

作者简介
从事三相异步电机和永磁同步电机的控制开发工作十余年,精通无感FOC控制。涉及产品包括变频器,伺服,电动工具,吸尘器,螺旋桨,无人机,空压机等。功率范围包括100W~100kW,电压范围包括14VDC~660VAC。
从2020年开始在知乎和公众号做技术分享,一贯的理念是尊重知识,尊重劳动,尊重版权,持续性输出价值。期待所有同行获得足够的报酬,越来越多人愿意从事电机控制行业。目前在闲鱼,CSDN,B站,抖音都有个人IP。
上期文章,解析了瑞萨FOC的上半部分,包括速度环,弱磁,电流环。
有朋友反馈文章深度不够。对此我不否认,也很无奈。到了我这个年纪,家庭的重担和事业的发展都需要兼顾,很多零散的业务我都停掉了。写文章只能当作业余爱好,这篇文章都是我出差的时候在高铁上构思的。
我也很羡慕年轻的朋友,能够不断钻研新技术。我现在这个阶段,更多想到的是事业的发展方向,商务的对接,产品的生命周期,实在没有更多的精力去钻研某些新技术。更多的是把项目落地,把产品做稳定,让客户满意。请各位见谅。
本篇文章解析下半部分,包括位置估算,开环启动,FOC结构。
位置估算
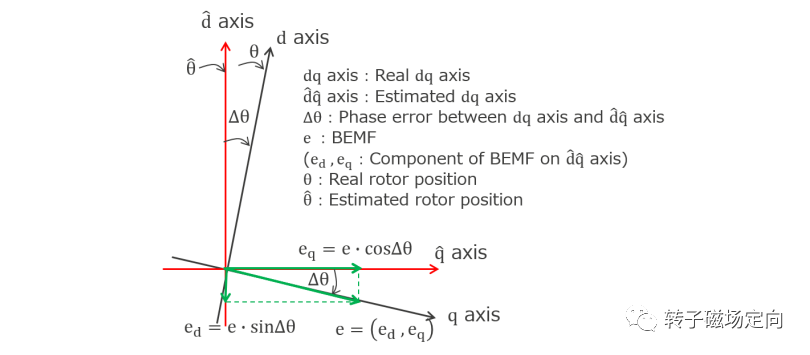
瑞萨的无位置估算是基于BEMF反电势的方法。在d-q旋转坐标系,构建真实dq坐标系和估算的dq坐标系,如下图:
dq坐标系电压方程如下:

把反电势全部等效为扰动,电压方程简化为:

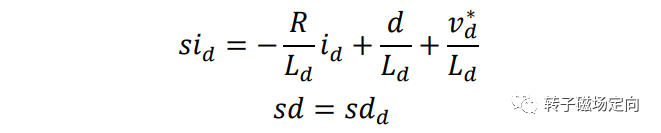
d轴电压方程可以改写为:

d轴电流和电压扰动被视作状态变量,写成如下状态方程的形式:

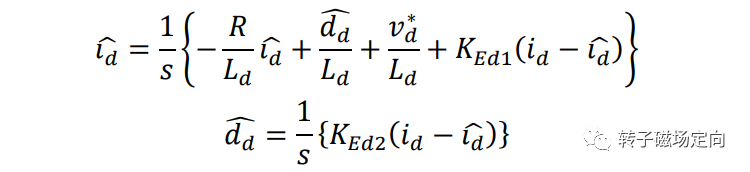
估算电流和估算电压扰动可以写成以下形式:
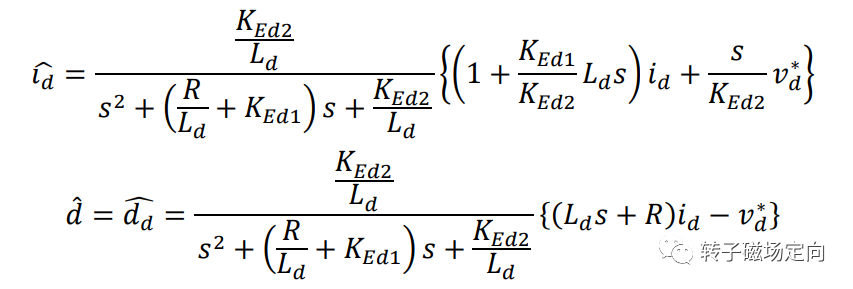
从公式可以看出,^Id和^dd都是输入为Id和V*d二阶系统,其中^dd代表d轴的扰动,^dq代表q轴扰动。
固有频率和阻尼比可以按照如下整定:
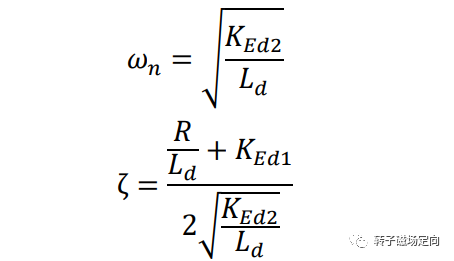
估算增益按照如下设计:
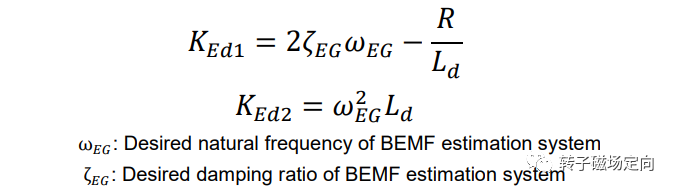
其中Ked1代表d轴估算器的带宽。
估算的状态方程改成成如下形式:
根据状态方程,可以画出整个d轴反电势估算的系统框图:
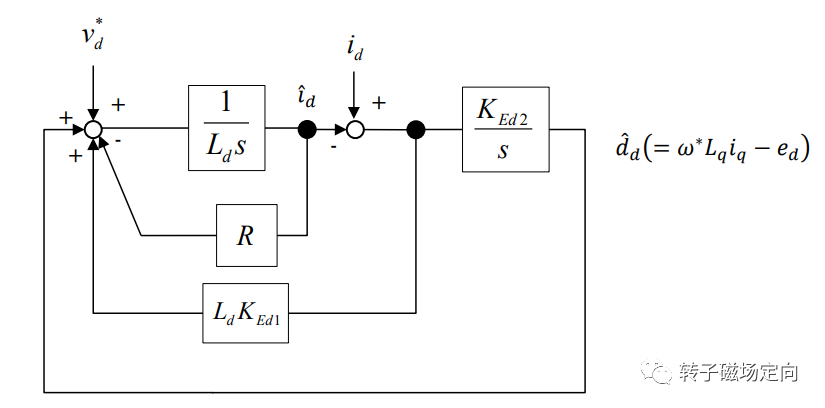
dq轴的电流和电压扰动估算完成后,就得到了dq轴的反电势:
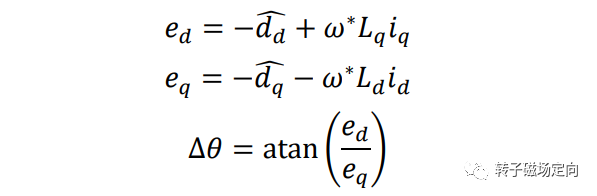
根据实际坐标系和估算坐标系的定义,通过dq估算的反电势作反正切可以计算出估算角度和实际角度之间的角度误差。
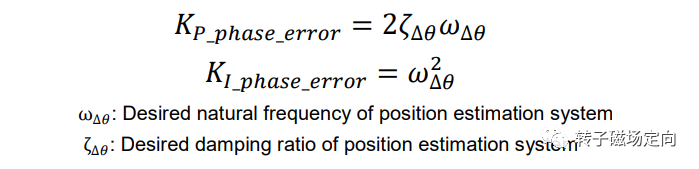
把角度误差送入锁相环,输出估算角度和估算速度:
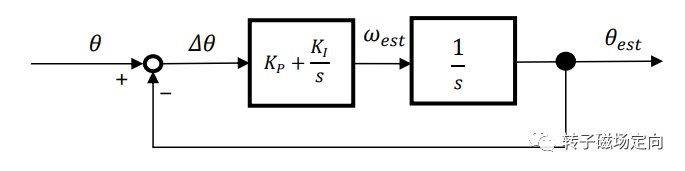
PLL的闭环传递函数如下:
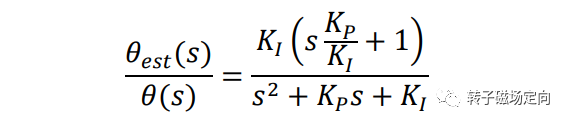
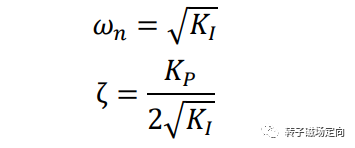
和速度环,电流环,都属于带零点的二阶滞后系统,带宽和阻尼比计算如下:
瑞萨的位置估算,不同于滑模或者龙伯格,也不属于拓展反电势,应该有相关的文章。
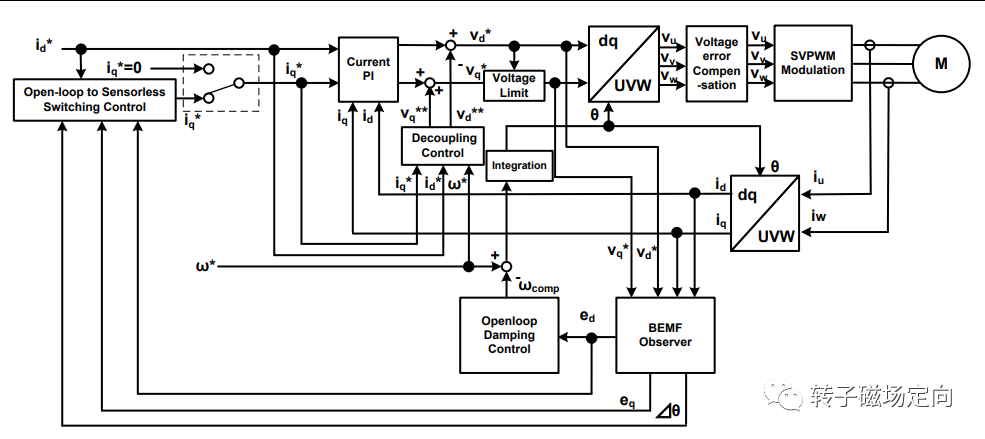
起步阶段,采用开环控制,即I-f阻尼控制,类似功率角补偿,Id固定幅值,Iq=0,电流环加前馈,同时Uq用Ud的计算结果来限制幅值,防止电流环饱和。参考速度加上功率角补偿并积分获得角度,用于电流解耦和坐标反变换。总体框图如下图:
当起步用I-f开环启动之后,切换到闭环FOC控制模式,如下图:
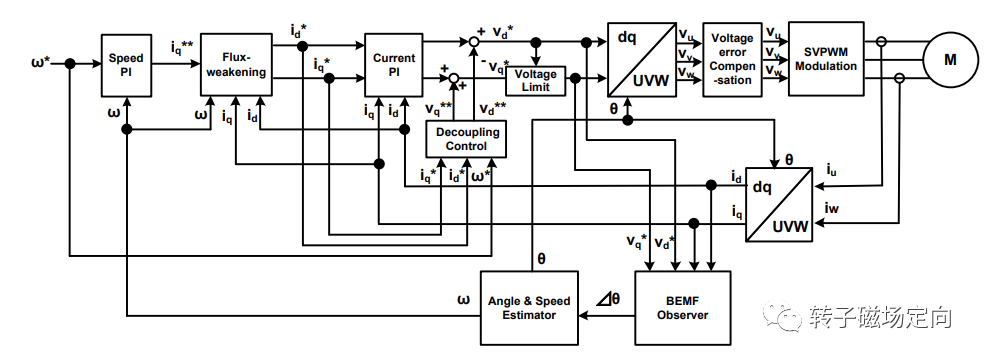
角度估算输出估算角度误差,给到锁相环输出估算速度和估算角度。弱磁需要Id和Iq以及当前速度的共同参与计算。电流环加前馈,Uq用Ud的计算结果限制幅值,反变换之后还要对三相电压加补偿,这个在下文会说到。
在低速区域,瑞萨使用的是开环I-f控制替代FOC,主要是因为低速非线性因素的影响,造成FOC估算存在不可忽略的误差。
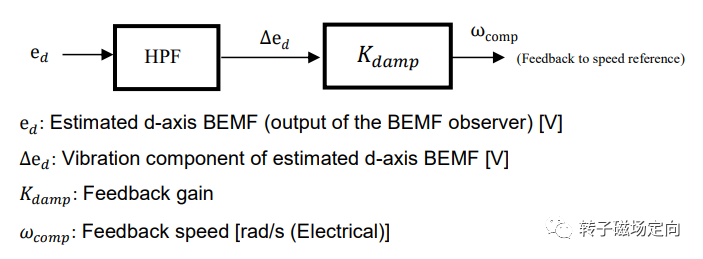
为了解决I-f转矩不稳定带来的振荡,采用了如下的阻尼控制,即提取Eq的高频分量,获得了振荡频率,针对振荡频率对电角度作阻尼补偿,以抑制速度的振荡。
当达到中高速区域,采用反电势模型的FOC估算误差已基本可以忽略,就逐渐从I-f阻尼控制切换到FOC控制。
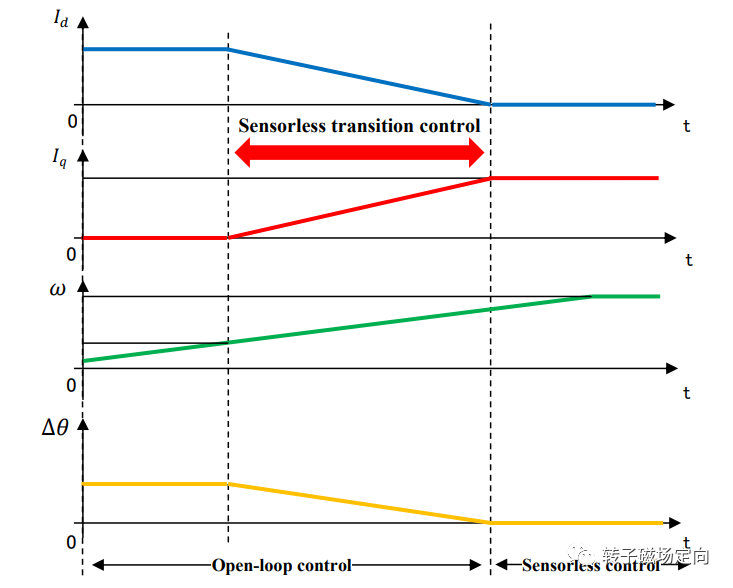
在切换的时候,尤其是重载下,I-f的电角度和实际转子角度误差较大,切换容易引起电流冲击。
为了减小冲击,用角度误差作为环路输入,来计算需要将I-f的角度误差逐渐缩小到0,环路输出赋值给Iq,同时Id逐渐减小。当角度误差收敛到0,切换条件成熟,就直接切换到FOC。Id逐渐下降,Iq逐渐上升,渐变的形式有效地降低了电流冲击。
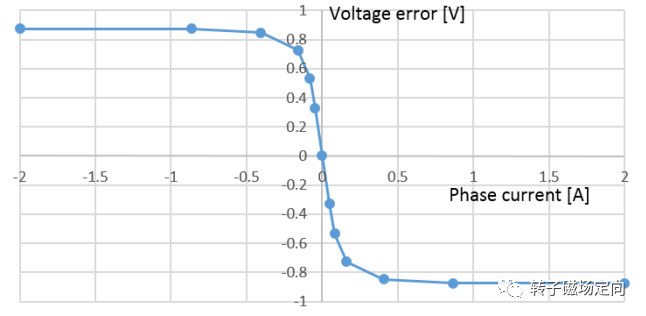
此处的电压误差主要是死区,MOSFET/IGBT开关延时造成的真实输出电压和参考输出电压之间的误差。
电压误差的大小,和电流方向,开关管的开通关断时间,死区时间有关系。如下图,按照瑞萨的思路,似乎是根据电流去标定误差,然后加到电压参考上,而不是单独对死区作补偿。
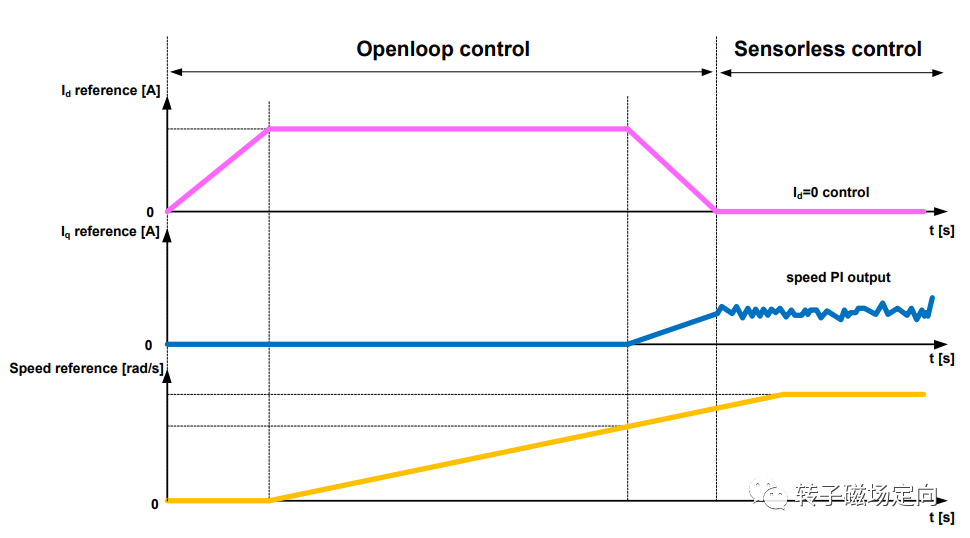
整体的开环I-f启动到切换FOC的逻辑如下图:
走进作者:
电机控制工程师如何拿高薪?
我的买房故事
月薪 4 万人民币是一种怎样的感受?
月入十万难吗?
专业文章:
德州仪器C2000还有市场吗?
2022年电控行业发展趋势
FOC学习的避坑指南
基于M0 MCU的无感FOC航模电机控制
MATLAB到底有多厉害?
基于磁链模型的非线性观测器

