目标:从整体上全面认识软体机器人领域所涉及的各方面研究内容,便于大家结合自己的研究点做广泛的交叉推演,更有利于激发创新点,突破“无想法”的僵局。 1. 软体机器人研究背景、意义 2. 软体机器人关键技术 3. 软体机器人存在问题与展望 4. 讨论与交流 |
二、经验分享与论文复现 | 学习目标:为大家提想法,写小论文提供一些借鉴 1. 如何提出自己的创新想法,突破小论文(从无到有的思考分享) 2. 先做再补充(案例论文1《关于介电弹性体驱动器》) 3. 在学术会议中捕捉(案例论文2《关于layer jamming变刚度》) 4. 在日常实验中捕捉(案例论文3《关于几何约束驱动器》) 5. 循着研究推进(案例论文4《关于仿尺蠖软体机器人》) 6. 讨论与交流 |
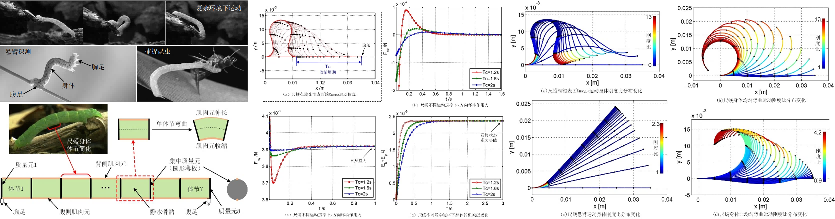
三、仿生对象的运动建模与仿真 | 学习目标:掌握基于Kane法的软体生物运动建模 1. 仿尺蠖软体机器人研究与尺蠖身体运动建模的意义 2. 尺蠖的身体结构特征与运动建模面临的难点 3. 尺蠖身体运动动力学建模与运动行为仿真(理论方法+模型推导) 4. 讨论与交流 |
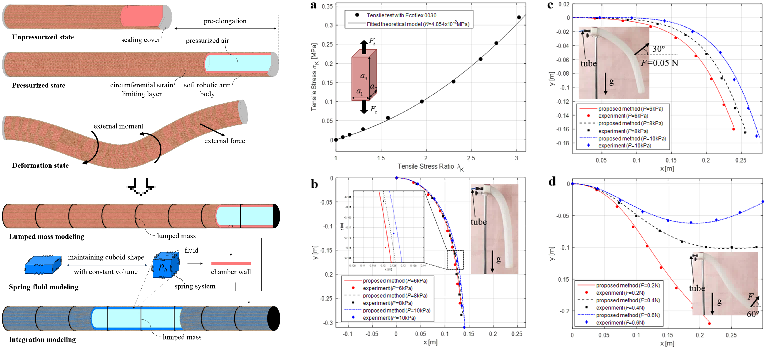
四、软体机械臂静力学建模 | 学习目标:掌握基于虚功原理的软体机械臂静力学建模方法 1. 软体机械臂研究背景与意义 2. 软体机械臂静力学建模方法研究现状与面临难点 3.融合材料和几何非线性的软体机械臂静力学建模方法研究(理论方法+模型推导+matlab仿真)
|
五、软体结构在实验中制作的方法及技巧 | 学习目标:借鉴软体结构在实验室的制作方法,学习一些技巧并开拓思路 1. 基于介电弹性体的软体功能结构制作 2.柔性约束软体气动驱动器、软体机械臂的制作 3. 刚性约束刚软混合气动驱动器、仿尺蠖软体机器人的制作 4. 颗粒阻塞/层阻塞(jamming)变刚度结构的制作 |
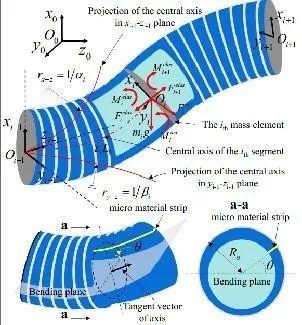
六、非均匀软体结构变形建模 | 学习目标:掌握基于连续介质力学的软体结构建模方法 1. 柔顺线性驱动器的研究背景与意义 2. 柔顺线性驱动器研究现状与面临问题 3. 一种新型柔顺线性驱动器的研究 4. 关键功能部分力学建模(非均匀轴对称软体结构的力学建模+模型推导+matlab仿真) |
七、软体机械臂动力学建模 | 学习目标:掌握基于虚功率原理的软体机械臂动力学建模方法 1. 软体机械臂动力学建模方法研究现状与面临难点 2. 融合材料和几何非线性的软体机械臂动力学建模方法研究(理论方法+模型推导+matlab仿真) 3. 讨论与交流 |
八、方向创新点 | 1. 软体结构设计方向创新点探讨 (交叉融合) 2. 软体结构控制方向创新点探讨 (深度学习) 3. 软体机器人材料方向创新点探讨 (立足于实际条件,模仿借鉴) |
九、总结与回顾 | 1、总结回顾课程内容 2、自由提问交流环节 |
部分案例图示:
04
报名费用
(含报名费、培训费、资料费)
机器人参数化建模与仿真优化设计专题
¥4300 元/人
软体机器人结构设计与仿真分析专题
¥5600元/人
费用提供用于报销的正规机打发票及盖有公章的纸质通知文件;
如需开具会议费的单位请联系招生老师要会议邀请函;
05
增值服务
1、凡报名学员将获得本次培训书本教材及随堂电子资料(案例代码);
2、凡报名学员培训结束可获得本次直播课程全部无限次回放视频
3、价格优惠:(具体请咨询招生联系人)
优惠一:2022年9月23日前汇款,并转发课程(公众号)通知到朋友圈或者到学术交流群可享受400元优惠;
优惠二:报名两个专题课程可享受额外优惠;
优惠三:凡老学员推荐报名者,可享受额外优惠,推荐者可获取现金红包;
4、学员提出的遇到的问题在课程结束后可以得到老师的解答与指导 ;
5、参加培训并通过考试的学员,可以获得:北京软研国际信息技术研究院培训中心颁发的《离散元仿真应用工程师》专业技能结业证书;
06
主讲老师
机器人参数化建模与仿真优化专题:教育部直属全国重点大学,国家“双一流”建设高校, 国家“985工程”、“211工程”建设高校副教授、硕导。主持和参与国家级及省部级各类项目10项,发表文章50余篇,在机器人学领域顶级期刊以及顶级会议发表多篇文章。在机器人结构设计、动力学控制、视觉导引、轨迹规划、多目标优化有着丰富的经验。
软体机器人结构设计专题:教育部直属全国重点大学,国家“双一流”“211”“特色985工程”“2011协同创新计划”重点建设大学讲师。主持及参与市、省、国家级科研项目5项,在《Soft Robotics》、《T-Mech》等高水平期刊发表SCI论文20余篇。在软体机器人结构设计、软体机械臂力学建模、仿生软体机器人研究方面积累了丰富经验。
07
联系方式

08
课程问答
如何报名、缴费:
1、致电专门负责行政招生的老师报名,联系方式见本文件“第七条”。
2、填写下方附件报名回执表发送到专门负责行政招生工作的老师。
3、缴费支持公对公转账、个人垫付(对公到账及时退还垫付费用,可开具垫付证明)
目前10000+人已加入我们