

谢宇鹏 侯学隆王宗杰刘涛周伟荣
(海军航空大学,烟台 264001)
【引用格式】谢宇鹏,侯学隆,王宗杰,等.马赛克作战概念下多无人机网络化作战效率评估[J].战术导弹技术,2022(4):196-202.
DOI:10.16358/j.issn.1009-1300.20220109
 摘 要针对马赛克作战概念下的多无人机网络化作战效率评估问题,基于复杂网络理论,对多无人机在对抗条件下的作战网络结构、演化与重构问题进行了建模分析,重点对无人机作战网络重构与优化策略展开了深入剖析。研究结果表明,相比传统作战模式,经过每轮作战网络节点重构后,马赛克作战模式下的动态作战网络效率可能出现更为明显的下降趋势,也可能导致作战网络的平均路径增长。但通过作战网络的重构,无人机整体作战网络效率得到了有效提升。 关键词马赛克战;无人机;复杂网络;作战效率;信息机制;作战网络重构与优化;效能评估
摘 要针对马赛克作战概念下的多无人机网络化作战效率评估问题,基于复杂网络理论,对多无人机在对抗条件下的作战网络结构、演化与重构问题进行了建模分析,重点对无人机作战网络重构与优化策略展开了深入剖析。研究结果表明,相比传统作战模式,经过每轮作战网络节点重构后,马赛克作战模式下的动态作战网络效率可能出现更为明显的下降趋势,也可能导致作战网络的平均路径增长。但通过作战网络的重构,无人机整体作战网络效率得到了有效提升。 关键词马赛克战;无人机;复杂网络;作战效率;信息机制;作战网络重构与优化;效能评估
 ,将感知、决策和火力节点比率记为
,将感知、决策和火力节点比率记为 、
、 、
、 (对于不同类型的作战网络,可以调整各节点比例加以描述),于是三类节点数量
(对于不同类型的作战网络,可以调整各节点比例加以描述),于是三类节点数量 、
、 、
、 分别为
分别为 ,
, ,
, ,且满足
,且满足 ,将三类节点初始集合记为
,将三类节点初始集合记为 、
、 、
、 ;
; ,其中
,其中 ,
, =1,2,3分别代表传感、决策、火力三类节点类型,显然不考虑连接方向性时有
=1,2,3分别代表传感、决策、火力三类节点类型,显然不考虑连接方向性时有 ,当
,当 时,为同类节点连接概率;
时,为同类节点连接概率; ,其中,=1,2,3,代表三类节点类型;随机选取其他类型节点进行连接,当达到连接上限时,连接结束;
,其中,=1,2,3,代表三类节点类型;随机选取其他类型节点进行连接,当达到连接上限时,连接结束; | (1) |
 代表节点的匹配关系。
代表节点的匹配关系。 轮对抗的情形。这里用图
轮对抗的情形。这里用图 来描述其网络结构,可表述为
来描述其网络结构,可表述为 | (2) |
 、
、 、
、 分别为第
分别为第 轮对抗时感知、决策和火力节点的集合,对应节点数量分别记为
轮对抗时感知、决策和火力节点的集合,对应节点数量分别记为 、
、 及
及 ;
; 为节点之间的匹配关系集合,有
为节点之间的匹配关系集合,有 | (3) |
 、
、 、
、 分别为感知、决策和火力节点的匹配关系集合。
分别为感知、决策和火力节点的匹配关系集合。 通过决策节点
通过决策节点 向火力节点
向火力节点 传递信息时,将其过程记为
传递信息时,将其过程记为 ,其中
,其中 ,
, ,
, 。假设有
。假设有 个空余决策节点
个空余决策节点 、
、 个空余决策节点
个空余决策节点 ,定义节点连接的决策变量为
,定义节点连接的决策变量为 | (4) |
与节点不一定直接连接,也可以通过其他节点进行间接关联。对于决策节点,当给定感知节点,可以通过LS(label setting)算法求出信息传递的最短路径[14],记为 ;类似的,也可以通过LS算法求出到节点的最短路径,记为
;类似的,也可以通过LS算法求出到节点的最短路径,记为 。
。 | (5) |
 、
、 为中的任意节点。经决策节点后,将信息传递至火力节点的最短路径记为
为中的任意节点。经决策节点后,将信息传递至火力节点的最短路径记为 ,于是有
,于是有 | (6) |
,其经决策节点接收到感知节点信息的最短路径为 | (7) |
 | (8) |
 | (9) |
轮对抗演化到第 轮对抗的情形,将此时无人机的网络结构记为
轮对抗的情形,将此时无人机的网络结构记为 ,其中
,其中 、
、 、
、 分别为第轮对抗时感知、决策和火力节点的集合,对应数量
分别为第轮对抗时感知、决策和火力节点的集合,对应数量 为节点之间的匹配关系集合。对于传统的作战网络,此时动态、全局作战网络效率值分别为
为节点之间的匹配关系集合。对于传统的作战网络,此时动态、全局作战网络效率值分别为 、
、 。
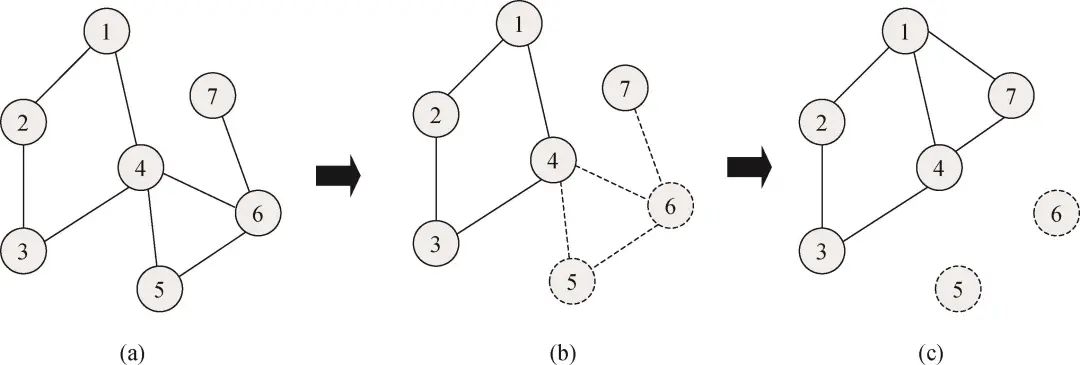
。 、连接(边)的修复概率
、连接(边)的修复概率 ;
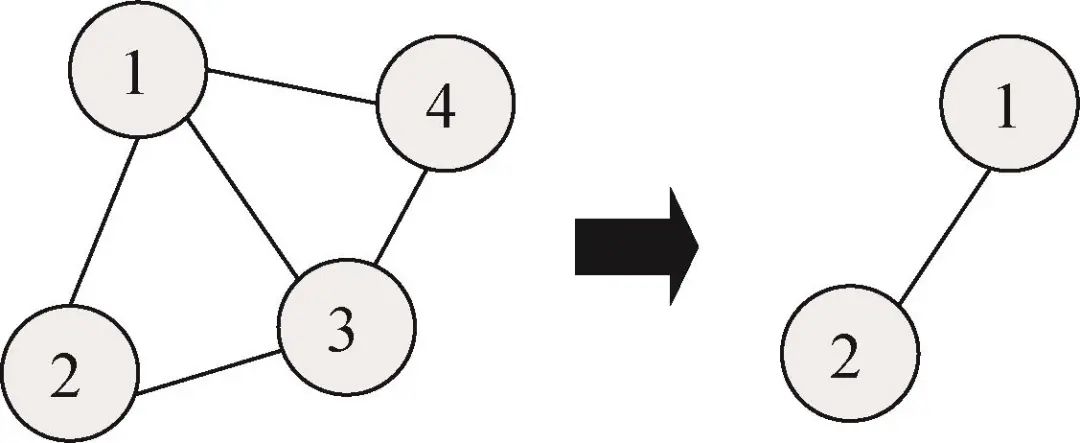
; 个节点,将与移除节点关联的边全部去除,更新当前剩余节点集合、、,以及匹配关系;,对于节点
个节点,将与移除节点关联的边全部去除,更新当前剩余节点集合、、,以及匹配关系;,对于节点 ,若当前其连接边数量
,若当前其连接边数量 小于火力节点最大连接边数
小于火力节点最大连接边数 ,将其置入集合
,将其置入集合 (初始为空);、,找出当前连接边数量小于此类节点最大连接数量
(初始为空);、,找出当前连接边数量小于此类节点最大连接数量 、
、 的节点,分别置入集合
的节点,分别置入集合 、
、 (初始为空);、、中节点数量,分别记为
(初始为空);、、中节点数量,分别记为 、
、 、
、 ,若其中任一值为0,说明当前作战网络不可重构,调整结束,否则,继续步骤(6);
,若其中任一值为0,说明当前作战网络不可重构,调整结束,否则,继续步骤(6); :
: | (10) |
 ,于是得到重构后的无人机作战网络,记为
,于是得到重构后的无人机作战网络,记为 | (11) |
)对无人机作战网络效能至关重要。这里主要考虑以下两种策略:时,分别从集合、、中分别取出、、个节点(不足则全取),对于每一类取出的节点,以设定的概率值 随机选取其他类型节点进行连接,当达到连接上限
随机选取其他类型节点进行连接,当达到连接上限 时,网络重构结束。
时,网络重构结束。 、
、 ,计算节点之间的最短路径,得到矩阵
,计算节点之间的最短路径,得到矩阵 ;、
;、 中任意节点的最短路径,得到矩阵
中任意节点的最短路径,得到矩阵 ;
; 、
、 ,建立决策变量矩阵
,建立决策变量矩阵 、
、 ,于是将作战网络重构问题转化为寻优问题,目标是使得重构后的
,于是将作战网络重构问题转化为寻优问题,目标是使得重构后的 值最小。规划模型为
值最小。规划模型为 | (12) |
 ,
, ,
, ,
, ;节点连接概率
;节点连接概率 ,
, ,
, ,
, ,
, ,通过以上参数随机生成作战网络。对抗参数设置:每轮随机移除节点数
,通过以上参数随机生成作战网络。对抗参数设置:每轮随机移除节点数 ,每轮可修复连接上限
,每轮可修复连接上限 ,修复成功概率
,修复成功概率 。分别考虑在传统作战模式(节点无修复功能)、马赛克随机修复模式、马赛克优化修复模式(每次修复时使作战网络效率值最大)三种情形,仿真结果分析如下:
。分别考虑在传统作战模式(节点无修复功能)、马赛克随机修复模式、马赛克优化修复模式(每次修复时使作战网络效率值最大)三种情形,仿真结果分析如下:
本文来源:《战术导弹技术》2022年第4期
