本文引用格式
陈伟,刘猛,王永召,等.水下PNT体系之声学导航定位技术应用展望[J]. 导航定位与授时, 2022, 9(4): 7-16.
水下PNT体系之声学导航定位技术应用展望
陈伟1,2,刘 猛1,王永召1,周贤高1
(1.天津航海仪器研究所,天津 300131;2.中国船舶航海保障技术实验室,天津 300131)
摘 要:声学导航技术是水下PNT体系的重要组成部分,也是水下PNT建设的一种有效增量手段,应充分利用中高频声学导航技术的隐蔽性和精确性,以及低频声学导航技术的广域性,满足水下用户对水下导航定位能力的隐蔽性、广域性以及精确性需求,有效促进水下导航定位服务能力的持续提升。从水下应用需求出发,研究了声学导航的任务剖面、边界条件和融合方式等,明确其在水下应用的优越性与局限性,最后对我国未来声学导航技术水下应用提出了建议。
关键词:水下PNT;声学导航;中高频声学导航;低频声学导航
随着我国 “海上丝绸之路”和“海洋强国”等国家战略的实施,海底资源勘探、深远海资源开发、海洋观测与科学考察、海洋考察与海底打捞等国民经济建设活动以及水下有人/无人平台遂行多样化任务,将对水下定位、导航和授时(Position, Navigation and Timing,PNT)服务能力提出越来越迫切的要求[1-3]。
水下环境中,声波是海洋介质中唯一能远距离稳定传播的信息载体[4-5]。声波属于纵波,其在水下的传输距离要比无线电波远得多,水声定位将更适合为水下潜航器提供定位服务[6-8]。此外,水下各项导航定位手段中,除了惯性导航、多物理场匹配导航等自主导航系统,水声导航技术也是目前可投入实际使用的一种水下导航定位技术手段[9-12]。因此,声学导航定位技术是水下PNT建设的重要组成部分,本文针对水下PNT体系之声学导航技术的水下应用进行分析,从用户需求出发,研究水下PNT声学导航定位技术的任务剖面、边界条件和融合方式等,明确其在水下应用的优越性与局限性,最后对我国未来声学导航技术水下应用提出了建议。
声学定位导航技术的研究始于20世纪50年代,国外的水声定位技术比较成熟,已经实现水声定位系统的产品化、产业化、系列化[13]。目前,以美国、俄罗斯为代表的军事强国在水声定位发展方向取得了飞速的进步,均建设了各自的水下声学校准系统,有效解决了潜航器水下航行精度校准问题,提高了其水下隐蔽航行时间。2010年,美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DA-RPA)立项开展深海导航定位系统(Positioning Sys-tem for Deep Ocean Navigation, POSYDON)研究,通过在目标海底布放若干声信号源,潜航器通过测量待测点到这些信号源的绝对距离,获得持续、精确的定位。利用该技术,潜航器无需浮上水面寻求全球定位系统(Global Positioning System,GPS)定位,可最大限度地降低被探测的风险[14-16]。
2016年12月,据莫斯科《消息报》报道,俄罗斯大洋仪器公司研制了独一无二的导航和通信系统定位器,可使水下无人器根据声纳浮标信标定位,并且不久将在俄罗斯北极大陆架海底部署[17]。该系统由自动无人水下装置、带有信使D1M卫星通信和格洛纳斯导航设备的声纳浮标组成。水下机器人可以根据在海底的声纳浮标信标定位,巡逻深达8km的地区。在浮标上设有高精度坐标,水下无人器在收到这些坐标信息后,可以确定自己的位置,浮标也可用于向水面发送信息。2021年3月,俄罗斯3艘核潜艇几乎同时在半径300m范围内的北极地区破冰而出,展现了强大的水下定位导航能力。声学导航已经成为水下PNT的一种重要技术手段。依据声波传输的频率特性,可以分为中高频声学导航(几十kHz~上千kHz)和低频声学导航(小于1kHz)。
中高频声学导航方面,当前以法国、挪威、英国为代表的国外公司研制的水下声学定位系统产品的最大定位距离约为10km,定位精度为作用距离的0.15%~1.0%[9,18-19]。例如,美国LinkQuest公司推出的TrackLink系列,集成了超短基线声学定位系统和高速水声通信系统,该系列的定位精度分成三档:斜距的0.3%、斜距的2%和斜距的5%,斜距测量精度为0.2m或0.3m。该系列产品最大作用距离可达11000m。国内的水下定位技术发展起始于20世纪70年代末,经过几十年的努力,目前取得了较大的成果。以哈尔滨工程大学、中国科学院声学研究所和中船重工第七一五研究所为代表的声学定位系统,作用距离通常也为10km左右量级,定位精度为作用距离的0.2%~1%[19-20]。例如,原国家海洋局第一海洋研究所与哈尔滨工程大学共同开发研制的长程超短基线定位系统,2006年5月在中国南海进行了长距离深水定位试验,最大作用距离可达8.6km,工作水深超过3700m,定位精度可以达到斜距的0.2%~0.3%,并且具有水下目标动态跟踪功能。
低频声学导航方面,深海远程低频声学导航定位试验和研究结果尚未见相关报道。但深海低频远程水声通信技术研究手段相对较为成熟,日本、美国和俄罗斯等国竞相开展了原理和应用研究,海试结果达到数百乃至千km[21-22]。2010年[23],日本海洋研究开发机构在日本伊豆诸岛和小笠原群岛南部4000m深海海域开展远程水声通信试验,通信距离300km,数据传输率14bit/s;2012年[24],其利用法国iXBlue公司设计和制造的一种新型声源,通信距离达到1000km。2010年9月[25],美国Scripps海洋研究所在加利福利亚南部进行深海远程水声通信试验,海深4500m,通信距离550km时通信速率达到15bit/s,通信距离700km时通信速率达到7.5bit/s。2011年4月[26],美国海军实施了代号为ICEX-2011的军事演习,高调推出深海汽笛(DeepSiren)低频远程水声通信系统。该系统在北冰洋深海信道的通信距离达到150n mile,水声通信速率为15bit/s。国内,中国科学院声学研究所于2006年4月开展远程通信试验,最远通信距离超过150km。中船重工第七一五研究所以深海声道作为远程通信系统的主波导,收发节点均位于声道轴附近,开展了水平距离500km的声学通信。2013年7月,中国科学院声学研究所在国内首次实现了千km级的深海远程实时水声通信。
综上,目前国内外关于远程通信技术的研究手段较为成熟,能够在几十km和几百km实现低误码率传输。中高频声学导航定位技术也相对成熟,但其最大作用距离均在10km左右量级,而深海低频远程水声导航定位技术则仍处于起步阶段。
用户需求是系统设计的依据和输入,不同用户对水下PNT技术的需求侧重点存在差异。针对水下PNT声学导航技术在水下的应用,将从用户需求出发进行分析。根据水下用户遂行任务的差异,可以大致分为军用水下有人平台、水下无人平台以及民用用户等三类。
公开报道以潜艇为代表的军用水下有人平台通常活动在0~500m水深范围内,具有活动范围广、隐蔽性好等特点,在未来作战中担负着核威慑、二次核打击及为航母编队护航等重要任务。依据我国国家发展战略和国防白皮书确定的“2025年前实现由近海防御型向远海护卫型转变,2035年前基本实现现代化,本世纪中叶前全面建成世界一流海军”的发展思路,我国水下导航技术的发展应以巩固近海防御力量,提升远海作战保障能力,以提高隐蔽长航时精确导航能力为重点,要求具有完备的远海海域时空基准信息和航海导航保障能力。
随着无人技术的深化发展,水下无人平台的作战能力范围不断拓展,在海上作战应用越来越广泛和重要,逐步覆盖海上警戒、侦察、通信、打击、评估等领域,担负着警戒巡逻、侦察监视、通信中继、电子对抗、作战攻击、毁伤评估、反潜、反水雷等重要任务。水下无人平台通常活动在0~5000m水深范围内,具有作战使用灵活、综合作战效益高、适用于危险环境、人员伤亡率低、全寿命费用低等显著特点;其作为海基作战力量水下“千里眼”和“长手臂”,将要求活动于更广阔的水下空间,对水下PNT的需求更加关注广域覆盖能力。
随着我国海洋开发和科考活动的持续发展,在全球海域开展各类海洋观测、水下工程建设、科学考察等将成为常态,包括海上搜救、油气资源勘探、考古打捞、水下观测等在内的深远海经济活动的频度将呈现爆炸式增长。针对深远海工程建设、资源勘探与开发、海洋科学研究、灾害监测等民用领域的深远海经济活动,通常活动在0~5000m水深范围内,其对水下导航定位的精度要求相对较高,需要将位置信息与精确海底坐标对比,精度要求高达亚米级,与卫导伪距差分定位精度相当。
综上,军用水下有人平台要求具备500m以下的水下PNT能力,侧重于隐蔽性需求;水下无人平台作为有人平台的水下“千里眼”和“长手臂”,要求具备大范围内的水下PNT能力,更侧重于广域性需求;民用领域的深远海经济活动则要求具备全海深的水下PNT能力,更侧重于精确性需求。
水下PNT声学导航定位的作用距离以及导航精度与其声学设备工作频段有直接关系。声学导航设备的定位精度与其工作频率成正比,而作用距离与其工作频率成反比。此外,由于海洋环境的非均匀声学介质特性,导致海洋内部声速场的不均匀性,将造成水声在传播过程中出现声线弯曲。特别是,声信号远程传播过程中,在声线弯曲以及海洋环境不均匀散射体对声信号的反射与折射作用下,将会改变声信号传播方向,出现声线反转现象。因此,关于水下PNT声学导航技术体制特性分析,将针对中高频近程声学导航技术和低频远程声学导航技术分别进行研究,通过分析声学导航技术的任务剖面、边界条件和融合方式等,明确其在水下应用的优越性与局限性。
表1所示为水声定位导航工作频段划分及性能对应表[27-29]。设备工作频率越低,作用距离越远,定位精度越差,设备规模较大;声学导航设备工作频率越高,作用距离越近,定位精度越高,设备规模较小。图1和图2所示分别为30kHz和500Hz工作频率的声学导航水下传播损失图。30kHz中高频声学导航的传播损失很大,在6km外的传播损失高达120dB;而500Hz低频声学导航具有较小的传播损失,在300km处仍具有良好性能。因此,中高频声学导航设备的作用距离相对较近,通常仅有几km到几十km左右。针对导航精度要求较高的场景,则可以适当地减小作用距离,采用更高工作频率,以满足水下用户对PNT导航精度的需求。
表1 水声导航定位频段划分及性能对应表
Tab.1 Frequency division of acoustic navigation and positioning with corresponding performances
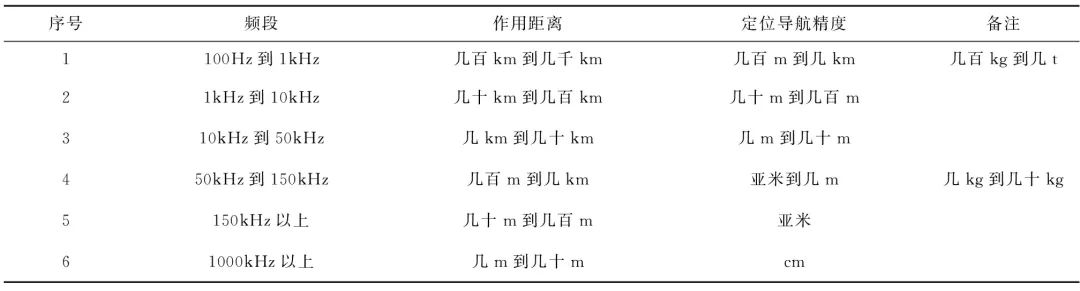
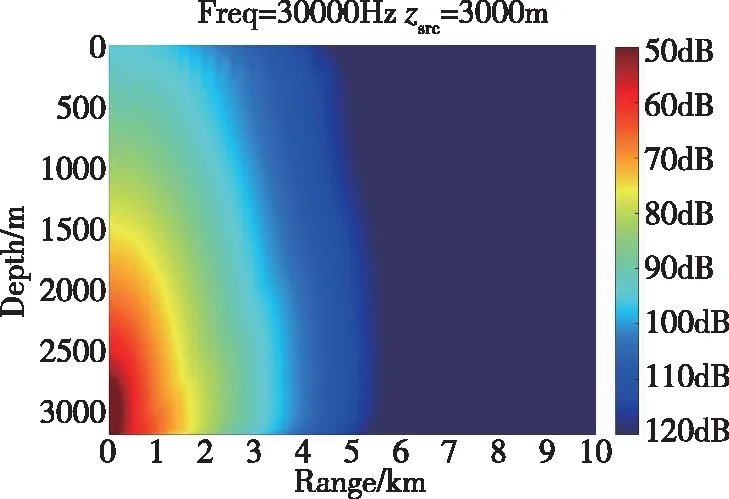
图1 30kHz声学导航水下传播损失
Fig.1 Loss of underwater transmission for acoustic navigation with 30kHz
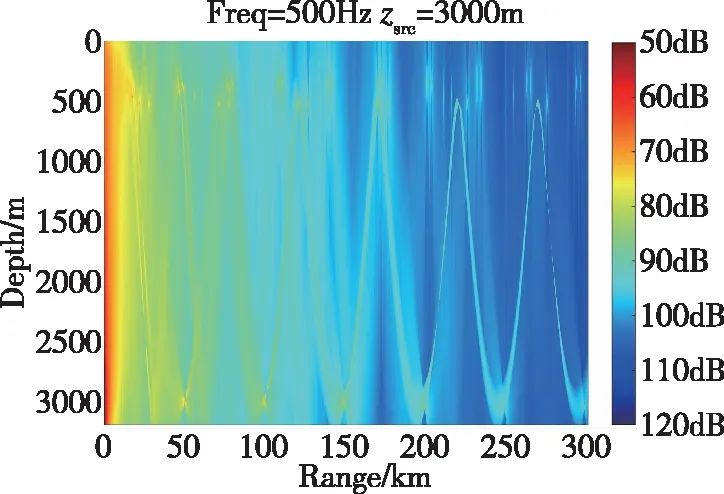
图2 500Hz声学导航水下传播损失
Fig. 2 Loss of underwater transmission for acoustic navigation with 500Hz
当前,中高频声学导航技术的典型应用为哈尔滨工程大学的深海高精度水声定位系统,以中高频工作频段的声学导航定位为基础,为全海深载人潜水器奋斗者号和4500m载人潜水器深海勇士号提供全流程下潜定位导航服务,为开展世界最深点探索、挑战者深渊地形地貌测量、近底观测取样、深海生物拍摄和抓取提供了高精度、连续、稳定可靠的定位信息[9,17,30-31]。2015年,马努斯热液-南海冷泉航次的深海高精度水声定位系统完成海上试验与应用,实现了静态定位精度优于0.2m,动态定位精度优于0.5m,为发现号ROV的全航次作业提供了亚米级定位支撑。2017年,深海高精度水声定位系统成功支撑了深海勇士号载人深潜首航试验,实现了动态定位精度优于0.3m,为载人潜水器10min完成目标寻找试验起到关键性作用,系统有效率超过90%。
综上,中高频声学导航设备基本可以满足不同精度要求的全海深水下用户需求,但其作用距离有限,通常仅有几km到几十km左右;由于其工作在较高工作频段,传播损失较大,从而具有一定的隐蔽性。因此,中高频声学导航定位应用将不适用大面积建设,仅适用局部海域布设,依据不同水下用户的导航定位精度需求,采用不同的工作频率声学设备,适当增大或减小布设密度,满足潜艇、水下无人作战平台及其他海洋活动高精度导航需求。
当水声导航定位设备工作在较低工作频段时,可以进行远距离传输,有望实现水下PNT声学导航的广域性建设,进而满足水下用户的广域性需求。由于海洋环境的非均匀声学介质特性影响,使得声信号在水声信道中沿着不同路径到达接收点。在声学导航接收信号端则主要体现在直达声和经海面海底反射的反射声随到达时间逐渐衰减的多重信号。而水声导航定位过程通常期望采用直达声信号进行导航定位,故远程声学导航定位将对海洋环境有其特殊要求,特别是水深地形等。
在广域的海洋环境中,可以满足低频水声实现远距离传输的水声信道主要有:浅表层远程声信道、声道轴远程声信道以及可靠声路径远程声信道三种。浅表层远程声信道通常为200m以内海深的表面波导层;声道轴远程声信道通常分布在1000m左右海深;可靠声路径远程声信道则主要依靠深海声线弯曲以及声线反转实现远距离传输。其中,浅表层远程声信道在近海面中,将会受到海面混响、近海面噪声干扰以及严重的时空变异性,很难实现远程声学导航定位能力。例如,夏季的表面远程声信道层很薄并且不稳定,存在强烈的时空变异性,是不稳定的信道。因此,本文主要针对声道轴远程声信道以及可靠声路径远程声信道两种远程声信道进行分析,明确其在不同水下用户需求所对应的服务场景的优越性与局限性。
以300km水声作用距离为例,图3所示为3000m声源激励的可靠声路径远程声信道的直达声线轨迹。300km作用距离可靠声路径远程声信道的直达声分布区域如表2所示。由图3可知,可靠声信道的直达声线轨迹将出现明显的直达声分布区和直达声影区,在作用距离0~300km范围内大约存在5~6个直达声分布区和直达声影区。同时,可靠声路径远程声信道全部直达声要求水深至少在3800m以上。由表2可知,在300km的水平距离上,存在有6个直达声分布区,最大直达声分布区的宽度为43km。
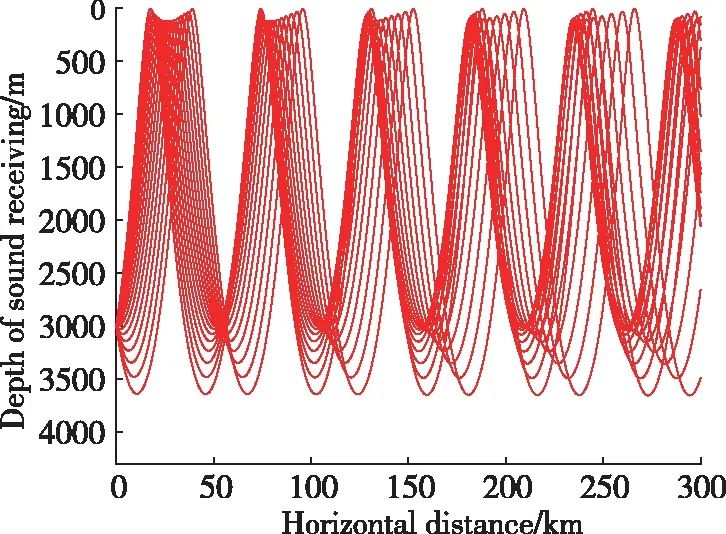
图3 可靠声路径远程声信道的直达声线轨迹图
Fig.3 Trajectory of sound ray of direct sound with remote acoustic channel based on reliable acoustic path
假设声源无开角限制,以球面360°实现声信号发射,由于存在直达声影区,则在不同海水深度的平面内,直达声分布将呈环形带状分布。以三角形阵型布设低频远程声学导航声源,采用三圆交汇原理进行定位,则可靠声路径远程声信道可满足实现水下定位分布的区域如图4所示,可满足实现水下定位分布的区域为图中黑色覆盖区域,则采用可靠声路径远程声学实现水下导航定位在其布设范围内仍存在较多的导航盲区,有效定位区域分布有限。因此,采用可靠声路径远程声学实现水下PNT体系导航定位的方法存在一定局限性。
表2 300km作用距离可靠声路径的直达声分布区域
Tab.2 Distribution of direct sound with reliable acoustic path in 300km distance
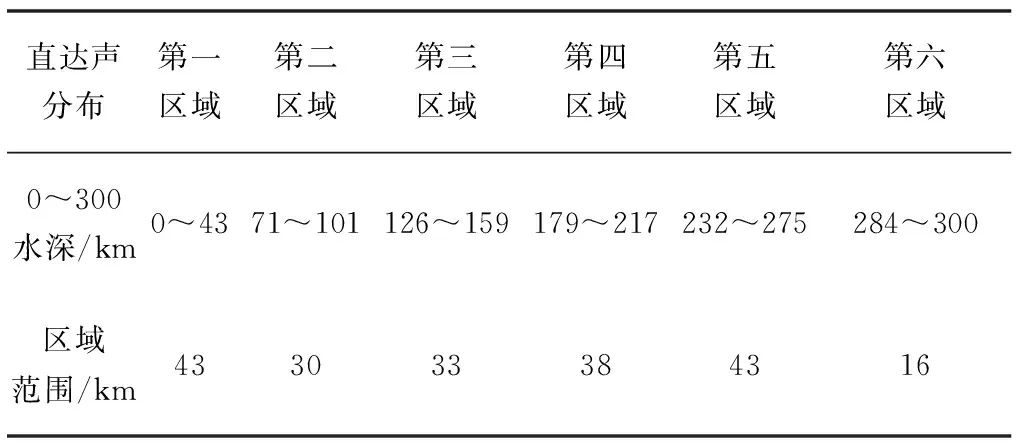
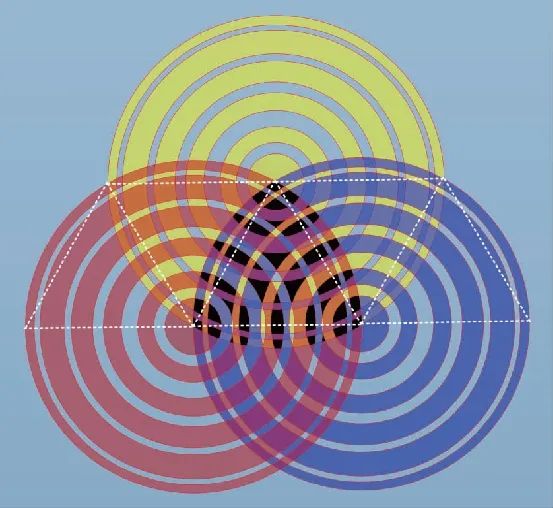
图4 可靠声路径远程声信道水下三圆交汇定位分布区域
Fig.4 Positioning distribution area of remote acoustic channel based on reliable acoustic path with three-circle intersection
图5所示为300km作用距离声道轴远程声信道的直达声线轨迹。声道轴远程声轨迹的直达声区域宽度随着水平距离的增加将逐渐变宽,当前直达声区域尾部与后直达声区域首部重叠时,0~500m深度范围内直达声影区逐渐消失,但声道轴远程声信道的直达声在0~500m深度范围内直达声区域声能量相对分散,使得传播损失变大,很难完成有效声信号的捕获以及跟踪。值得注意的是,在声道轴附近,大部分声能被限制在声道轴上下一定厚度的水层中传播,且声波能量在声道轴深度附近最为集中,容易完成声信号的接收,具备实现远程声学导航的条件。然而,声道轴远程声信道全部直达声要求海深范围至少达到3600m以上。因此,基于声道轴的低频远程声学导航有望实现远距离的传输,具有较高费效比,满足水下PNT声学导航基础设施的广域性建设需求。但基于声道轴的低频远程声学导航仅可以为声道轴(1000m左右海深)附近用户提供导航定位的能力,并对水下水深地形有一定要求。
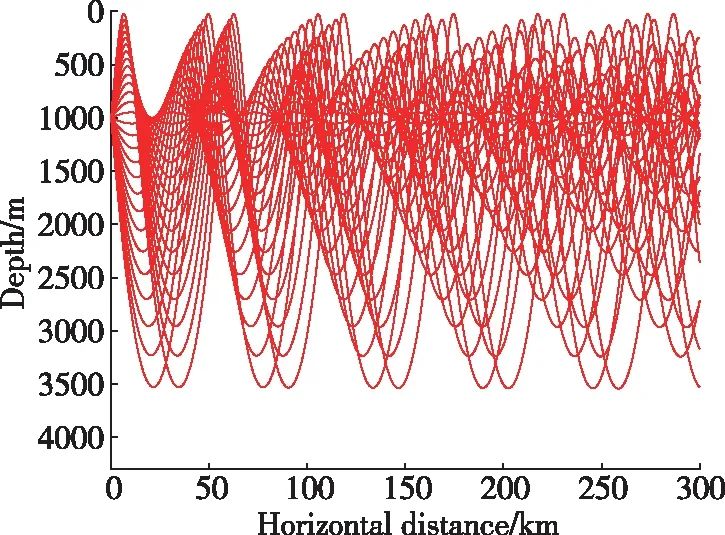
图5 声道轴远程声信道的直达声声线轨迹图
Fig.5 Trajectory of sound ray of direct sound with remote acoustic channel based on the acoustic channel axis
如图6所示,选取我国南海南沙群岛附近海域和中部平坦海域两条测试路径进行仿真,基于声道轴的低频远程声学传播测试路径的水深地形剖面、声线传播路径和声传播损失如图7~图12所示。在深海地形平坦的海域,声信号在声道轴传播可满足远程导航定位需求,如图10和图12所示。但在海底地形崎岖的海域,由于水深地形的遮挡,声信号无法有效地传播满足远程导航定位需求,如图9和图11所示。因此,低频远程声学导航需要在满足一定海深条件并且地形相对平坦的区域实施。
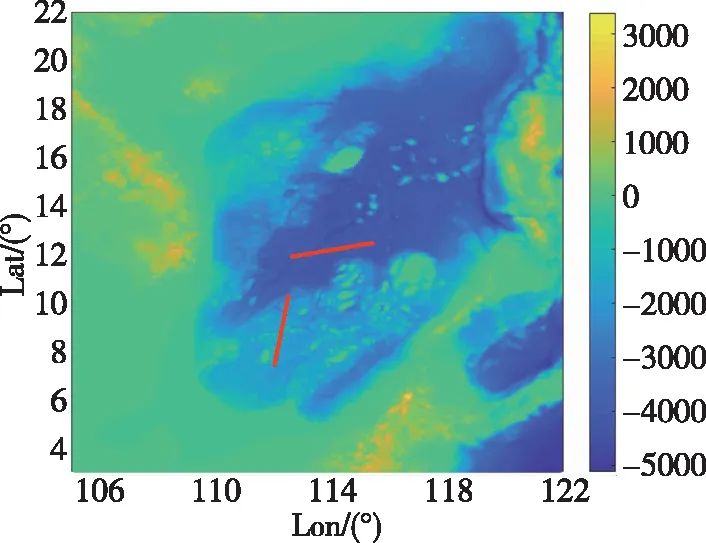
图6 南海海域2条水下测试路径
Fig.6 Two underwater test paths in the South China Sea
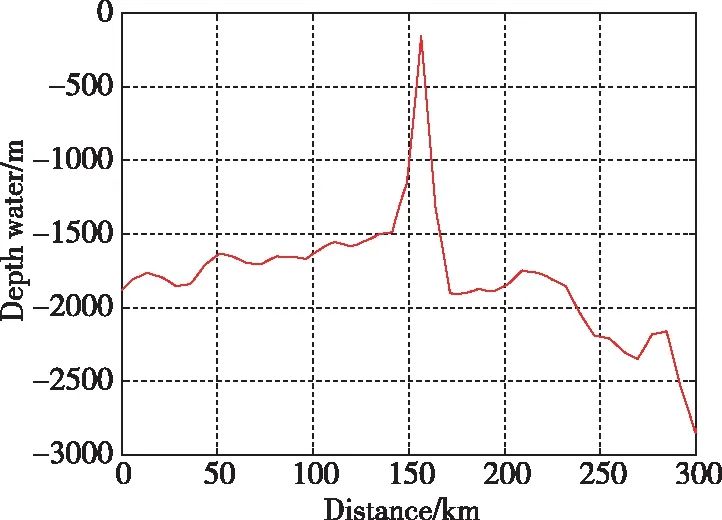
图7 测试路径1的水下水深地形剖面
Fig.7 Profile of the underwater depth and topography for test path 1
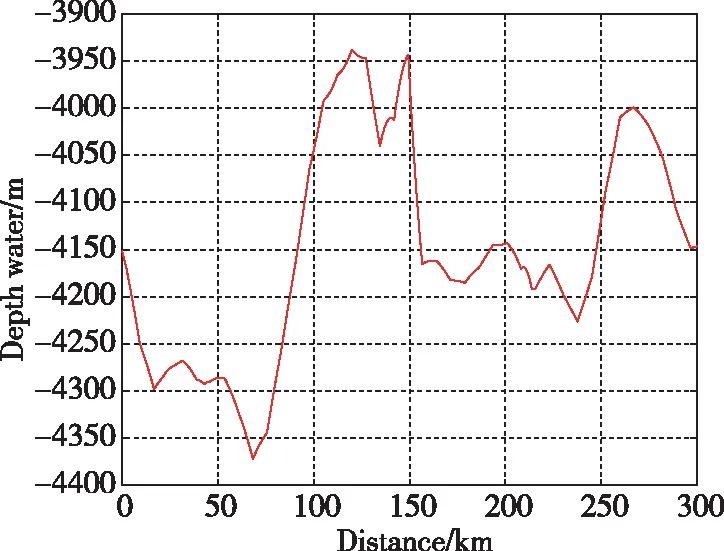
图8 测试路径2水下水深地形剖面
Fig.8 Profile of the underwater depth and topography for test path 2
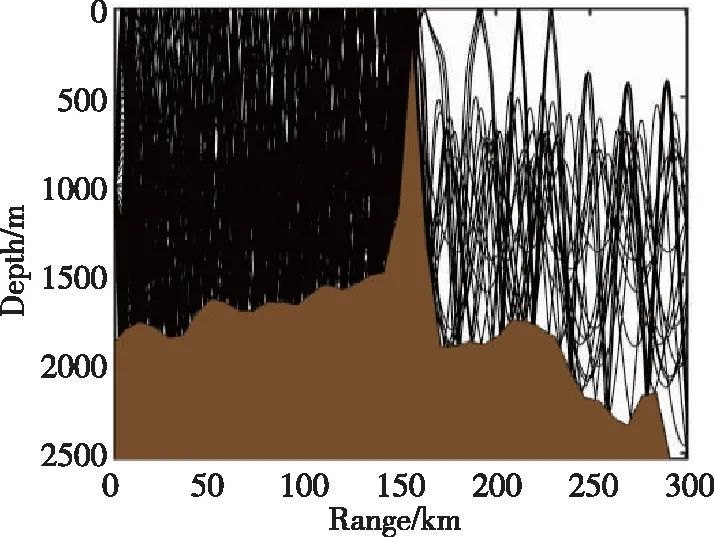
图9 测试路径1的水下声线传播
Fig.9 Acoustic propagation of test path 1
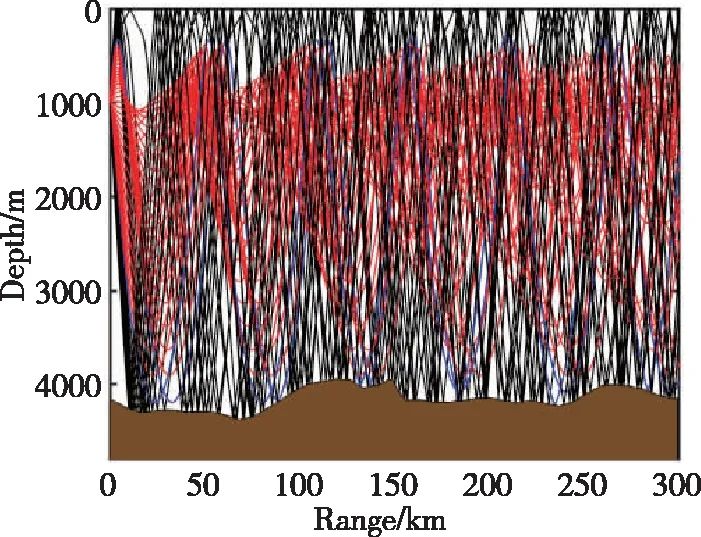
图10 测试路径2的水下声线传播
Fig.10 Acoustic propagation of test path 2
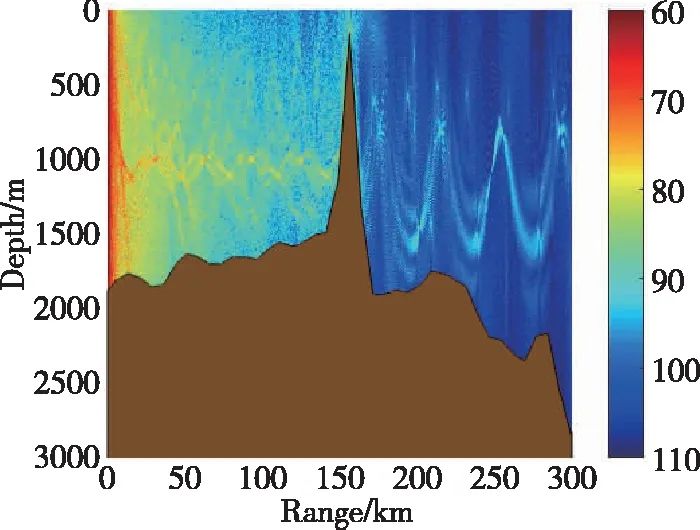
图11 测试路径1的水下声传播损失
Fig.11 Loss of underwater acoustic transmission of test path 1
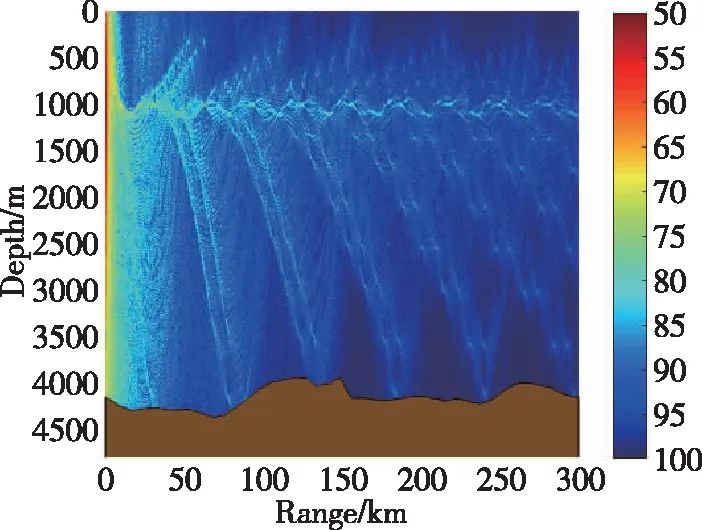
图12 测试路径2的水下声传播损失
Fig.12 Loss of underwater acoustic transmission of test path 2
综上所述,低频远程声学导航设备在声道轴远程声信道以及可靠声路径远程声信道可以实现声信号的远程传播,满足水下用户广域性应用需求。基于可靠声路径的远程声学导航定位方法在布设范围内仍存在导航盲区,具有一定的局限性。基于声道轴的远程声学导航对声道轴附近用户广域性的导航定位需求具有特殊优越性。因此,基于声道轴的远程声学导航技术研究有望成为未来水下低频远程声学导航技术发展的主要研究方向,具有较高费效比,满足水下无人平台的广域性导航定位需求,其对于声道轴附近水下用户更具优越性,可以直接进行导航定位。同时,低频声学导航对水下水深及地形有一定的要求,实现远距离导航需满足全部直达声信道约3600m以上的水深条件以及相对平坦的地形要求。
由上分析,高频声学导航定位具有较好的隐蔽性和精确性,但作用距离有限,仅适用于局部海域的布设;低频声学导航定位具有较远的作用距离,可以更好地凸显水下唯一远距离稳定传播的信息载体的优越性,但其对水下水深及地形具有一定的要求,需满足约3600m水深条件以及相对平坦的区域地形要求。因此,针对水下PNT声学导航技术的水下应用分析应先从水下水深及地形出发分析其可用性。
图13所示为我国近海和“两洋”区域的水下水深地形图。图14所示为南海海域水下水深地形三维图。图15所示为二岛链海域水下水深地形三维图。图16所示为西太海域水下水深地形三维图。
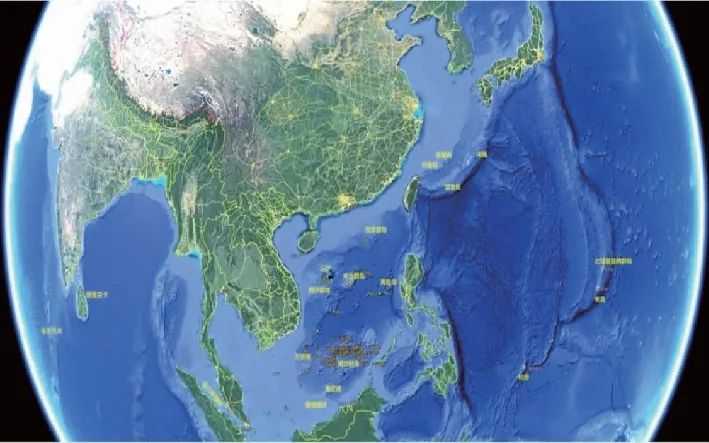
图13 近海、“两洋”区域水下水深地形图
Fig.13 Underwater depth and topography of China’s offshore and two ocean areas
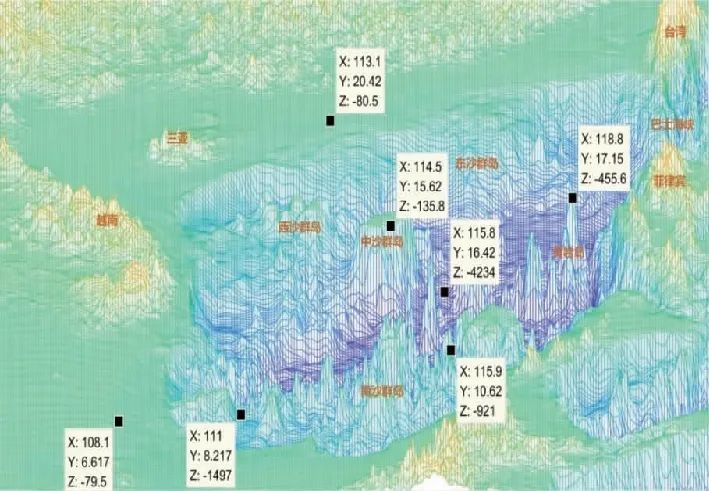
图14 南海海域水下水深地形三维图
Fig.14 Three-dimensional map of underwater depth and topography for the South China Sea
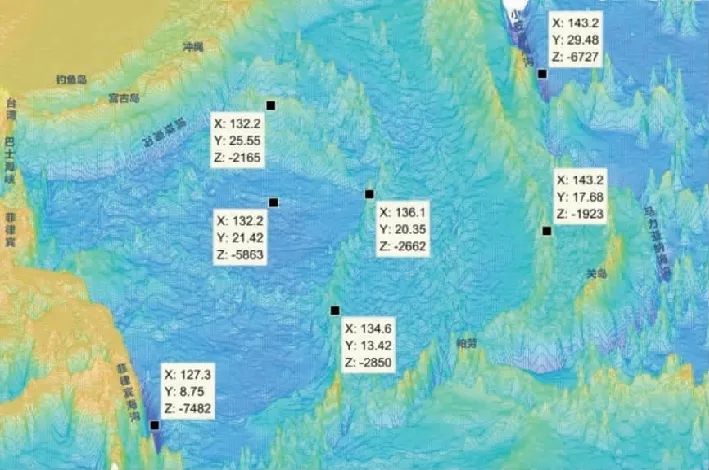
图15 二岛链海域水下水深地形三维图
Fig.15 Three-dimensional map of underwater depth and topography for the two island Chain area
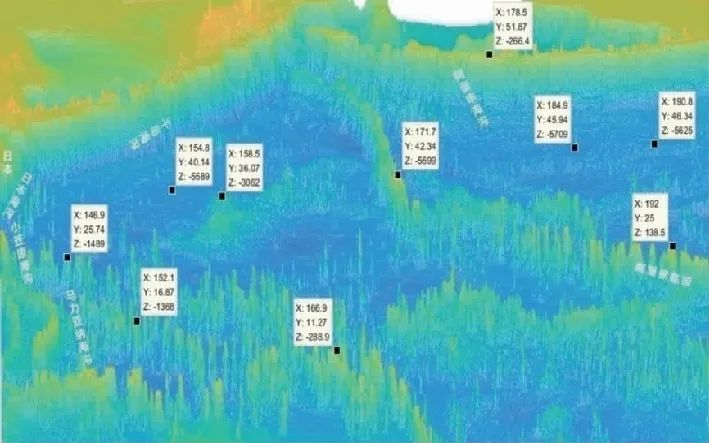
图16 西太海域水下水深地形三维图
Fig.16 Three-dimensional map of underwater depth and topography for the Western Pacific Region
由图13~图16可知,我国南海包含有东沙群岛、西沙群岛、中沙群岛、南沙群岛等区域,具有较复杂的水深地形情况,仅南海中部区域有较深水深且平缓的地形。其中,大陆架周围水深约为100m,中部最深海水深度约为4234m。二岛链海域范围具有较深的海水深度,约为5863m,中部存在连续海山,海水深度约为2662m。西太海域上部具有较平坦的海底地形以及较深的海水深度,约5730m;西太海域下部则是众多海山地形,海山深度约1318m。“两洋”海域则具有更深水深且海底地形平缓。
以300km水声作用距离的低频远程声学导航设施覆盖太平洋全海域为例,其布设情况如图17所示,需要上千个水声基阵,工程难度巨大、工程费效比较低,采用低频远程声学导航实现全海域覆盖几乎不可实施。
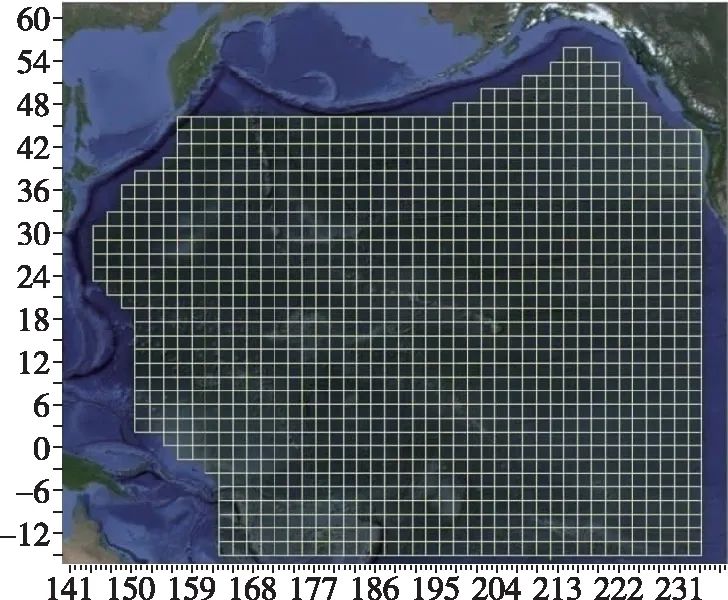
图17 低频远程声学导航太平洋全海域覆盖布设示意图
Fig.17 Deployment of full coverage construction of the whole Pacific region with low frequency acoustic navigation technology
由上,针对水下PNT声学导航技术的水下应用,主要包括中高频近程声学导航和低频远程声学导航技术两方面:
针对中高频近程声学导航技术的水下应用,一是依据军用水下平台对水下导航定位的隐蔽性需求,可在近海局部重点海域布设,作为辅助校准手段,满足水下军用用户的隐蔽长航时高精度导航定位需求;二是依据不同水下民用用户的导航定位精度需求,采用不同工作频率声学设备,适当增大或减小布设密度,满足水下民用用户的高精度导航需求。
针对低频远程声学导航技术的水下应用,可优先考虑声道轴的远程声学导航技术发展,依托低频远程声学导航定位对水下水深及地形要求,实现我国近海岸海域范围内南海海域及二岛链海域应用;“两洋”海域的低频远程声学导航应用则可以采用高速公路服务区的应用模式,结合水下平台适配的惯性导航、匹配导航等自主导航系统,满足潜艇、水下无人作战平台及其他海洋活动的广域性导航定位需求。
由于水下导航定位手段相对匮乏,声学导航定位方法是水下PNT建设的一种有效增量手段。面向当前对水下导航定位服务能力的迫切需求,则应充分发挥和利用声学导航技术增量手段,即充分发挥利用中高频声学导航技术的隐蔽性和精确性,以及低频声学导航技术的广域性,满足水下用户对水下导航定位能力的隐蔽性、广域性以及精确性需求。
1)结合军用水下有人平台导航需求,加快中高频声学导航的水下应用技术研究,满足水下有人平台长航时隐蔽高精度导航定位需求。
2)结合未来水下无人平台的自主导航能力,加紧低频远程声学导航定位关键技术突破,大幅提升声学导航的作用距离,形成服务区模式的未来建设规划发展思路,满足水下无人平台的广域性导航定位能力需求。
3)结合水下民用用户的导航精度要求,开展基于中高频声学导航的多源信息综合应用技术的标准化、型谱化规划研究,形成水下综合导航定位服务能力,实现民用水下导航的提质、降本、增效,打造民用市场核心竞争力。
参考文献(略)

(扫码查看全文)
编辑:Livia
审核:Jinn
