

组合导航是提高导航系统整体性能的有效技术手段。INS/GPS组合导航是当前最常见的组合导航技术,由GPS导航系统和惯性导航系统(Inertial Navigation System,INS)集成,它将两种导航技术进行优势互补,在民用和军用领域得到广泛应用。然而,GPS短期失效环境下,低成本的惯性导航器件测量误差会迅速累积,导致导航精度迅速下降。
据麦姆斯咨询报道,针对该问题,来自上海创感传感技术有限公司等的研究人员设计并研制出了磁感式(MI)地磁传感器辅助惯性组合导航装置,提出了MI/GPS/INS组合导航方法,用地磁信息与加速度信息作为角速度修正量,提高导航定位精度。研究成果以论文形式发表于《物联网技术》期刊。
MI/GPS/INS组合导航装置硬件设计
设计的组合导航硬件装置包含电源模块、数据采集模块、MCU控制单元最小系统电路、调试接口等模块,硬件系统框架如图1所示。
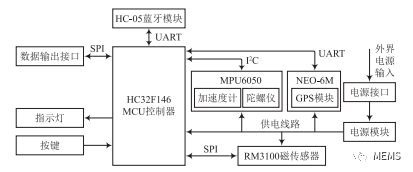
图1 硬件结构框架
组合导航方法
MI/GPS/INS组合导航方法指利用MI传感器修正惯性导航装置的积分误差,以提高GPS失效时的导航精度。组合导航方法流程如图2所示,分为数据采集、数据滤波、数据校正、四元数解算、数据融合等步骤,最终可输出的参数包括姿态欧拉角与轨迹坐标两部分。
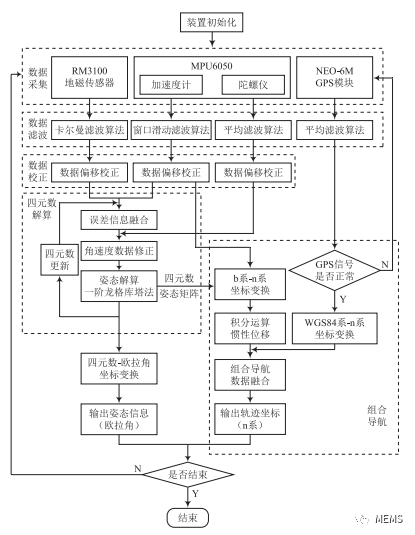
图2 组合导航方法流程
室外导航实验
室外导航实验进行了2组,每组实验分为2次,一次仅采用GPS导航,另一次采用MI/GPS/INS组合导航装置。第一次实验的路径长度为200m,轨迹如图3(a)所示;第二次行走实验的路径长为150m,轨迹如图3(b)所示。从图3可以看出,MI/GPS/INS组合导航方法的导航轨迹比GPS导航更平滑,更接近实际的行走轨迹。因此,当GPS导航有效时,组合导航装置导航精度高于单一的GPS导航。
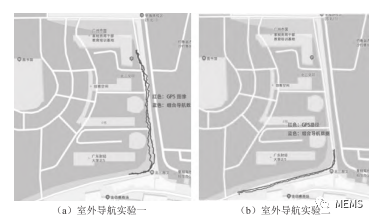
图3 室外导航实验轨迹对比图
室内导航实验
室内导航实验主要验证GPS失效情况下的导航效果,实验1在室内走廊进行,室内为全封闭环境,GPS信号微弱。实验2的室外走廊是一条连接不同教学楼的连廊,属于半室外环境,GPS信号时断时续。从图4可以看出,无论是GPS完全失效环境还是部分失效环境,组合导航的输出轨迹都能准确跟踪真实的行走轨迹,验证了研制的MI/GPS/INS组合导航装置的有效性。

图4 室内组合导航轨迹与真实行走轨迹对比图
总体而言,研究人员设计的磁感式地磁辅助组合导航方法与其他类型地磁辅助导航方式相比,无需地磁图先验信息,且原理简单、计算量小,有效解决了系统的零点漂移、环境干扰和误差累积等问题,在GPS短期失效或断续连接时的导航精确度较高,有效抑制了常规惯性导航误差。
论文链接:
http://dx.doi.org/10.16667/j.issn.2095-1302.2022.06.001


