关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯
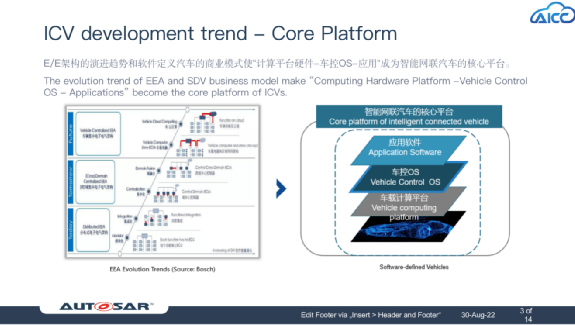
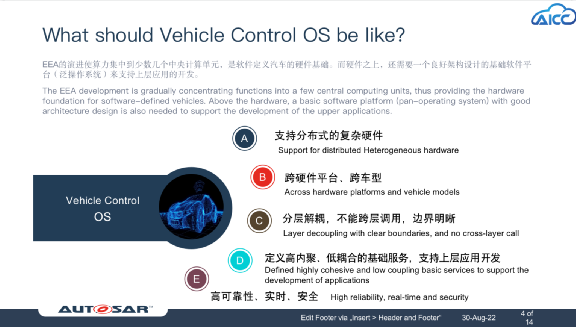
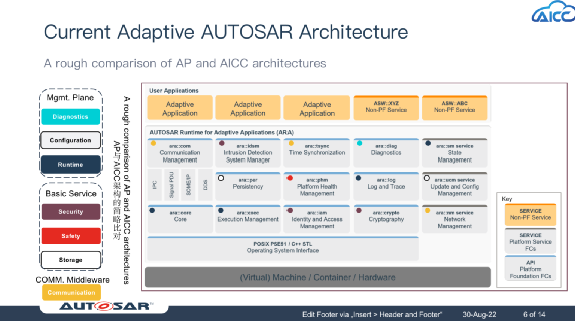
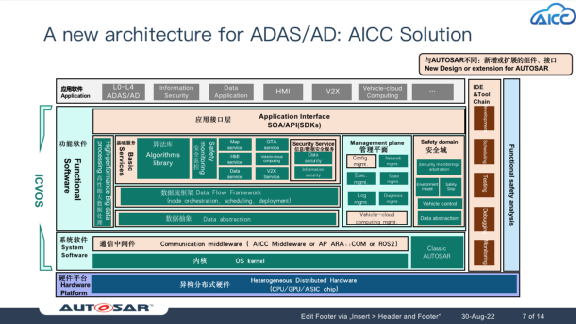
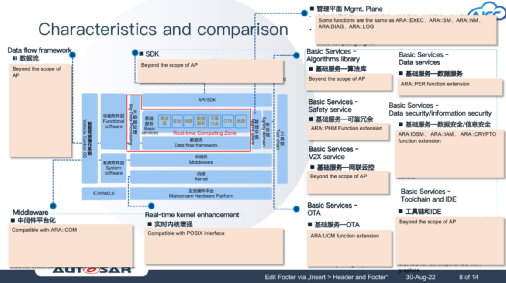
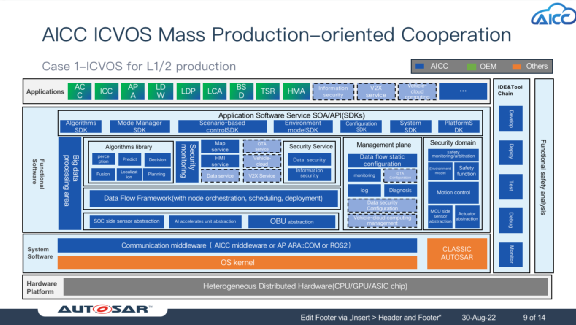
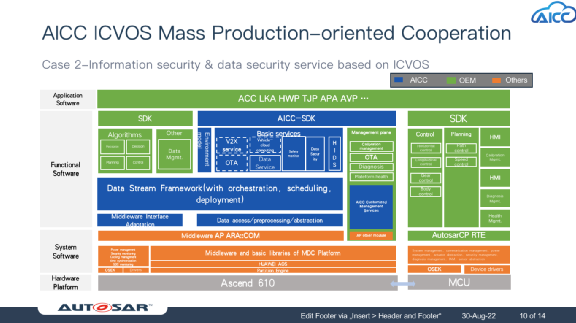
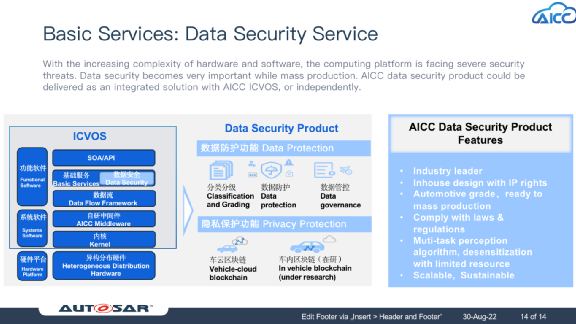
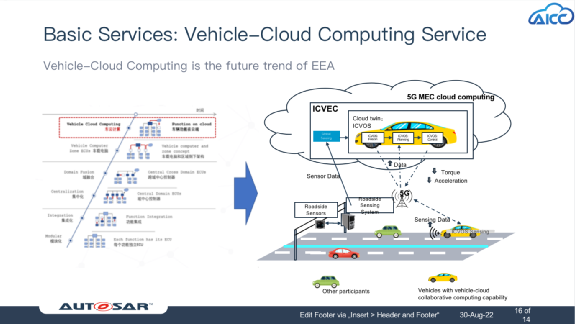
2022年8月5日,由盖世汽车、AUTOSAR组织联合主办的2022第三届软件定义汽车论坛暨AUTOSAR中国日活动中,CAICV基础软件工作组主席、国汽智控创始人兼CEO&CTO尚进聚焦软件定义汽车模式,对智能网联汽车的发展趋势、基于SOA理念的新ADAS/AD操作系统架构进行了详尽介绍。针对中国需求如何在AUTOSAR AP发展中起到更大作用,尚进表示:“中国的一定是世界的,世界的中国一定会欢迎!”以下为演讲内容整理:软件定义的核心一方面是架构,另一方面是基础软件,要做到软软解耦,即基础软件和应用的分层,这样才能实现软件定义。这就涉及如何向下平台化支持硬件,向上更好地对应用进行分级。今天的内容分为三方面,首先是智能网联汽车的背景,另外是中国在推动的一系列新标准和产业实践及其同AUTOSAR AP之间的相互比较,另外是数据安全和车云计算的基础服务。基础软件行业有一个词是缺芯少核,而在智能网联汽车领域,如果智能网联汽车的核,对自动驾驶、对域控制器没有起到直接支撑的作用,那就不能叫核。另外,在信息安全、数据安全以及车路云和云计算架构等智能网联汽车的关键问题中,如果基础软件不能起作用那也不能称作核。基础软件中,通讯、实时都很重要,且需要进一步扩展。如果基础软件同智能网联汽车应用没有结合,或者没有纳入应用共性,那么软件定义的落地将还有一段距离。今天我们很少谈云计算,但是谈架构。车用操作系统分为车载和车控,车载是座舱,车控分两部分,一部分是域控下的智能驾驶操作系统,另一部分是以AUTOSAR CP框架为主的传统安全操作系统,这里谈的是智能驾驶操作系统。这也正是因为我们在考虑AUTOSAR AP,包括CP、AP+CP标准,为了实现自动驾驶的落地,整体框架如何开展。此前AUTOSAR CP已经实现了对硬件的充分耦合,然而当前域控制器出现多芯、异构的形式,且逐渐呈现硬件平台化、软硬解耦的趋势。软硬解耦并不意味着软硬件没有关系,而是带来软硬优化。平台化,换言之即需要支持不同的芯片架构。不同芯片厂商生产的架构中,芯片组成、芯片数目都可能有所不同,这种差异反映到平台化的支撑,向上就一定要实现应用的解耦,其实这并非易事。基础软件应该如何实现软软解耦、帮助主机厂进行应用开发?毫无疑问是要提取共性。另外无论我们谈什么都离不开车规级,什么是车规级?高实时、高安全,还有高扩展和高安全。例如安全监控,如何做到SOC和MCU中的可靠冗余和安全保底、系统如何解决BUG保证系统方案,这些都属于基础软件的框架范畴。新的ADAS/AD架构:中国需求如何为AP添砖加瓦?对比AP和CP架构会发现两者有明显的不同。AP虽然在复杂性硬件和其他各不同状况下适用性都较好。但是L2辅助驾驶和L3、L4级自动驾驶的功能却没有体现。这是国汽智控智能驾驶操作系统ICVOS,是智能驾驶全栈操作系统基础软件。可以看到在定义整体框架时,最底层是异构硬件平台,跨平台支持多种不同传感器、执行器、硬件计算单元以及不同车辆平台,系统软件定义成内核和中间件。作为操作系统的内核,可以提供基本的操作系统服务,例如功能调度、文件系统、内存、接口等,中间件提供高性能的数据通信和服务。系统软件层还是以AUTOSAR AP、CP的框架为主,其中的自动驾驶域分为计算域、SOC和MCU。再上层是功能软件。从基础软件或者系统来看,它本身呈现出大CPU、多芯片的特点。在CPU内部跨节点、跨芯片做到实时、可靠、实现同传这些基本的功能,这一架构提供了一定的支撑。再往上走,应用层中自动驾驶、V2X、HMI的这些基础软件怎么支撑?要靠我们定义的功能软件,分为数据抽象、数据流框架、算法库三块内容。这些实际上都是为了实现两件事情,其一是高实时和高安全,第二是如何支持应用软软分离,如何支持主机厂差异化和定制化的功能,同时还能高效开发,支持硬件平台高效平滑切换,都将由基础软件实现。软件定义绕不开一件事情,所有厂商和供应链助力主机厂超过特斯拉,特斯拉的法宝是什么?最近提的是软件,也提到了OTA,什么是OTA,怎么做到OTA?首先要做到集中式开发,这样才能高效迭代功能。另外,整体产品一定要分成硬件、超系统和应用的形式。OTA更新实际上是在应用层,软件改了任何一行代码,没有经过测试谁也不能保证,但是有好的架构便能保证。这也是为什么在智能汽车时代,软件定义一切,基础软件的价值排在第一位,但这不是代码的价值,而是架构的价值。自动驾驶中,要对数据进行输入、感知、融合、决策规划、控制,它属于一个流系统,而不再是协同性的系统。我们经常说智能网联汽车的变革开始于自动驾驶,但不会终止于自动驾驶。自动驾驶从L2、L3等级发展到最后没有方向盘,将会进入一个平台期,当然这离我们还比较远。但智能汽车的发展会就此停下吗?AUTOSAR、基础软件,会止步于自动驾驶吗?当然不是。我们以自动驾驶为起点,推动域控架构、硬件操作系统发展,提升基础软件的架构,为应用服务。同时我们期望AUTOSAR能对自动驾驶进行进一步扩展,继续为域控开发做出贡献,其中的首要还是基础软件。这是我们与AUTOSAR AP的对比。在系统软件层,我们在其中可以看到AUTOSAR AP许多框架性概念的进一步落地,仍然围绕着AUTOSAR的内核,在软件上进行进一步扩展,同时提供更多算法、数据安全等方面的服务。毫无疑问,数据安全的功能实现以软件为主,其次是自动驾驶。但没有AUTOSAR标准,供应商怎么做?如何理解中国数据安全的准入?如何让数据安全的功能高实时、高可靠地和基础软件结合?我们目前我们正积极和AUTOSAR一同讨论,希望进一步共同推进相关产品和标准的落地。总体而言,我们的方案和AP对比,向下来看是基本一致的,而在功能软件之上有了进一步扩展。在实时数据流处理部分,一定会有向上的开发界面,和现在的标准接口相类似。它将更加强调SOA,面向基础软件输出服务,并提供自动驾驶、V2X的配置服务。这既是中国的标准,同时也是先行的产业实践落地。什么是中国标准和中国方案?先在中国落地,然后进一步支撑整个行业,而不是独有的,这就是中国方案。在这次中国电动汽车百人会上,汽车行业最高两个领导都提到了自动汽车的三大技术,操作系统、数据安全以及车路云或者车云计算。这是我们产业落地的一个Case,我们相当于是共建主机厂的操作系统。在这个产业链上,许多同行都觉得我们不约而同地变成了和客户竞争。想要解决这个问题,就会涉及到怎么建立新产业链。操作系统和应用中,应用是主机厂的天下,即便是操作系统的基础软件,也需要与主机厂共建。上图中绿色的部分就是我们和主机厂客户一同做的应用开发。上图是与另一家主机厂的合作,你们可以看到它的自主能力比较强。整体架构相类似,但在基础软件部分,主机厂的参与度很高。我们经常与主机厂合作,基于国标架构形成主机厂的车控OS。但同样的架构,除了智控的核心贡献,主机厂会根据不同能力做出不同的贡献。我们在产业实践中也发现,AUTOSAR CP永远是大家不可去掉的部分。我们在传统控制器的架构中保留了AP和CP的框架,基于CP框架进行开发,这也是主机厂能做应用开发的原因。数据安全和车云计算实际上与基础软件是强相关的。数据安全离不开自动驾驶,最大的数据在自动驾驶域,最大的数据处理能力也在自动驾驶域。虽然国家提出了数据安全准入,但我们主机厂问出了一个关键问题,产品在哪里?其实还没有正式的产品。另外,自动驾驶域一定会给数据安全带来很好的反馈,更好地助力监管。例如感知、融合、规划后产生的所有新数据都要进行数据安全管理。真正的市场一定是基础软件开发产生的新东西,例如自动驾驶的数据安全,作为基础软件的重要补充,既是市场需要的,也是技术、架构的挑战。我相信AUTOSAR一定会在这方面丰富扩展,我们中国也会积极参与,甚至希望能引领。软件定义模式一定会产生价值,但它不是嘴上说说而已,而是要思考在商业模式上该怎么实现。比如说提供几年的服务、如何提供软件升级、数据安全的库如何实现,这些都是我们需要思考的。这离不开应用设计,也离不开共用框架。最后是车路云。我们最近提到了智路OS,这其实就是车控OS的延伸。什么是车路云?中国市场大概保有2000万以上的乘用车,但在单价15万人民币以下的占50%,7-8万人民币以下的占30%-40%,这些车其实不会从一开始就做软件定义。再是软件定义时代,软件更新的速度远远超过硬件,然而车辆几乎不可能去做硬件预埋。那么软件怎么升级?云计算,这也是我们在推动的事情。在此前我们演示的车车协同和车云协同中,同样的基础软件运行在单车内和10公里内的机房,同时运行在距离20米的另外一辆车上,通过感知规划控制来协同计算。实现在10毫秒和20毫秒之间的跨平台通信,这就是我们所设想的,从EE架构扩展到单车物理边界。现在许多人都在提单车智能、网联赋能。中国目前的网联路线仍然是单车智能,但这里的“车”是虚拟车。什么是虚拟车?硬件能扩展,OS基础软件是大一统的基础软件,像云计算一样运用在不同平台,这就是云计算的EE架构。最后总结一下,软件定义是一个激动人心的时代,但要怎么把它变成现实?我们仍然要借鉴其他行业在软件定义中是怎么做的,并结合创新对其进行融合。但中国方案不是中国独有的,更是来推动AUTOSAR组织乃至全球行业的。毫无疑问,我们和AUTOSAR要保持紧密合作,中国的一定是世界的,世界的中国一定会欢迎。关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯