

点击左上方蓝色“一口Linux”,选择“设为星标”
想要在Linux板子上通过Qt界面来播放视频,一种可选的方式是调用FFmpeg库来实现视频的解码与播放。本篇先来进行FFmpeg库的交叉编译,将FFmpeg库移植到Linux板子上。
FFmpeg需要用到x264库,需要先编译这个库。
官网http://www.videolan.org/developers/x264.html下载x264的源码
然后解压,并进行配置
#解压
tar -xvf x264-master.tar.bz2
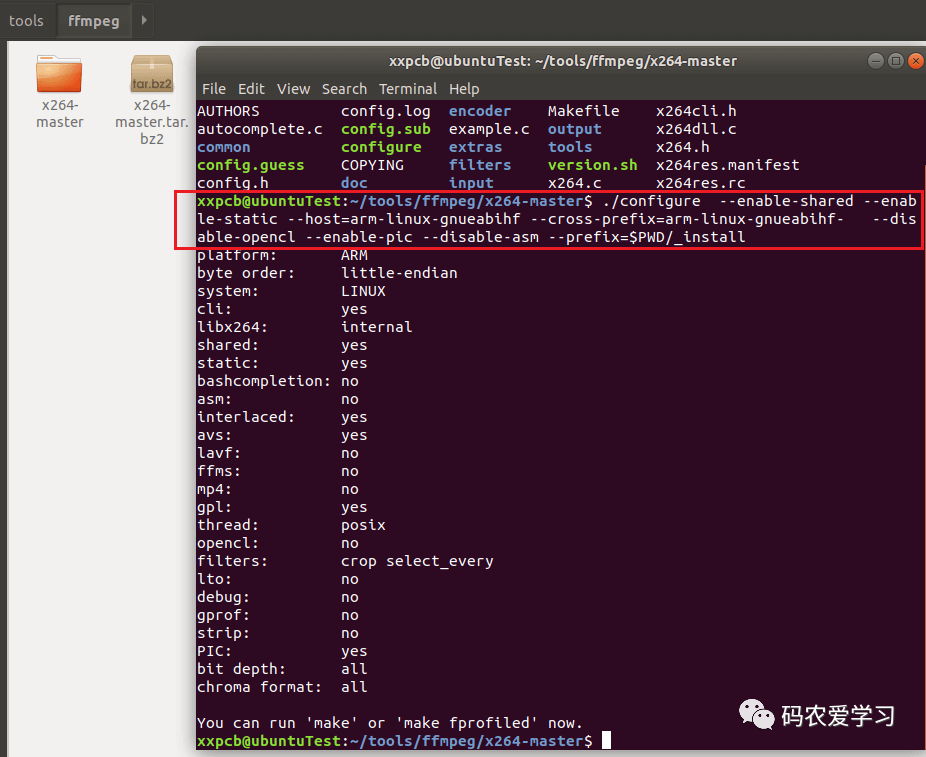
#进入源码目录, 进行配置
./configure --enable-shared --enable-static --host=arm-linux-gnueabihf --cross-prefix=arm-linux-gnueabihf- --disable-opencl --enable-pic --disable-asm --prefix=$PWD/_install
一些参数说明:
然后进行编译
make
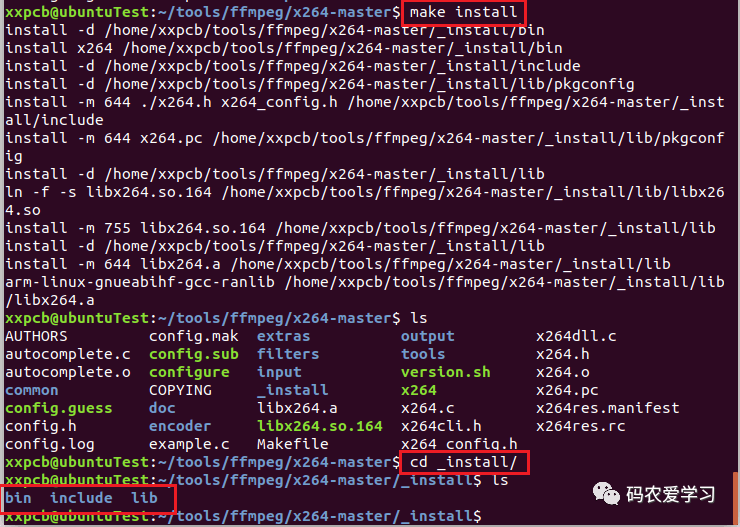
make install
查看文件夹_install,可以看到生成的bin、include、lib子目录
然后编译FFmpeg,官网下载地址:http://ffmpeg.org/download.html
同样是进行解压
tar -xvf ffmpeg-snapshot.tar.bz2
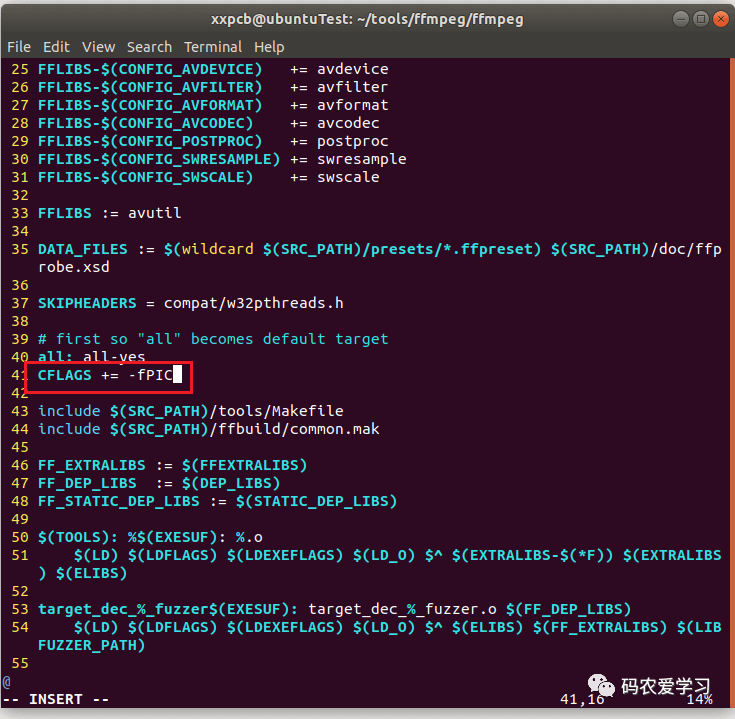
进入ffmpeg源码目录,修改Makefile,添加编译选项:CFLAGS += -fPIC
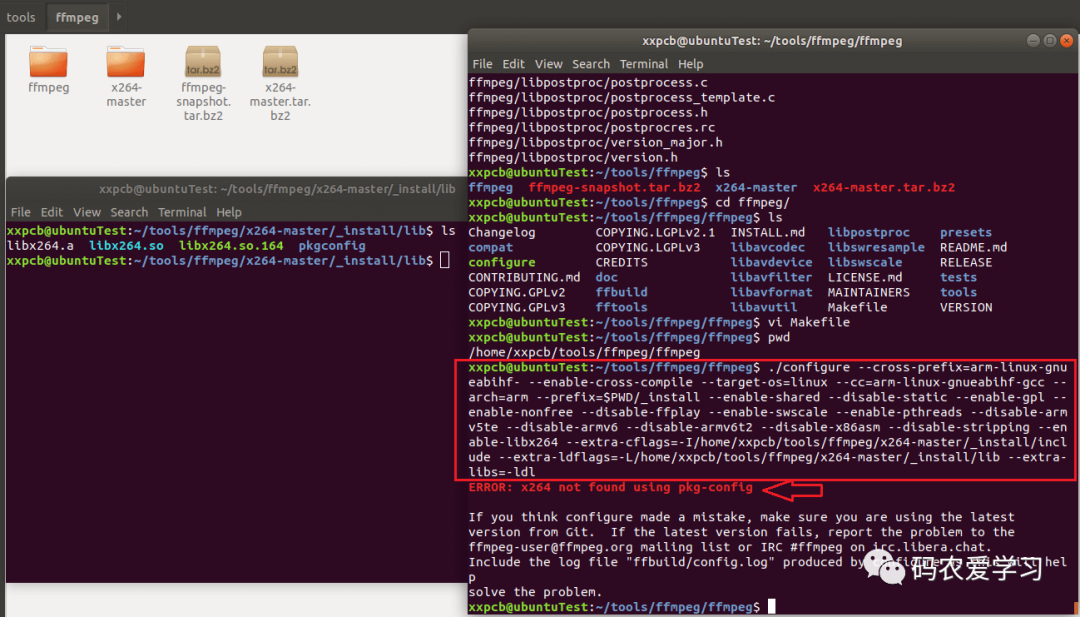
然后进行配置
./configure --cross-prefix=arm-linux-gnueabihf- --enable-cross-compile --target-os=linux --cc=arm-linux-gnueabihf-gcc --arch=arm --prefix=$PWD/_install --enable-shared --disable-static --enable-gpl --enable-nonfree --disable-ffplay --enable-swscale --enable-pthreads --disable-armv5te --disable-armv6 --disable-armv6t2 --disable-x86asm --disable-stripping --enable-libx264 --extra-cflags=-I/home/xxpcb/tools/ffmpeg/x264-master/_install/include --extra-ldflags=-L/home/xxpcb/tools/ffmpeg/x264-master/_install/lib --extra-libs=-ldl
一些参数说明:
我这里配置后报错,如下:
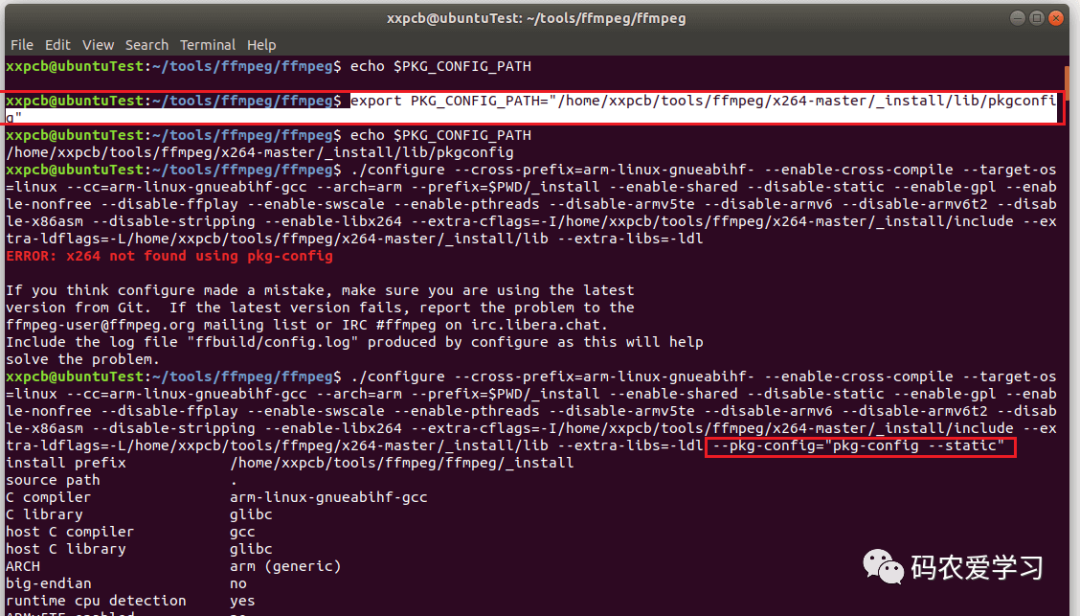
尝试将PKG_CONFIG_PATH变量进行配置:
export PKG_CONFIG_PATH="/home/xxpcb/tools/ffmpeg/x264-master/_install/lib/pkgconfig"
实际测试无效,还是报错:
参考这个帖子:
https://stackoverflow.com/questions/51918409/compiling-ffmpeg-x265-not-found-using-pkg-config/63661853
在配置项增加一条:
--pkg-config="pkg-config --static"
完整的配置项如下:
./configure --cross-prefix=arm-linux-gnueabihf- --enable-cross-compile --target-os=linux --cc=arm-linux-gnueabihf-gcc --arch=arm --prefix=$PWD/_install --enable-shared --disable-static --enable-gpl --enable-nonfree --disable-ffplay --enable-swscale --enable-pthreads --disable-armv5te --disable-armv6 --disable-armv6t2 --disable-x86asm --disable-stripping --enable-libx264 --extra-cflags=-I/home/xxpcb/tools/ffmpeg/x264-master/_install/include --extra-ldflags=-L/home/xxpcb/tools/ffmpeg/x264-master/_install/lib --extra-libs=-ldl --pkg-config="pkg-config --static"
这次配置成功了:
然后进行编译
make
make install
查看文件夹_x264_install,可以看到生成的bin、include、lib、share子目录
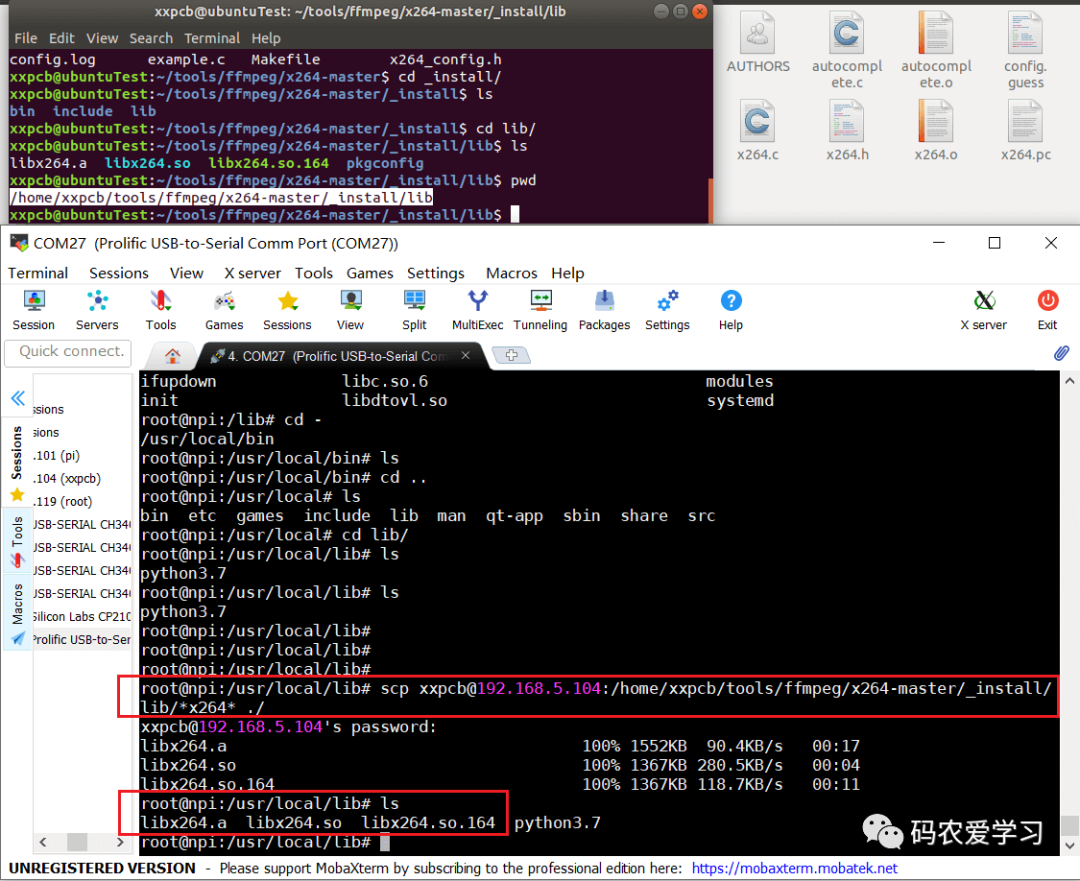
复制x264-master的lib目录中的x264库文库到开发板的/usb/local/lib目录
复制ffmpeg的lib目录中的so库文库到开发板/usb/local/lib目录
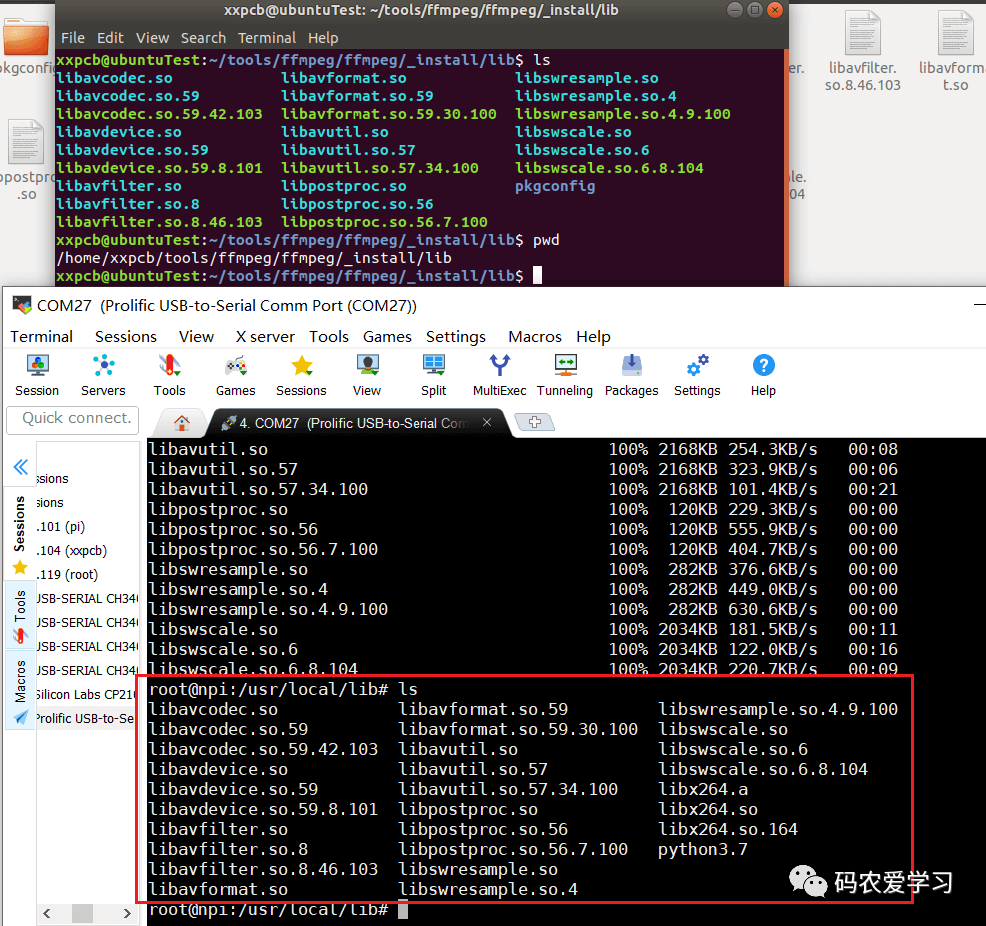
复制ffmpeg的bin目录中的ffmpeg文库到开发板/usb/local/bin目录
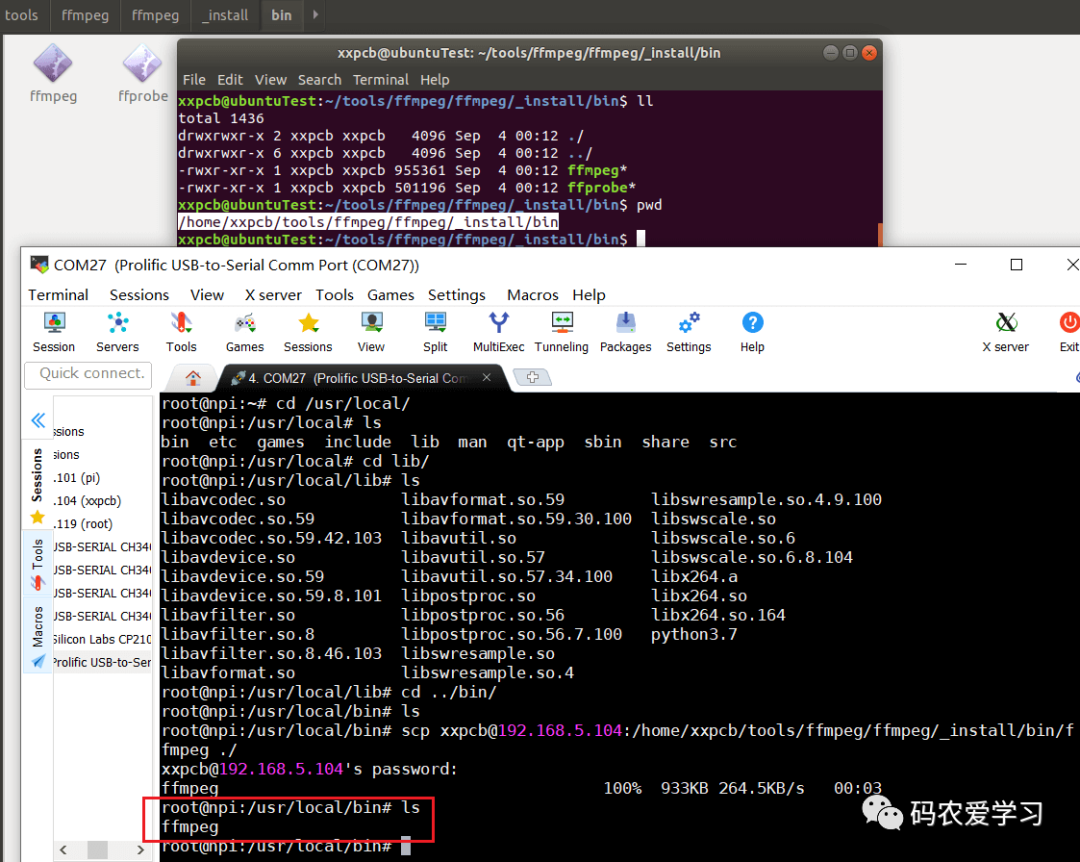
我使用的是SSH的方式进行复制的,具体命令如下:
scp xxpcb@192.168.5.104:/home/xxpcb/tools/ffmpeg/x264-master/_install/lib/*x264* ./
scp xxpcb@192.168.5.104:/home/xxpcb/tools/ffmpeg/ffmpeg/_install/lib/*so* ./
scp xxpcb@192.168.5.104:/home/xxpcb/tools/ffmpeg/ffmpeg/_install/bin/ffmpeg ./b
SSH复制有点慢,可以尝试其它复制方式。
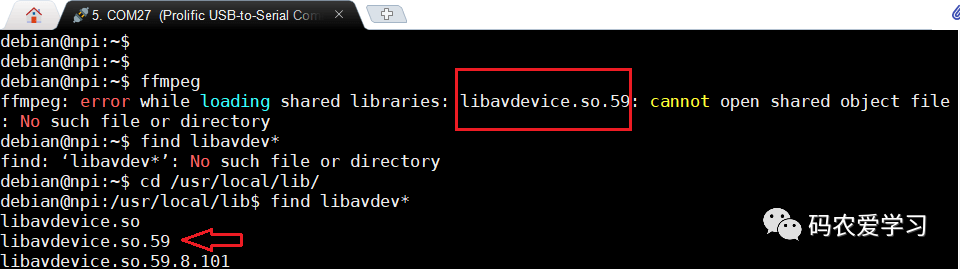
先输入ffmpeg,看下是否能找到这个程序,我这里有报错,提示找不到对应的库(实际上是有这个库的):
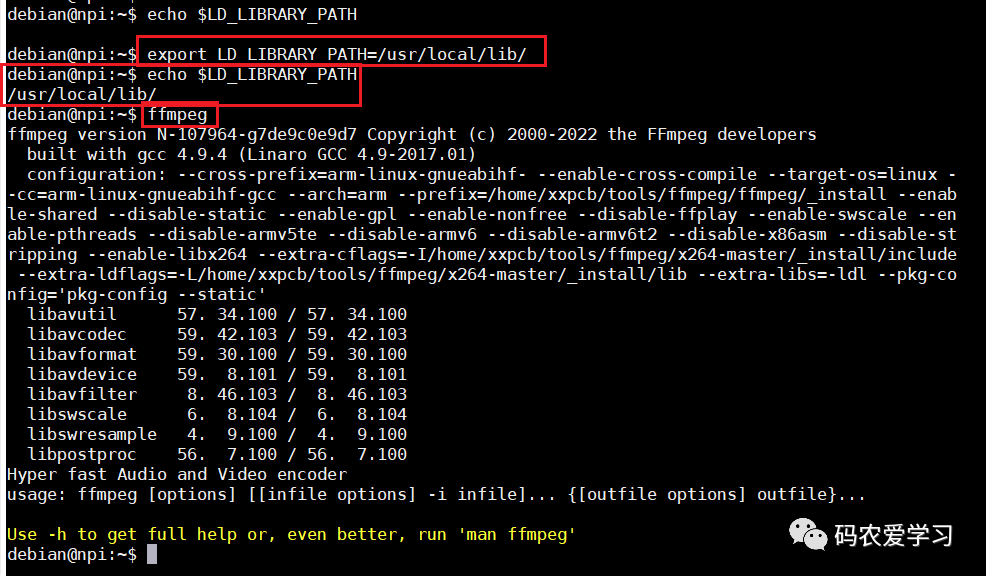
添加LD_LIBRARY_PATH变量,并导出
export LD_LIBRARY_PATH=/usr/local/lib
再次输入ffmpeg,没有报错了:
通过ffmpeg指令测试视频播放
#播放板子中自带的视频
ffmpeg -i mixkit_river.mp4 -pix_fmt rgb565le -f fbdev /dev/fb0 -f hw:0,0
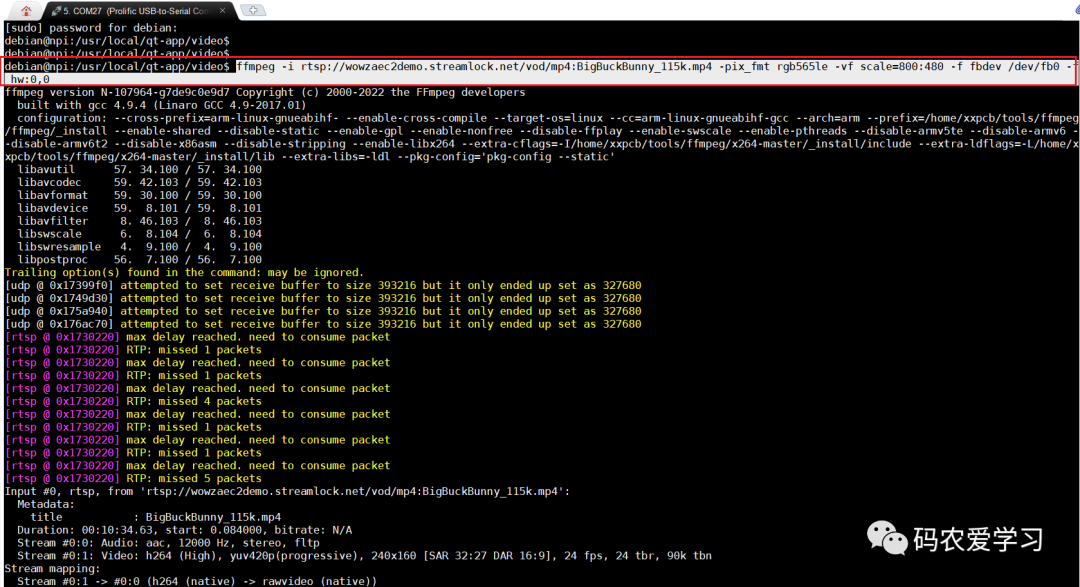
#播放网络视频
ffmpeg -i rtsp://wowzaec2demo.streamlock.net/vod/mp4:BigBuckBunny_115k.mp4 -pix_fmt rgb565le -vf scale=800:480 -f fbdev /dev/fb0 -f hw:0,0
指令输入后的打印如下:
这个是播放效果的截图:

本篇介绍了嵌入式Qt播放视频的准备工作:交叉编译FFmpeg库并移植到Linux板子中,并先通过ffmpeg指令测试视频播放效果。下篇将尝试设计Qt界面来结合FFmpeg进行视频的播放。
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐
