▲ 更多精彩内容 请点击上方蓝字关注我们吧!
现在大多数电子系统都要支持热插拔功能,所谓热插拔,也就是在系统正常工作时,带电对系统的某个单元进行插拔操作,且不对系统产生任何影响。
热插拔对系统的影响主要有两方面:
其一,热插拔时,连接器的机械触点在接触瞬间会出现弹跳,引起电源振荡,如下图所示:
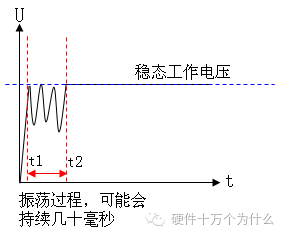
这个振荡过程会引起系统电源跌落,引起误码,或系统重启,也可能会引起连接器打火,引发火灾。
解决的办法就是延迟连接器的通电时间,在连接器抖动的那十几毫秒内((t1至t2)不给连接器通电,等插入稳定后(t2后)再通电,即防抖动延时。
其二,热插拔时,由于系统大容量储能电容的充电效应,系统中会出现很大的冲击电流,大家都知道,电容在充电时,电流呈指数趋势下降(左下图),所以在刚开始充电的时候,其冲击电流是非常大的。
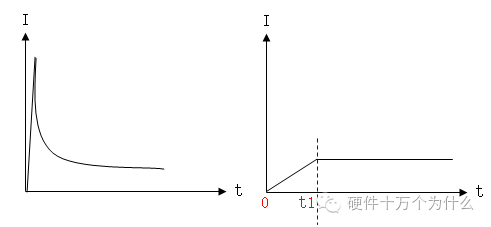
此冲击电流可能会烧毁设备电源保险管,所以在热插拔时必须对冲击电流进行控制,使其按理想的趋势变化,如右上图所示,图中0~t1为电源缓启动时间。
综上所述,缓启动电路主要的作用是实现两项功能:
1).防抖动延时上电;
2).控制输入电流的上升斜率和幅值。
缓启动电路有两种类型:电压斜率型和电流斜率型。
电压斜率型缓启动电路结构简单,但是其输出电流的变化受负载阻抗的影响较大,而电流斜率型缓启动电路的输出电流变化不受负载影响,但是电路结构复杂。
下面重点介绍电压型缓启动电路。
设计中通常使用MOS管来设计缓启动电路的。MOS管有导通阻抗Rds低和驱动简单的特点,在周围加上少量元器件就可以构成缓慢启动电路。通常情况下,在正电源中用PMOS,在负电源中使用NMOS。
下图是用NMOS搭建的一个-48V电源缓启动电路,我们来分析下缓启动电路的工作原理。
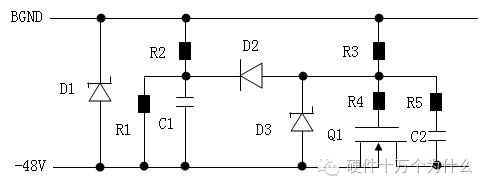
1).D1是嵌位二极管,防止输入电压过大损坏后级电路;
2).R2和C1的作用是实现防抖动延时功能,实际应用中R2一般选20K欧姆,C1选4.7uF左右;
3).R1的作用是给C1提供一个快速放电通道,要求R1的分压值大于D3的稳压值,实际应用中,R1一般选10K左右;
4).R3和C2用来控制上电电流的上升斜率,实际应用中,R3一般选200K欧姆左右,C2取值为10 nF~100nF;
5).R4和R5的作用是防止MOS管自激振荡,要求R4、R5lt;<R3,R4取值一般为10~50欧姆之间,R5一般为2K欧姆;
6).嵌位二极管D3的作用是保护MOS管Q1的栅-源极不被高压击穿;D2的作用是在MOS管导通后对R2、C1构成的防抖动延时电路和R3、C2构成的上电斜率控制电路进行隔离,防止MOS栅极充电过程受C1的影响。
下面来分析下该电路的缓启动原理:
假设MOS管Q1的栅-源极间的寄生电容为Cgs,栅-漏极间的寄生电容为Cgd,漏-源极间的寄生电容为Cds,栅-漏极外部并联了电容C2 (C2gt;>Cgd),所以栅-漏极的总电容C’gd=C2+ Cgd,由于相对于C2 来说,Cgd的容值几乎可忽略不计,所以C’gd≈C2,MOS管栅极的开启电压为Vth,正常工作时,MOS管栅源电压为Vw(此电压等于稳压管D3的嵌位电压),电容C1充电的时间常数t=(R1//R2//R3)C1,由于R3通常比R1、R2大很多,所以t≈(R1//R2)C1。
下面分三个阶段来分析上述电压缓启动电路的工作原理:
第一阶段:-48V电源对C1充电,充电公式如下。
Uc=48*R1/(R1+R2)[1-exp(-T/t)],其中T是电容C1电压上升到Uc的时间,时间常数t=(R1//R2)C1。所以,从上电到MOS管开启所需要的时间为:Tth=-t*ln[1-(Uc*(R1+R2)/(48*R1))]
第二阶段:MOS管开启后,漏极电流开始增大,其变化速度跟MOS管的跨导和栅源电压变化率成正比,具体关系为:dIdrain/dt = gfm *dVgs/dt,其中gfm为MOS管的跨导,是一个固定值,Idrain为漏极电流,Vgs为MOS管的栅源电压,此期间体现为栅源电压对漏源电流的恒定控制,MOS管被归纳为压控型器件也是由此而来的。
第三阶段:当漏源电流Idrain达到最大负载电流时,漏源电压也达到饱和,同时,栅源电压进入平台期,设电压幅度为Vplt。由于这段时间内漏源电流Ids保持恒定,栅源电压Vplt=Vth+(Ids/gfm),同时,由于固定的栅源电压使栅极电流全部通过反馈电容C’gd,则栅极电流为Ig=(Vw-Vplt)/(R3+R5),由于R5相对于R3可以忽略不计,所以Ig≈(Vw-Vplt)/R3。因为栅极电流Ig≈Icgd,所以,Icgd=Cgd*dVgd/dt。由于栅源电压在这段时间内保持恒定,所以栅源电压和漏源电压的变化率相等。故有:dVds/dt=dVgd/dt=(Vw-Vplt)/(R3*C2)。
由此公式可以得知,漏源电压变化斜率与R3*C2的值有关,对于负载恒定的系统,只要控制住R3*C2的值,就能控制住热插拔冲击电流的上升斜率。
缓启动阶段,栅源电压Vgs,漏源电压Vds和漏源电流Ids的变化示意图如下所示。
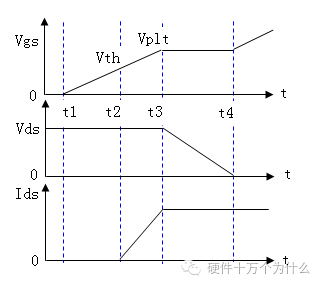
在0~t1阶段,肖特基二极管D2尚未开启,所以Vgs等于0,在这段时间内,-48V电源通过R3、R5对C2充电,等C2的电压升高到D2的开启电压,MOS管的栅极电压开始升高,等栅源电压升高到MOS管的开启电压Vth时,MOS管导通,漏源电流Ids开始增大,等MOS管的栅源电压升高到平台电压Vplt时,漏源电流Ids也达到最大,此时,漏源电压Vds进入饱和,开始下降,平台电压Vplt结束时,MOS管完全导通,漏源电压降到最低,MOS管的导通电阻Rds最小。
在电信工业和微波电路设计领域,普遍使用MOS管控制冲击电流的方达到电流缓启动的目的。MOS管有导通阻抗Rds_on低和驱动简单的特点,在周围加上少量元器件就可以构成缓慢启动电路。虽然电路比较简单,但只有吃透MOS管的相关开关特性后才能对这个电路有深入的理解。
本文首先从MOSFET的开通过程进行叙述:
尽管MOSFET在开关电源、电机控制等一些电子系统中得到广泛的应用,但是许多电子工程师并没有十分清楚的理解MOSFET开关过程,以及MOSFET在开关过程中所处的状态一般来说,电子工程师通常基于栅极电荷理解MOSFET的开通的过程,如图1所示此图在MOSFET数据表中可以查到
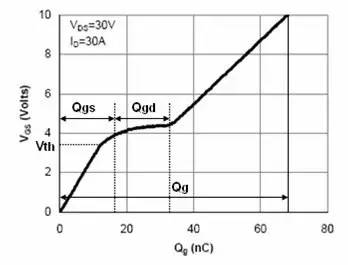
图1 AOT460栅极电荷特性
MOSFET的D和S极加电压为VDD,当驱动开通脉冲加到MOSFET的G和S极时,输入电容Ciss充电,G和S极电压Vgs线性上升并到达门槛电压VGS(th),Vgs上升到VGS(th)之前漏极电流Id≈0A,没有漏极电流流过,Vds的电压保持VDD不变。
当Vgs到达VGS(th)时,漏极开始流过电流Id,然后Vgs继续上升,Id也逐渐上升,Vds仍然保持VDD当Vgs到达米勒平台电压VGS(pl)时,Id也上升到负载电流最大值ID,Vds的电压开始从VDD下降。
米勒平台期间,Id电流维持ID,Vds电压不断降低。
米勒平台结束时刻,Id电流仍然维持ID,Vds电压降低到一个较低的值米勒平台结束后,Id电流仍然维持ID,Vds电压继续降低,但此时降低的斜率很小,因此降低的幅度也很小,最后稳定在Vds=Id×Rds(on)因此通常可以认为米勒平台结束后MOSFET基本上已经导通。
对于上述的过程,理解难点在于为什么在米勒平台区,Vgs的电压恒定?驱动电路仍然对栅极提供驱动电流,仍然对栅极电容充电,为什么栅极的电压不上升?而且栅极电荷特性对于形象的理解MOSFET的开通过程并不直观因此,下面将基于漏极导通特性理解MOSFET开通过程。
MOSFET的漏极导通特性与开关过程。
MOSFET的漏极导通特性如图2所示MOSFET与三极管一样,当MOSFET应用于放大电路时,通常要使用此曲线研究其放大特性只是三极管使用的基极电流、集电极电流和放大倍数,而MOSFET使用栅极电压、漏极电流和跨导。
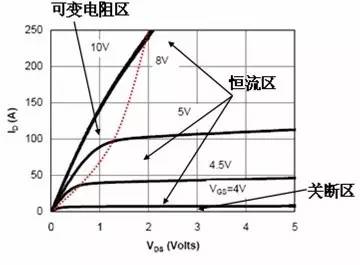
图2 AOT460的漏极导通特性
三极管有三个工作区:截止区、放大区和饱和区,MOSFET对应是关断区、恒流区和可变电阻区注意:MOSFET恒流区有时也称饱和区或放大区当驱动开通脉冲加到MOSFET的G和S极时,Vgs的电压逐渐升高时,MOSFET的开通轨迹A-B-C-D如图3中的路线所示
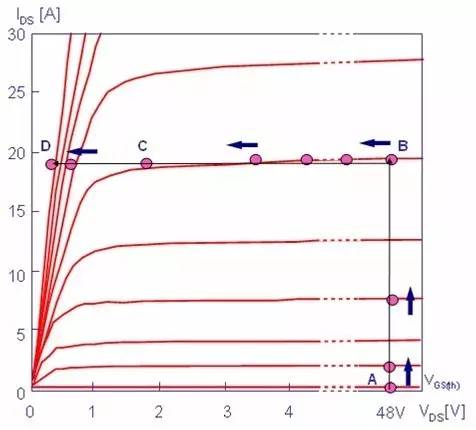
图3 AOT460的开通轨迹
开通前,MOSFET起始工作点位于图3的右下角A点,AOT460的VDD电压为48V,Vgs的电压逐渐升高,Id电流为0,Vgs的电压达到VGS(th),Id电流从0开始逐渐增大
A-B就是Vgs的电压从VGS(th)增加到VGS(pl)的过程从A到B点的过程中,可以非常直观的发现,此过程工作于MOSFET的恒流区,也就是Vgs电压和Id电流自动找平衡的过程,即Vgs电压的变化伴随着Id电流相应的变化,其变化关系就是MOSFET的跨导:Gfs=Id/Vgs,跨导可以在MOSFET数据表中查到
当Id电流达到负载的最大允许电流ID时,此时对应的栅级电压Vgs(pl)=Id/gFS由于此时Id电流恒定,因此栅极Vgs电压也恒定不变,见图3中的B-C,此时MOSFET处于相对稳定的恒流区,工作于放大器的状态
开通前,Vgd的电压为Vgs-Vds,为负压,进入米勒平台,Vgd的负电压绝对值不断下降,过0后转为正电压驱动电路的电流绝大部分流过CGD,以扫除米勒电容的电荷,因此栅极的电压基本维持不变Vds电压降低到很低的值后,米勒电容的电荷基本上被扫除,即图3中的C点,于是,栅极的电压在驱动电流的充电下又开始升高,如图3中的C-D,使MOSFET进一步完全导通
C-D为可变电阻区,相应的Vgs电压对应着一定的Vds电压Vgs电压达到最大值,Vds电压达到最小值,由于Id电流为ID恒定,因此Vds的电压即为ID和MOSFET的导通电阻的乘积
基于MOSFET的漏极导通特性曲线可以直观的理解MOSFET开通时,跨越关断区、恒流区和可变电阻区的过程米勒平台即为恒流区,MOSFET工作于放大状态,Id电流为Vgs电压和跨导乘积
电路原理详细说明:
MOS管是电压控制器件,其极间电容等效电路如图4所示。
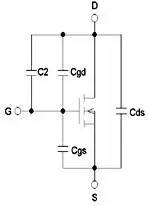
图4. 带外接电容C2的N型MOS管极间电容等效电路
MOS管的极间电容栅漏电容Cgd、栅源电容Cgs、漏源电容Cds可以由以下公式确定:
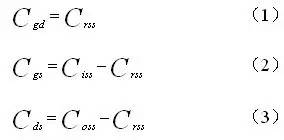
公式中MOS管的反馈电容Crss,输入电容Ciss和输出电容Coss的数值在MOS管的手册上可以查到。
电容充放电快慢决定MOS管开通和关断的快慢,Vgs首先给Cgs 充电,随着Vgs的上升,使得MOS管从截止区进入可变电阻区。进入可变电阻区后,Ids电流增大,但是Vds电压不变。随着Vgs的持续增大,MOS管进入米勒平台区,在米勒平台区,Vgs维持不变,电荷都给Cgd 充电,Ids不变,Vds持续降低。在米勒平台后期,MOS管Vds非常小,MOS进入了饱和导通期。为确保MOS管状态间转换是线性的和可预知的,外接电容C2并联在Cgd上,如果外接电容C2比MOS管内部栅漏电容Cgd大很多,就会减小MOS管内部非线性栅漏电容Cgd在状态间转换时的作用,另外可以达到增大米勒平台时间,减缓电压下降的速度的目的。外接电容C2被用来作为积分器对MOS管的开关特性进行精确控制。控制了漏极电压线性度就能精确控制冲击电流。
电路描述:
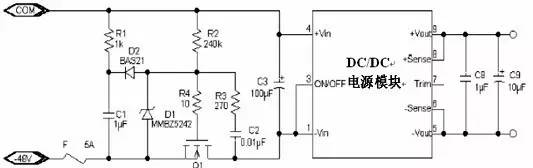
图5所示为基于MOS管的自启动有源冲击电流限制法电路。MOS管 Q1放在DC/DC电源模块的负电压输入端,在上电瞬间,DC/DC电源模块的第1脚电平和第4脚一样,然后控制电路按一定的速率将它降到负电压,电压下降的速度由时间常数C2*R2决定,这个斜率决定了最大冲击电流。
C2可以按以下公式选定:

R2由允许冲击电流决定:

其中Vmax为最大输入电压,Cload为C3和DC/DC电源模块内部电容的总和,Iinrush为允许冲击电流的幅度。
图5 有源冲击电流限制法电路
D1是一个稳压二极管,用来限制MOS管 Q1的栅源电压。元器件R1,C1和D2用来保证MOS管Q1在刚上电时保持关断状态。具体情况是:
上电后,MOS管的栅极电压要慢慢上升,当栅源电压Vgs高到一定程度后,二极管D2导通,这样所有的电荷都给电容C1以时间常数R1×C1充电,栅源电压Vgs以相同的速度上升,直到MOS管Q1导通产生冲击电流。
以下是计算C1和R1的公式:
其中Vth为MOS管Q1的最小门槛电压,VD2为二极管D2的正向导通压降,Vplt为产生Iinrush冲击电流时的栅源电压。Vplt可以在MOS管供应商所提供的产品资料里找到。
MOS管选择
以下参数对于有源冲击电流限制电路的MOS管选择非常重要:
漏极击穿电压 Vds
必须选择Vds比最大输入电压Vmax和最大输入瞬态电压还要高的MOS管,对于通讯系统中用的MOS管,一般选择Vds≥100V
栅源电压Vgs
稳压管D1是用来保护MOS管Q1的栅极以防止其过压击穿,显然MOS管Q1的栅源电压Vgs必须高于稳压管D1的最大反向击穿电压。一般MOS管的栅源电压Vgs为20V,推荐12V的稳压二极管。
导通电阻Rds_on.
MOS管必须能够耗散导通电阻Rds_on所引起的热量,热耗计算公式为:

其中Idc为DC/DC电源的最大输入电流,Idc由以下公式确定:

其中Pout为DC/DC电源的最大输出功率,Vmin为最小输入电压,η为DC/DC电源在输入电压为Vmin输出功率为Pout时的效率。η可以在DC/DC电源供应商所提供的数据手册里查到。MOS管的Rds_on必须很小,它所引起的压降和输入电压相比才可以忽略。
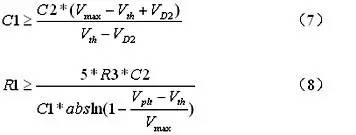
图6. 有源冲击电流限制电路在75V输入,DC/DC输出空载时的波形
设计举例
已知:Vmax=72V
Iinrush=3A
选择MOS管Q1为IRF540S
选择二极管D2为BAS21
按公式(4)计算:C2>>1700pF。选择 C2=0.01μF;
按公式(5)计算:R2=252.5kW。选择 R2=240kW,选择R3=270W<
按公式(8)计算:R1=499.5W。选择 R1=1kW
图6所示为图5 电路的实测波形,其中DC/DC电源输出为空载。
来源:硬件十万个为什么
推荐阅读

添加微信回复“进群”
拉你进技术交流群!
国产芯|汽车电子|物联网|新能源|电源|工业|嵌入式…..
在公众号内回复您想搜索的任意内容,如问题关键字、技术名词、bug代码等,就能轻松获得与之相关的专业技术内容反馈。快去试试吧!
如果您想经常看到我们的文章,可以进入我们的主页,点击屏幕右上角「三个小点」,点击「设为星标」。
欢迎扫码关注