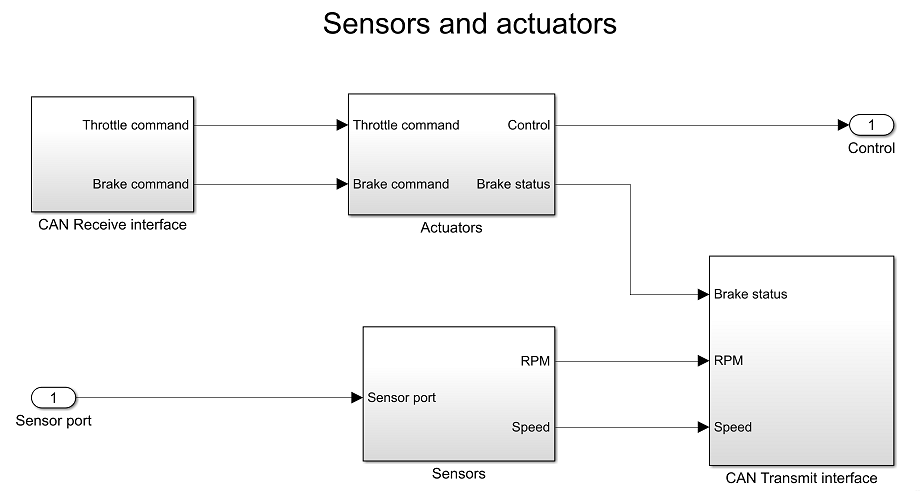
该子系统包含节气门体和制动作动器以及 RPM 和车速传感器。作动器通过 CAN 总线接收节气门和刹车命令。作动器输出(控制)馈送到车辆动力学模型。制动作动器还发送一个信号,通知是否执行了刹车。该信号以 100 Hz 采样并传输到 CAN 总线。来自车辆动力学模型的引擎 RPM 和车速信号输入到该子系统,并且还以 100Hz 采样并传输到 CAN 总线。
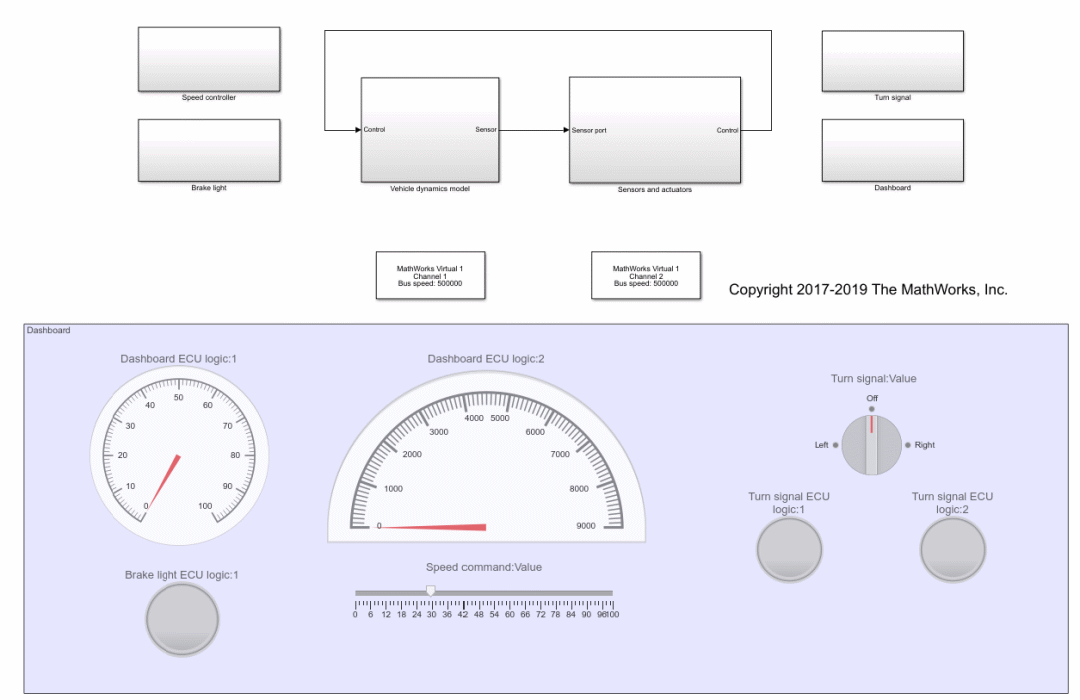
控制板
控制板是车辆和驾驶员之间的接口。用户可以使用滑块设置所需的速度 (Speed command:Value)。可以使用旋转开关操作转向信号 (Turn signal:Value)。速度命令和转向信号状态信号传输到 CAN 总线。从 CAN 总线读取采样的车速和引擎 RPM,并将其分别显示在车速表和转速表上。
速度控制器
速度控制器向作动器发送命令以将车速驱动到要求的值。从 CAN 总线读取车速和所需的速度。节气门和刹车命令由对应的离散比例积分控制器计算。作动器命令传输到 CAN 总线。
刹车灯
刹车灯子系统从 CAN 总线接收制动作动器状态信号并相应地操作刹车灯。只要刹车启动,刹车灯就会亮起。
转向信号
转向信号子系统从 CAN 总线接收转向信号状态报文并相应地激活转向信号。当旋转开关设置为“左侧位置”时,左转向信号灯周期性闪烁,当旋转开关设置为“右侧位置”时,右转向信号灯周期性闪烁。
后摄像头是长这个样子,如下图。5孔(D-,D+,5V,12V,GND),说的是连接线的个数,如下图。4LED,+12V驱动4颗LED灯珠,给摄像头补光用的,如下图。打开后盖,发现里面有透明白胶(防水)和白色硬胶(固定),用合适的工具,清理其中的胶状物。BOT层,AN3860,Panasonic Semiconductor (松下电器)制造的,Cylinder Motor Driver IC for Video Camera,如下图。TOP层,感光芯片和广角聚焦镜头组合,如下图。感光芯片,看着是玻