

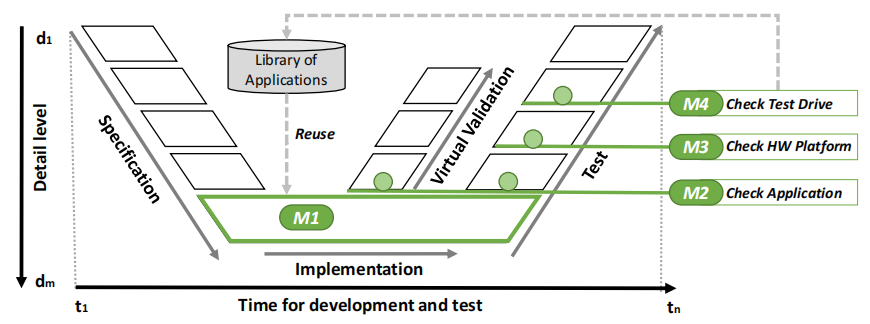
图 1. 标明测试阶段的V模型
在[7]中,作者使用三种常见的静态分析工具,对AUTOSAR软件组件的可测试性进行了研究。然而,他们只评估了有关C语言编程的常见错误,而没有评估与AUTOSAR配置有关的错误。因此,最近提出了专门为测试AUTOSAR项目设计的静态测试方法。 在教育背景下,为学习者提供一种简单易懂的方式来评估他们自己的表现或进步也很重要。此外,还需要一个指标来比较相互竞争的实施方案,以便选择应该被看好的解决方案进行进一步测试。因此,在本文中提出了一个在汽车软件工程教育背景下的AUTOSAR项目的静态分析方法。与一般用途的提示器一样,这种方法提供了质量指标和可能的错误检测,但以AUTOSAR特定的方式,使其对汽车领域的学习者和开发者更加有用。此外,还会根据检测到的问题提供纠正建议。本文展示了如何利用这些静态分析来评估和提高AUTOSAR项目的质量。


其结果是一个单一的值,它提供了一个简明的方法来快速评估AUTOSAR项目在标准一致性方面的质量。在下一节中,将展示如何使用一致性值和级别来提高资源利用率和开发人员在基于AUTOSAR的汽车开发和测试基础设施中的反馈。
IV.应用和用例

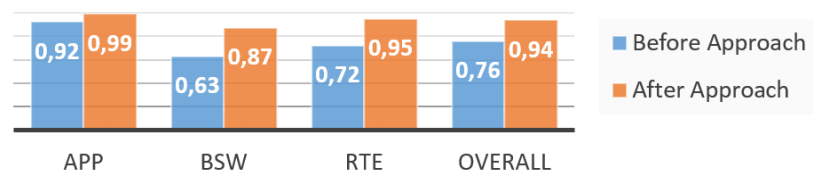
右边的条形图显示了运行静态分析后的CL值。可以看出,在开发过程中,不同架构层的组合获得了最大的改善。这一阶段对学生来说往往是一个挑战,因为它需要对整个标准有深刻的了解,包括其方法和异质的AUTOSAR工具链。
V.结论和未来的工作
参考文献:
[1] S. Mathur and S. Malik, “Advancements in the v-model,” International Journal of Computer Applications, vol. 1, no. 12, 2010.
[2] B. Hardung, T. Kölzow, and A. Krüger, “Reuse of software in distributed embedded automotive systems,” in Proceedings of the fourth ACM international conference on Embedded software - EMSOFT '04. ACM Press, 2004.
[3] K. Juhnke, M. Tichy, and F. Houdek, “Challenges concerning test case specifications in automotive software testing: assessment of frequency and criticality,” Software Quality Journal, nov 2020.
[4] N. Englisch, R. Bergelt, and W. Hardt, “An Educational Platform for Automotive Software Development and Test,” in 2020 IEEE 32nd Confer- ence on Software Engineering Education and Training (CSEE&T). IEEE, nov 2020.
[5] A. Leitner, R. Mader, C. Kreiner, C. Steger, and R. Weiss, “A development methodology for variant-rich automotive software architectures,” e & i Elektrotechnik und Informationstechnik, vol. 128, pp. 222–227, 2011.
[6] P. Louridas, “Static code analysis,” IEEE Software, vol. 23, no. 4, pp.58–61, jul 2006.
[7] A. Imparato, R. R. Maietta, S. Scala, and V. Vacca, “A comparative study of static analysis tools for AUTOSAR automotive software components development,” in 2017 IEEE International Symposium on Software Reli- ability Engineering Workshops (ISSREW). IEEE, oct 2017.
[8] I. Gomes, P. Morgado, T. Gomes, and R. Moreira, “An overview on the static code analysis approach insoftware development,” Faculdade de Engenharia da Universidade do Porto, Tech. Rep., 2009.
[9] R. van Megen and D. B. Meyerhoff, “Costs and benefits of early defect detection: experiences from developing client server and host applications,” Software Quality Journal, vol. 4, pp. 247–256, dec 1995.
[10] J. Westland, “The cost of errors in software development: evidence from industry,” Journal of Systems and Software, vol. 62, pp. 1–9, 2002.
[11] P. Vitharana, “Defect propagation at the project-level: results and a post-hoc analysis on inspection efficiency,” Empirical Software Engineering, vol. 22, no. 1, pp. 57–79, nov 2015.
[12] M. Kulenovic and D. Donko, “A survey of static code analysis methods for security vulnerabilities detection,” in 2014 37th International Con- vention on Information and Communication Technology, Electronics and Microelectronics (MIPRO). IEEE, may 2014.
[13] M. Courrier, H. Clergeau, A. Calvy, P. Favrais, and M. Lecat, “Autosar
bsw in real life: A summary of the last years starting and putting projects into production,” in Embedded RealTime Software and Systems (ERTS2012), Toulouse, France, Feb. 2012.
[14] N. Englisch, R. Mittag, F. Hänchen, O. Khan, A. Masrur, and W. Hardt,
“Efficient Static Testing of AUTOSAR Software supported by an auto- matically created Knowledge Base,” in Proceedings of the 7th Conference on Simulation and Testing for Vehicle Technology, May 2016, pp. 87–97.
[15] H. Venkitachalam, K. A. Powale, C. Granrath, and J. Richenhagen,
“Automated Continuous Evaluation of AUTOSAR Software Architecture for Complex Powertrain Systems,” in INFORMATIK 2017, 15. GI Work- shop Automotive Software Engineering, M. Eibl and M. Gaedke, Eds. Gesellschaft für Informatik, Bonn, 2017, pp. 1563– 1574.
[16] D. Diekhoff, “AUTOSAR Basic Software for Complex Control Units,” in
Proceedings of the Conference on Design, Automation and Test in Europe, ser. DATE ’10. 3001 Leuven, Belgium, Belgium: European Design and Automation Association, 2010, pp. 263–266.
[17] N. Englisch, A. Heller, U. Tudevdagva, J. Tonndorf-Martini, L. Gaitzsch,
and W. Hardt, “Adaptive Learning System in Automotive Software Engineering,” in Proceedings of the 27th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), 2019.
[18] N. Englisch, F. Hänchen, F. Ullmann, A. Masrur, and W. Hardt,
“Application-Driven Evaluation of AUTOSAR Basic Software on Modern ECUs,” in Proceedings of the 13th IEEE/IFIP International Conference on Embedded and Ubiquitous Computing (EUC), October 2015, pp. 60– 67.
[19] N. Englisch, O. Khan, R. Mittag, F. Hänchen, A. Heller, and W. Hardt,
“YellowCar Automotive MultiECU Demonstrator Platform,” in 15. GI Workshop Automotive Software Engineering, 2017, pp. 1517– 1522.
分享不易,恳请点个【👍】和【在看】
