

关于DJI的OSDK研究了很长的一段时间,但是一直也没有摸到实物,今天在工位摸到一套,研究了半天感觉少根线,看了看说明书,确实是少根线,去找看一圈也没有,emmmmm,果然我是天生看说明书的命。

能不能整个数据线啊,家人

稍微有点战损了
那。。。今天继续看看说明书,明天拿着说明书去找线。

目前就是一堆线了,疯狂抓头

渲染图
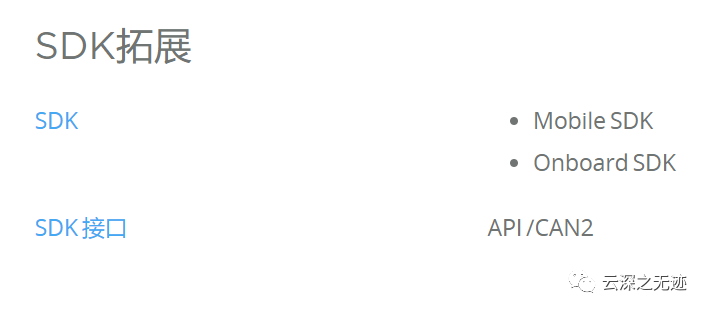
开发能力
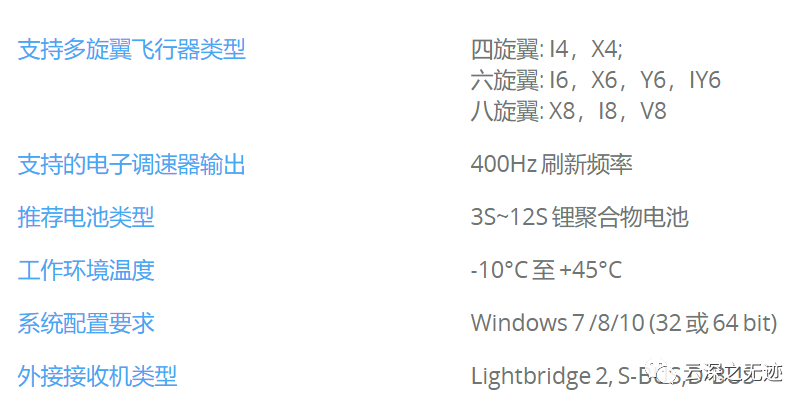
开发的一些必要信息,比如电池类型
DJI家的飞控有几种控制模式:
P模式为定位模式,使用GPS模块或视觉定位系统以实现飞行器精确悬停。
A模式为姿态模式,不使用GPS模块与视觉定位系统进行定位,仅提供姿态增稳,在GPS卫星信号良好的情况下可实现返航。
F模式为功能模式,此模式下可使用智能飞行功能。
M模式为手动模式,此模式下无姿态角度限制,由于飞行难度较高,建议在紧急情况下重新夺回控制权。
除了自家的电调,支持的还有:
市面上标准电调,1520μs中位,400Hz刷新频率。
电调一直说的事情是支持断桨飞行,支持的条件是:
a. 断桨前推质比大于2.5(推质比:升力/质量);
b. 飞行器为6轴及以上;
c. 断桨后,若飞机进入自旋,则飞机会自动切到航向锁定模式。
LED的模块上面有USB

嘿,找到了
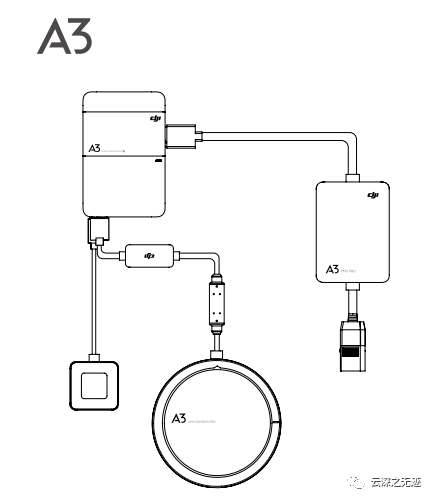
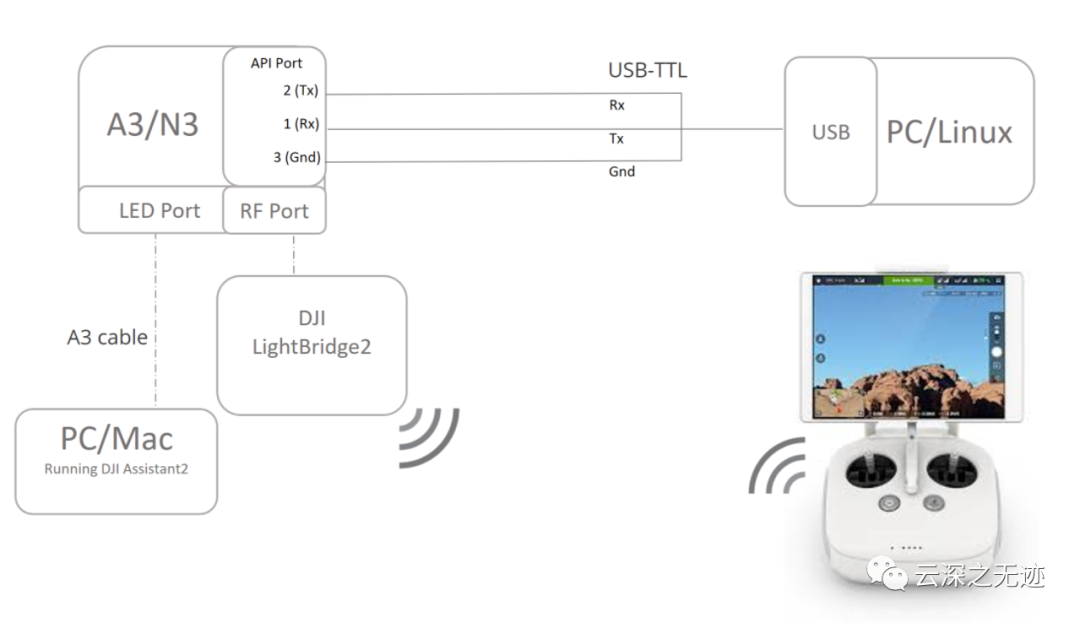
最终应该有的连接线是这样的
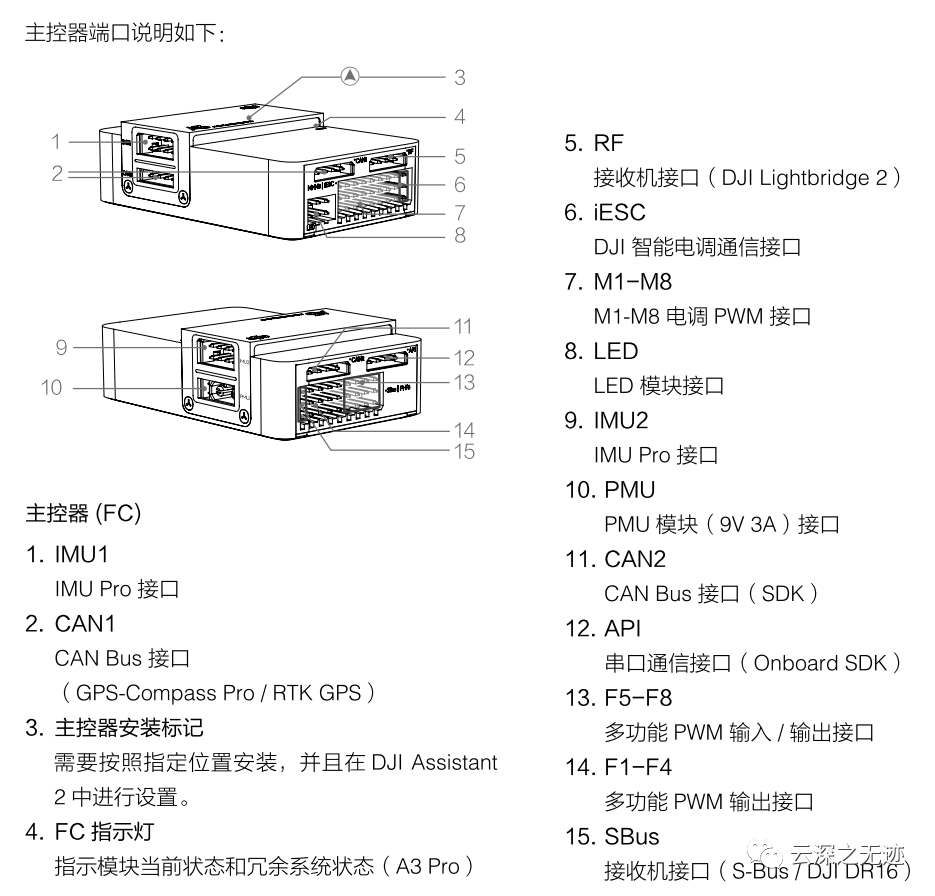
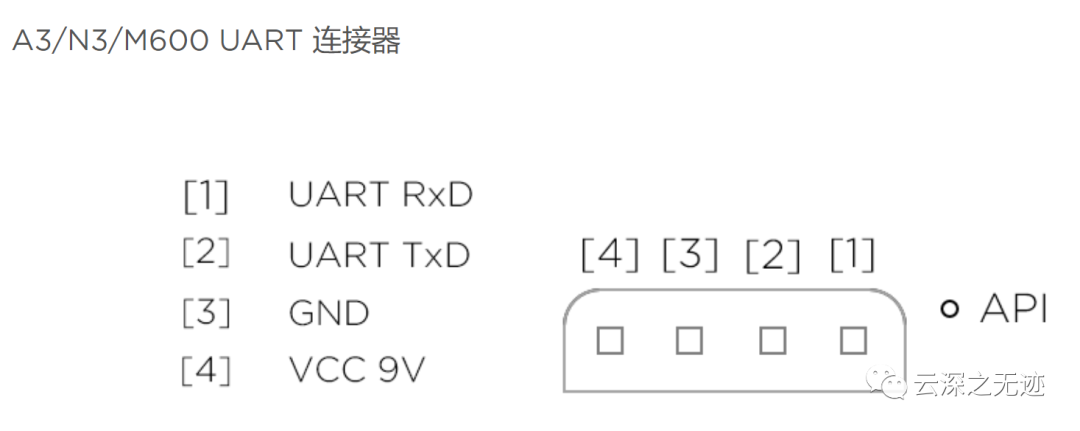
相关的接口

API这里是OSDK的API接口,盲猜是串口
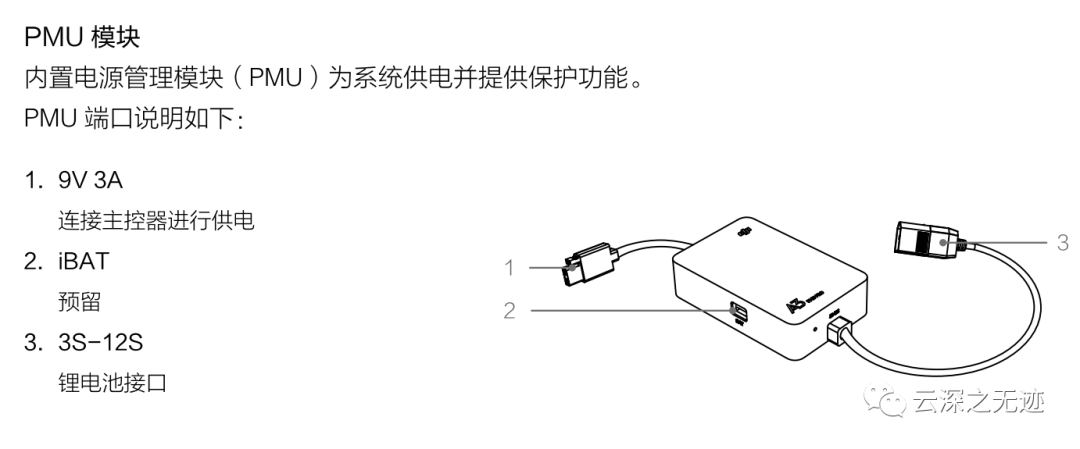
一个强大的飞控必然有一个强大的电源
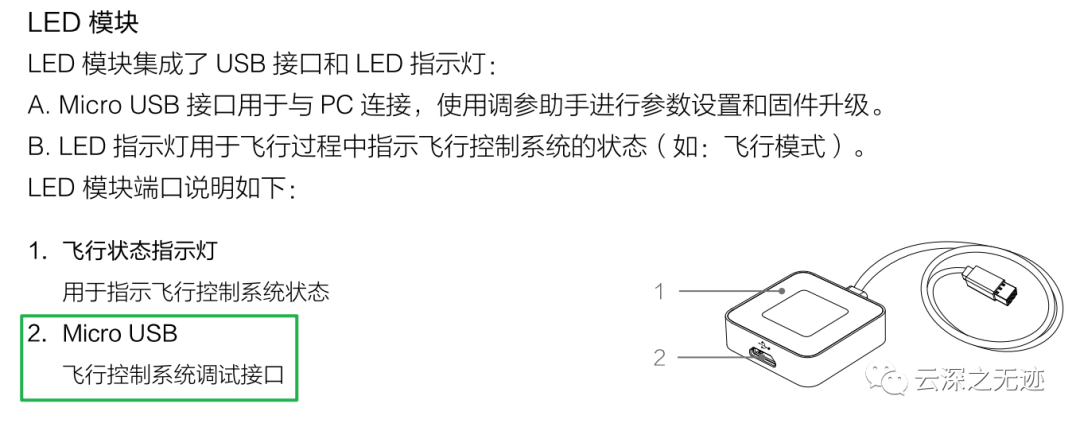
不是很理解和LED做一起是为什么
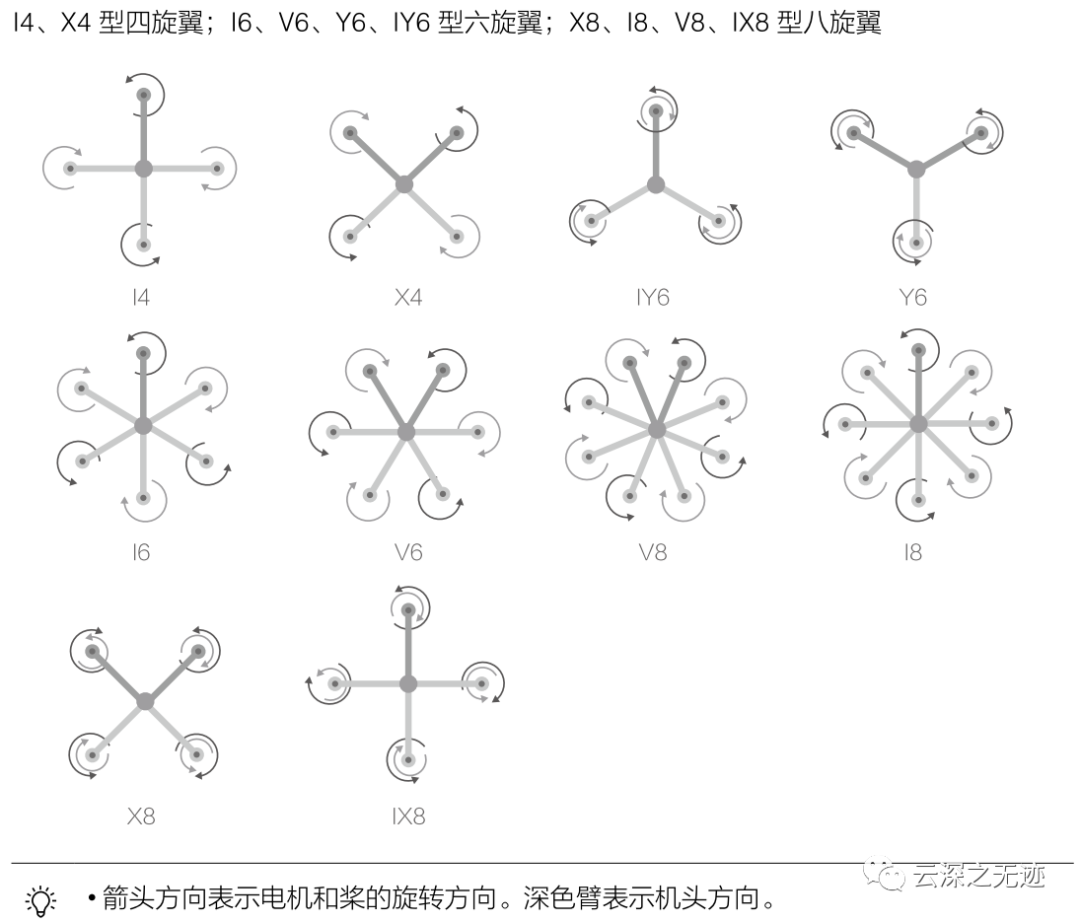
支持的几种飞行器类型
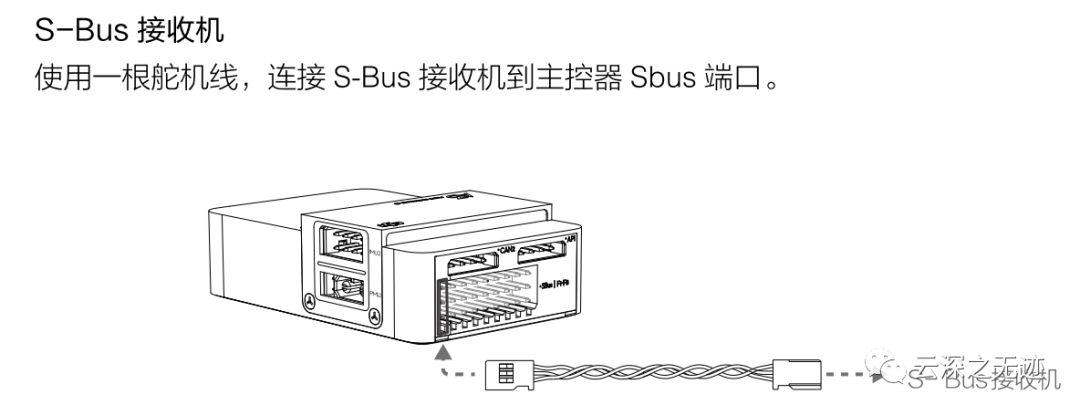
DJI别的太贵,搞个SBUS接收机就好了
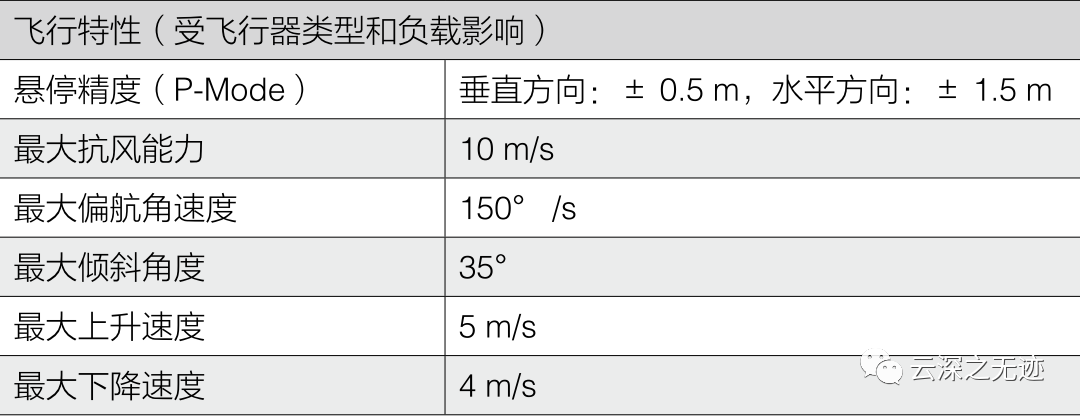
一个基本的动力参数
我这里还缺电池,今天先搞好需要的东西。
偷瞄
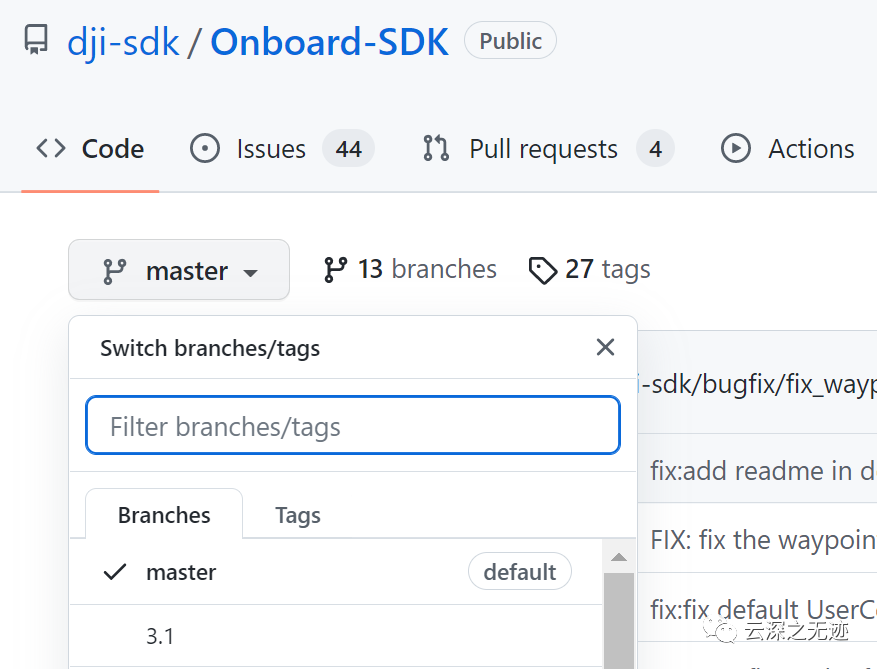
好像SDK得用老点得版本
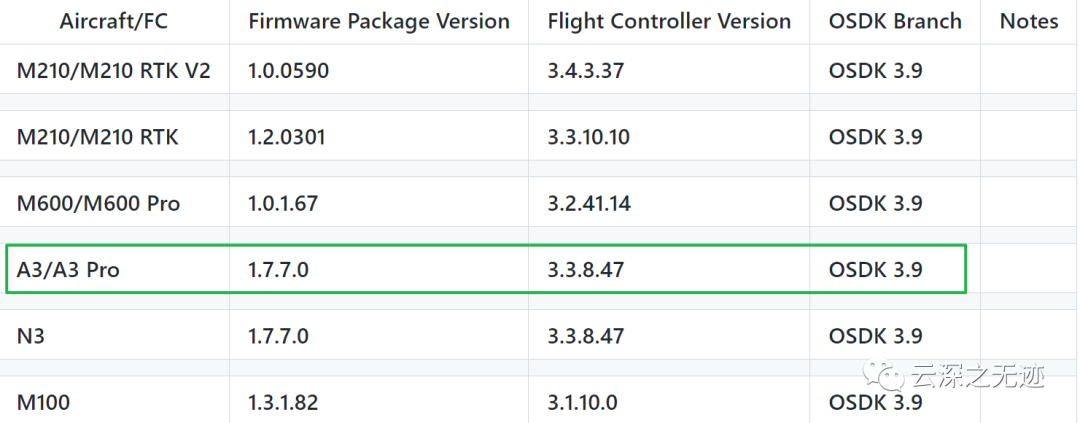
对,得用3的版本

明白了
OSDK的源码删除成这样就可以

然后记得看3的文档
那么,OSDK是什么?
OSDK 是一个用于开发无人机应用程序的开发工具包,基于OSDK 开发的应用程序能够运行在机载计算机上,开发者通过调用OSDK 中指定的接口能够获取无人机上的各类数据,经开发者设计的软件逻辑和算法框架,执行相应的计算和处理,生成对应的控制指令控制无人机执行相应的动作,实现如自动化飞行、负载控制和视频图像分析等功能。
DOC的话,就是这个了
SDK包括:
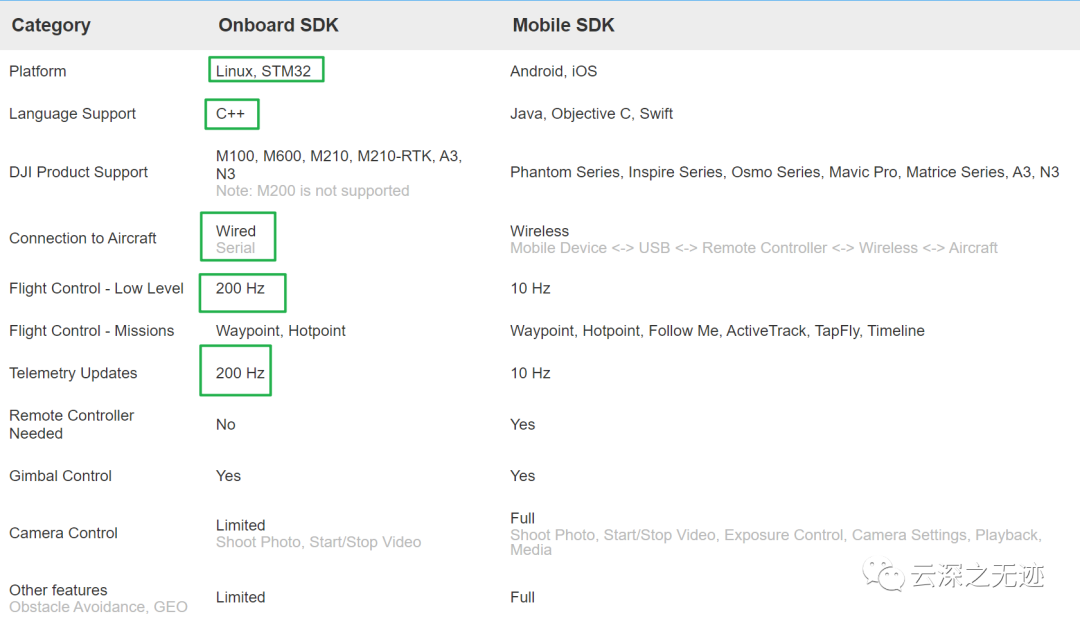
OSDK和MSDK之间也有一个比较
由于 Mobile SDK 用于地面应用程序,而 Onboard SDK 用于基于飞机的应用程序,这两个 SDK 可以在一个解决方案中同时使用。两个 SDK 都有 API,允许通过飞机的无线链路进行通信,因此可以在移动设备和机载计算机之间发送数据。
什么时候用OSDK?
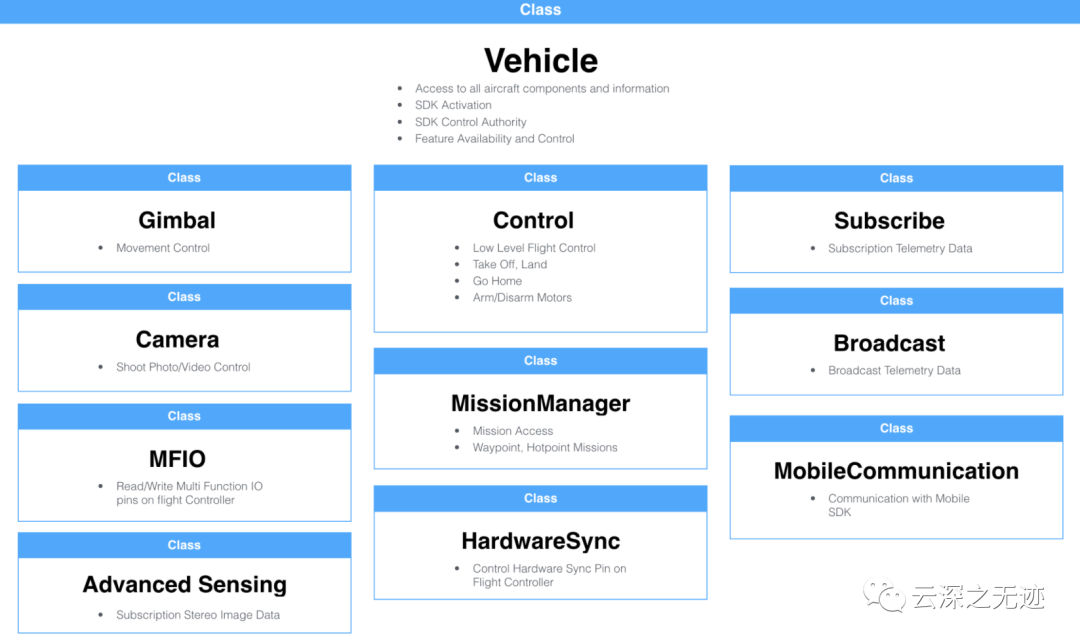
架构图
应用程序通过 DJI Onboard SDK 中的主 Vehicle 类访问 DJI 产品的功能,Vehicle 类用于管理 SDK(例如 SDK 激活),还提供对象来控制和接收来自产品的状态信息。
这个是控制控制飞控的串口连接口
懂得都懂,地平线板子拿出来
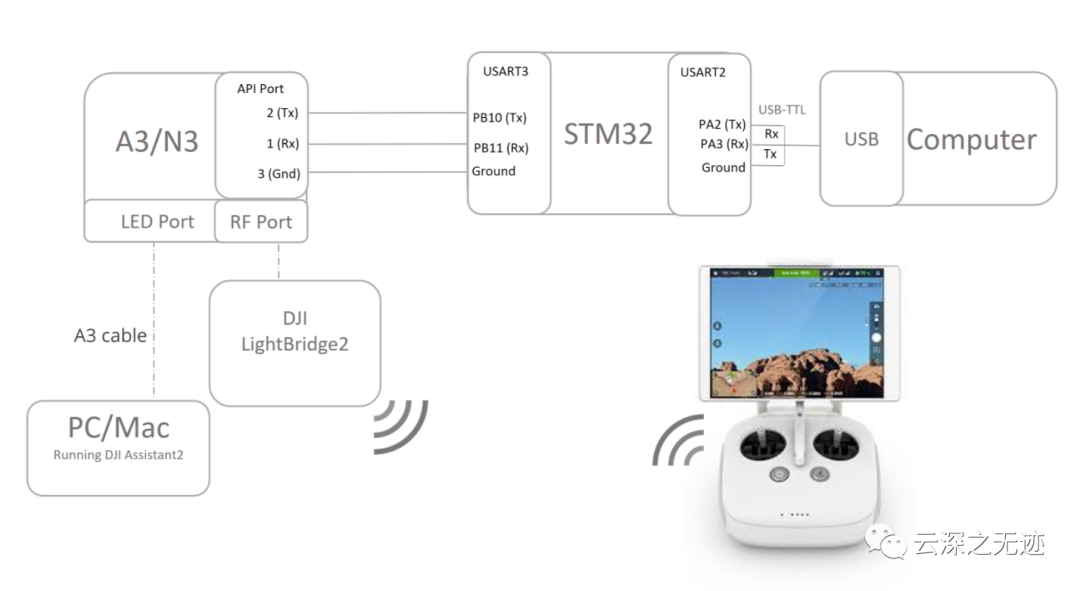
STM32也可以
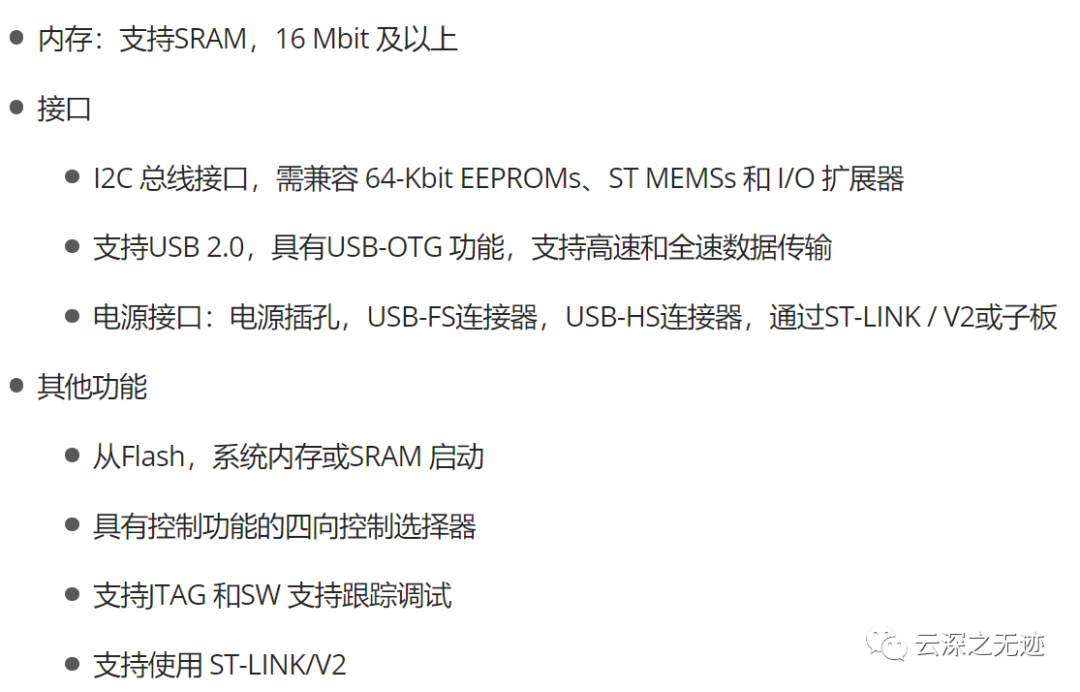
这个是STM32的配置要求

这次的酒店,先喷为敬(日用品不给了),嘤嘤嘤,没洗头膏了。。。
下班!回窝!
https://github.com/dji-sdk/Onboard-SDKhttps://github.com/dji-sdkhttps://www.dji.com/cn/a3?site=developer