
卓老师好,不知道您还记不记得
15届车赛的组别赛题初稿中的如影随形组,后来由于疫情以及其他的一些原因这个组别不得已被取消了,我也因此从这个组别转入了双车组。在大四临毕业时使用UWB和麦克纳姆轮车模制作了如影随形的跟随小车。录制了一些视频卓老师看看效果,说不定可以为18届智能车竞赛提供参考。
下面是演示视频在 B 站上的连接:
视频链接: 【如影随形 - 永远跟随并陪伴你的智能小车-哔哩哔哩】 https://b23.tv/VvBETmL
视频P1为纯UWB跟随模式;

P2为UWB跟随+激光雷达避障模式;
P3为手机App遥控模式;
上述演示视频中车模使用到的相关技术:
LiDAR感知、UWB定位、嵌入式操作系统、以及无线通信等技术,设计并研制出一种能够实现全向移动、实时轨迹纠正和智能自主跟随的系统,该系统搭建UWB三基站单标签定位跟随模型,使用RT-Thread嵌入式实时操作系统编写测距、定位、跟随等算法,实时构建目标方位解算的数学模型,最终控制麦克纳姆轮车模实现实时感知目标跟随人员方位的目的。Qt Creator设计制作了相应的手机App,用户可以使用该App对麦克纳姆轮车模进行全方位摇杆控制;系统还具有显示小车当前移动速度和电池电量等功能。1:将UWB技术运用到双车跟随/越野跟随中,前车搭载摄像头、电磁、(如果是越野组别则可使用GPS)等传感器进行寻迹,并在前车上安装一个UWB定位标签节点;后车不允许使用寻迹传感器,仅搭载2-3个UWB定位基站节点对前车进行定位跟随。该赛题可考验两辆车模的协同运行能力及UWB定位技术。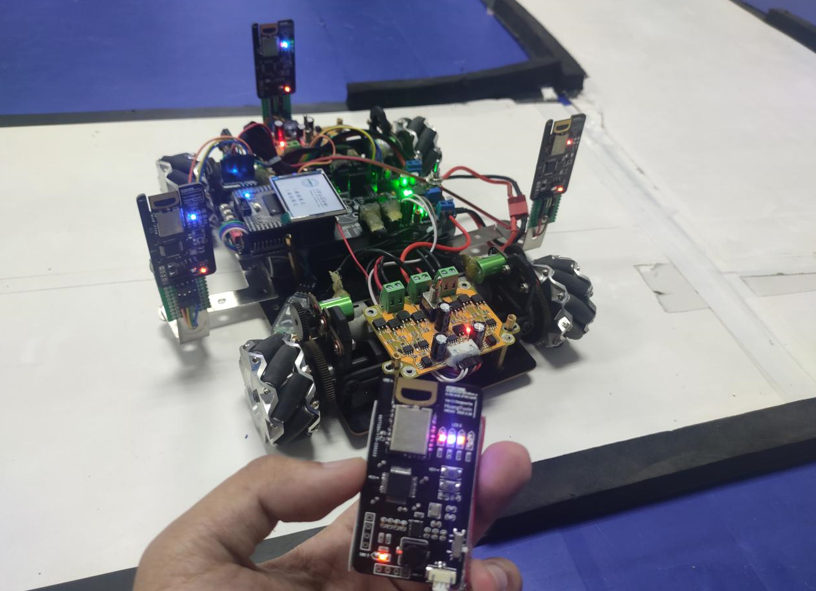
2:将UWB技术运用到视觉任务中,在场地四周搭建UWB基站,小车上搭载定位标签,可以像今年的协同搬运挑战赛一样由场外摄像头进行辅助识别点位,然后下发坐标给场内的小车,小车使用UWB进行定位,最终完成指定任务。(如四轮组)车模上安装UWB标签,在赛道周围安装UWB基站,先让车模沿赛道行驶一周记录UWB实时坐标,再取下寻迹传感器,让其依据坐标点位在赛道中第二次行驶。考察定位的准确性。用时按两圈总用时计算。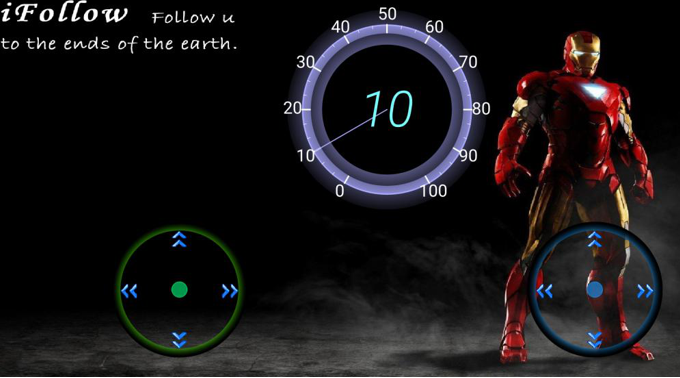
3:沿用15届车赛的组别赛题初稿中的“如影随形”/“猎犬出击”组规则,可以采用两种形式完成比赛,一种方式是在车模上安装GPS模块/UWB标签,比赛期间,先由队员自行完成比赛路径一周奔跑,并自动记录轨迹的GPS数据/UWB实时坐标,在终点时,将轨迹数据传入车模,使得车模完成一周的运行。/UWB定位基站,队员引导车模完成行人跟随。在比赛中,要求队员能够很好地与车模进行配合,快速稳定的完成比赛。
最后,祝卓老师身体健康,智能车竞赛越办越好!
山魂八队无线充电
视频1:车模供电讲解
