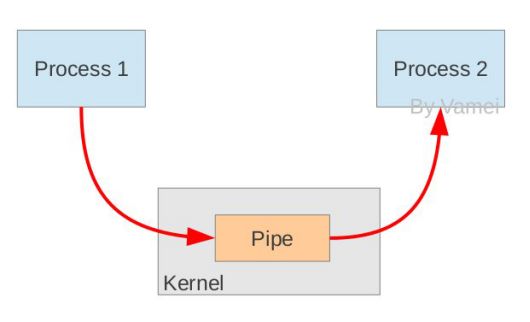
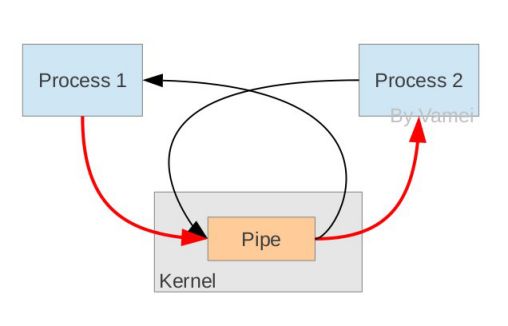
#include <unistd.h>int pipe(int filedes[2]);
int main(void){int n;int fd[2];pid_t pid;char line[MAXLINE];if(pipe(fd) 0){ /* 先建立管道得到一对文件描述符 */exit(0);}if((pid = fork()) 0) /* 父进程把文件描述符复制给子进程 */exit(1);else if(pid > 0){ /* 父进程写 */close(fd[0]); /* 关闭读描述符 */write(fd[1], "\nhello world\n", 14);}else{ /* 子进程读 */close(fd[1]); /* 关闭写端 */n = read(fd[0], line, MAXLINE);write(STDOUT_FILENO, line, n);}exit(0);}
#include <sys/types.h>#include <sys/stat.h>int mkfifo(const char *filename, mode_t mode);int mknode(const char *filename, mode_t mode | S_IFIFO, (dev_t) 0 );
#include <stdio.h> #include <stdlib.h> #include <sys/types.h> #include <sys/stat.h>int main(){int res = mkfifo("/tmp/my_fifo", 0777);if (res == 0){printf("FIFO created/n");}exit(EXIT_SUCCESS);}
int semget(key_t key, int num_sems, int sem_flags);
int semop(int sem_id, struct sembuf *sem_opa, size_t num_sem_ops);· 1
struct sembuf{short sem_num;//除非使用一组信号量,否则它为0short sem_op;//信号量在一次操作中需要改变的数据,通常是两个数,一个是-1,即P(等待)操作,//一个是+1,即V(发送信号)操作。short sem_flg;//通常为SEM_UNDO,使操作系统跟踪信号,//并在进程没有释放该信号量而终止时,操作系统释放信号量};
int semctl(int sem_id, int sem_num, int command, ...);· 1
union semun{int val;struct semid_ds *buf;unsigned short *arry;};
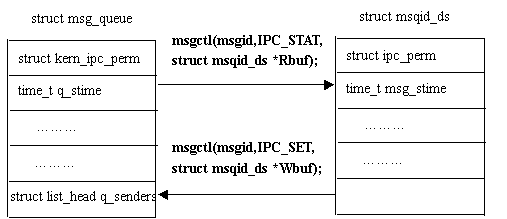
struct msg_queue {struct kern_ipc_perm q_perm;time_t q_stime; /* last msgsnd time */time_t q_rtime; /* last msgrcv time */time_t q_ctime; /* last change time */unsigned long q_cbytes; /* current number of bytes on queue */unsigned long q_qnum; /* number of messages in queue */unsigned long q_qbytes; /* max number of bytes on queue */pid_t q_lspid; /* pid of last msgsnd */pid_t q_lrpid; /* last receive pid */struct list_head q_messages;struct list_head q_receivers;struct list_head q_senders;};
struct msqid_ds {struct ipc_perm msg_perm;struct msg *msg_first; /* first message on queue,unused */struct msg *msg_last; /* last message in queue,unused */__kernel_time_t msg_stime; /* last msgsnd time */__kernel_time_t msg_rtime; /* last msgrcv time */__kernel_time_t msg_ctime; /* last change time */unsigned long msg_lcbytes; /* Reuse junk fields for 32 bit */unsigned long msg_lqbytes; /* ditto */unsigned short msg_cbytes; /* current number of bytes on queue */unsigned short msg_qnum; /* number of messages in queue */unsigned short msg_qbytes; /* max number of bytes on queue */__kernel_ipc_pid_t msg_lspid; /* pid of last msgsnd */__kernel_ipc_pid_t msg_lrpid; /* last receive pid */};
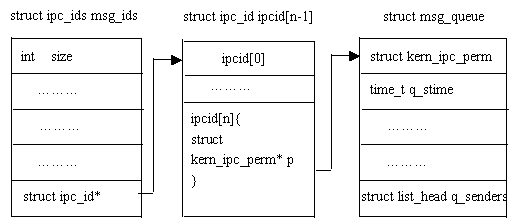
struct kern_ipc_perm{ //内核中记录消息队列的全局数据结构msg_ids能够访问到该结构;key_t key; //该键值则唯一对应一个消息队列uid_t uid;gid_t gid;uid_t cuid;gid_t cgid;mode_t mode;unsigned long seq;}
struct msgbuf{long mtype;char mtext[1];};