学完stm32,总是想做点东西“大显身手”一下,智能小车就成了首选项目,其核心只是就是PWM输出,I/O口引脚电平判断。

我们在淘宝上买的那种智能小车底板都是自带tt电机的,不管我们用那种控制方式,首先要做的都是让电机先跑起来。
说到驱动电机,就不得不说一下L298N(电机驱动)了,为什么要说L298N呢?
当时我第一次用电机的时候,也很疑惑,为什么要用L298N,我电机是5v的,直接连上单片机IO口,让其输出高低电平不久能控制电机转动吗????但其实是不是的,IO口确实能输出5V的电压,也确实是和电机的电压一样,但大家不要忽略IO口输出的电流,也就是驱动能力。IO口输出的电流太小了,根本带不动电机啊。。。。举个例子:“可以想象一下让一个小伙子去耕地,他肯定拉不动,但如果给他一头牛,就让小伙拿着小皮鞭赶牛,让牛去耕地,very esay。”
而L298N的作用和刚刚说的“牛”的作用一样,,我们只需用单片机IO口控制L298N的工作,其他的脏活累活全让L298n去做,,好奸商的感觉 哈哈哈哈。
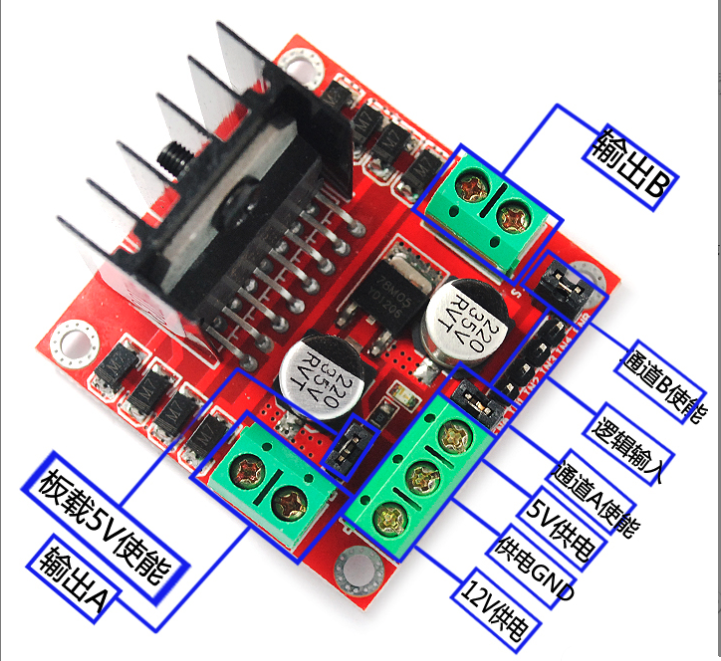
L298n电源接口的接线:
电源12V正极→L298n正极
电源12V负极、单片机GND→L298n的GND
L298n的5V输出→单片机的5V(用L298n产生的5V给单片机供电)
具体如何控制正反转及停止的:简单说IN1、IN2依次输出(0,1)正传,输出(1,1)反转,输出(1,1)制动。
那我们只需要输出不同电平就能驱动电机正反转了,但是为了控制电机的转速,不能单纯的输出1、0,可以用PWM控制,通过调整PWM的占空比,就能控制电机的转速。(很好理解吧,我们日常开私家车,也不是一脚踩足油门,一脚刹车踩到底,而是均匀的升速,或者均匀的降速)这就是PWM的功能。
刚刚已经了解了如何驱动一个电机的转动,那控制小车的前进方向,无非就是四个轮子搭配着运行。
前行:四个轮子都顺转
后退:四个轮子都逆转
左转:左侧两个轮子不动,右边两个轮子往前走。
右转:右侧两个轮子不动,左边两个轮子往前走。
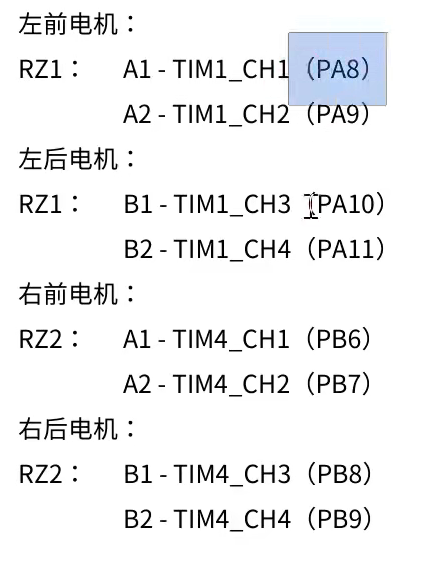
四个电机,需要两个定时器TIM1、TIM4两个定时器产生两路PWM,一路PWM又有四个通道,一共8个通道,因为两个逻辑输入控制L298n的一个电机呀(这8路pwm输出都是连接到L298N的逻辑输入端)。
PWM.C
#include "timer_pwm.h"
#include "led.h"
#include "usart.h"
// TIM1_PWM输出初始化
// TIM1_CH1 = PA8
// TIM1_CH2 = PA9
// TIM1_CH3 = PA10
// TIM1_CH4 = PA11
// TIM1_Reload_Num = TIM1自动重装值
// TIM1_Frequency_Divide = 时钟预分频数
//-----------------------------------------------------------------------------------------------------------------
void TIM1_PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); // 使能TIM1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOB时钟
// 配置IO模式
GPIO_InitStructure.GPIO_Pin = TIM1_CH1_GPIO_PIN | TIM1_CH2_GPIO_PIN | TIM1_CH3_GPIO_PIN | TIM1_CH4_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(TIM1_CH1_GPIO_PORT, &GPIO_InitStructure); // 初始化PA8、PA9、PA10、PA11
//初始化TIM1的计数模式、分频值、重装载值等
TIM_TimeBaseStructure.TIM_Period = TIM1_Reload_Num; // 设置下一个更新事件后,装入自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler =TIM1_Frequency_Divide; // 设置TIM3时钟预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; // 设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); // 根据参数初始化TIM1
//初始化TIM1_CH1-4的PWM
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 比较输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputState_Disable; // 比较输出N不使能
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; // 互补输出极性
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //在空闲时输出低
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset ; //在空闲时互补输出低
TIM_OC1Init(TIM1, &TIM_OCInitStructure); // 数初始化TIM1_OC1
TIM_OC2Init(TIM1, &TIM_OCInitStructure); // 数初始化TIM1_OC2
TIM_OC3Init(TIM1, &TIM_OCInitStructure); // 数初始化TIM1_OC3
TIM_OC4Init(TIM1, &TIM_OCInitStructure); // 数初始化TIM1_OC4
TIM_ARRPreloadConfig(TIM1,ENABLE); // 使能TIM1的自动重装载寄存器
TIM_CtrlPWMOutputs(TIM1,ENABLE); // 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能TIM1在OC1上的预装载寄存器
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能TIM1在OC2上的预装载寄存器
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能TIM1在OC3上的预装载寄存器
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能TIM1在OC4上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); // 使能TIM1
}
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM4_PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//时钟配置
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
// 配置IO模式
GPIO_InitStructure.GPIO_Pin = TIM4_CH1_GPIO_PIN | TIM4_CH2_GPIO_PIN | TIM4_CH3_GPIO_PIN | TIM4_CH4_GPIO_PIN; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(TIM4_CH1_GPIO_PORT, &GPIO_InitStructure);//初始化GPIO
//初始化TIM4的计数模式、分频值、重装载值等
TIM_TimeBaseStructure.TIM_Period = TIM4_Reload_Num; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =TIM4_Frequency_Divide; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM4_CH1-4的PWM
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2(模式二:计数时当计数器值超过设定值时输出有效电平,低于时输出无效电平)
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高(高电平是有效电平,还是低电平是有效电平)
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
TIM_OC2Init(TIM4, &TIM_OCInitStructure);
TIM_OC3Init(TIM4, &TIM_OCInitStructure);
TIM_OC4Init(TIM4, &TIM_OCInitStructure);
//TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器(作用:当要改变占空比时,能否立马生效)
TIM_Cmd(TIM4, ENABLE); //使能TIM3
}
PWM.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
#define TIM1_Frequency_Divide 719 // TIM1时钟预分频值
#define TIM1_Reload_Num 99 // 自动重装载寄存器的值
#define TIM4_Frequency_Divide 719 // TIM1时钟预分频值
#define TIM4_Reload_Num 99 // 自动重装载寄存器的值
//左前电机
#define TIM1_CH1_GPIO_PIN GPIO_Pin_8
#define TIM1_CH1_GPIO_PORT GPIOA
#define TIM1_CH1_GPIO_CLK RCC_APB2Periph_GPIOA
#define TIM1_CH2_GPIO_PIN GPIO_Pin_9
#define TIM1_CH2_GPIO_PORT GPIOA
#define TIM1_CH2_GPIO_CLK RCC_APB2Periph_GPIOA
//左后电机
#define TIM1_CH3_GPIO_PIN GPIO_Pin_10
#define TIM1_CH3_GPIO_PORT GPIOA
#define TIM1_CH3_GPIO_CLK RCC_APB2Periph_GPIOA
#define TIM1_CH4_GPIO_PIN GPIO_Pin_11
#define TIM1_CH4_GPIO_PORT GPIOA
#define TIM1_CH4_GPIO_CLK RCC_APB2Periph_GPIOA
//右前电机
#define TIM4_CH1_GPIO_PIN GPIO_Pin_6
#define TIM4_CH1_GPIO_PORT GPIOB
#define TIM4_CH1_GPIO_CLK RCC_APB2Periph_GPIOB
#define TIM4_CH2_GPIO_PIN GPIO_Pin_7
#define TIM4_CH2_GPIO_PORT GPIOB
#define TIM4_CH2_GPIO_CLK RCC_APB2Periph_GPIOB
//右后电机
#define TIM4_CH3_GPIO_PIN GPIO_Pin_8
#define TIM4_CH3_GPIO_PORT GPIOB
#define TIM4_CH3_GPIO_CLK RCC_APB2Periph_GPIOB
#define TIM4_CH4_GPIO_PIN GPIO_Pin_9
#define TIM4_CH4_GPIO_PORT GPIOB
#define TIM4_CH4_GPIO_CLK RCC_APB2Periph_GPIOB
void TIM1_PWM_Init(void);
void TIM4_PWM_Init(void);
#endif
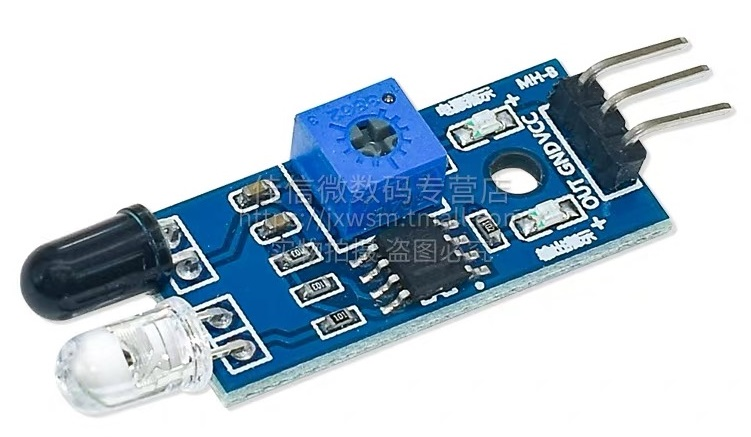
本项目采用三个红外循迹模块。
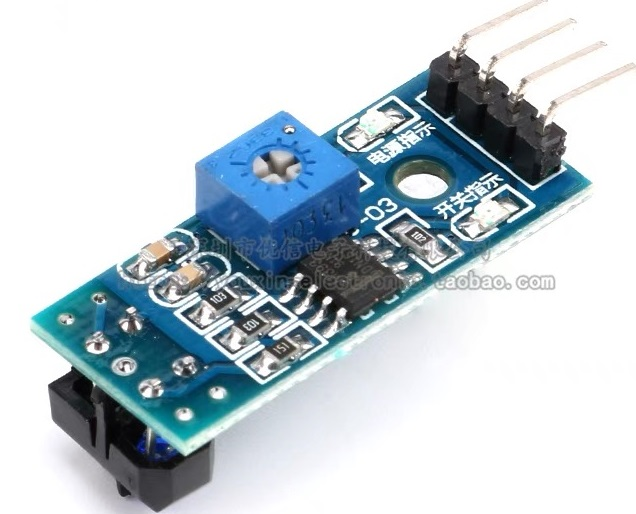
其原理很简单,未碰到黑线(接收到红外光):对应状态 = 0碰到黑线(未接收到红外光):对应状态 = 1
也就是说,正常沿着黑线行驶,循迹模块输出高电平。当偏离黑线时,循迹模块输出低电平。我们只需采集引脚电平,当左侧出现低电平时,让小车向右转一点调整一定的角度。当右侧出现低电平时,让小车向左转一点调整一定的角度。
trail.c(循迹)
#include "trail.h"
u8 S_Trail_Input = 0 ; // 三个寻迹模块的返回值
// 红外寻迹初始化(将PB3、PB4、PB5初始化为上拉输入)
// Trail -- PB3
// Trai2 -- PB4
// Trai3 -- PB5
//----------------------------------------------------------------------------------------------
void Trail_Input_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOB端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟使能
//PB3、PB4默认设置JTCK引脚,释放为通用GPIO口
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 复用时钟使能
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); // 将PB3、PB4释放为通用GPIO口
// 寻迹:Trail--PB3、PB4、PB5端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5; // Trail--PB3、PB4、PB5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
//GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输入模式不需要设端口速度
GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化PB3、PB4、PB5
}
//----------------------------------------------------------------------------------------------
// 黑线寻迹函数
// S_Trail_Input的低三位分别对应[PB5、PB4、PB3]的状态值
// 未碰到黑线(接收到红外光):对应状态 = 0
// 碰到黑线(未接收到红外光):对应状态 = 1
//----------------------------------------------------
void Trail_black_line(void)
{
S_Trail_Input = 0 ;
S_Trail_Input = (((u8)GPIOB->IDR) & 0x38)>>3;
}
//----------------------------------------------------
trail.h
#ifndef __TRAIL_H
#define __TRAIL_H
#include "stm32f10x.h"
// S_Trail_Input的低三位分别对应[PB5、PB4、PB3]的状态值
// 未碰到黑线(接收到红外光):对应状态 = 0
// 碰到黑线(未接收到红外光):对应状态 = 1
//-----------------------------------------------------
extern u8 S_Trail_Input ; // 三个寻迹模块的返回值
//-----------------------------------------------------
// 黑线寻迹情况
//---------------------------------------------------------------------
#define Not_Find_Black_Line 0x00 // 未发现黑线
#define Middle_Find_Black_Line 0x02 // 中间发现黑线
#define Left_Find_Black_Line 0x01 // 左侧发现黑线
#define Left_Middle_Find_Black_Line 0x03 // 左中侧发现黑线
#define Right_Find_Black_Line 0x04 // 右侧发现黑线
#define Right_Middle_Find_Black_Line 0x06 // 右中侧发现黑线
#define Left_Right_Find_Black_Line 0x05 // 左右侧发现黑线
#define All_Find_Black_Line 0x07 // 全部发现黑线
//---------------------------------------------------------------------
void Trail_Input_Init(void); // 红外寻迹初始化
void Trail_black_line(void); // 黑线寻迹函数
#endif /* __TRAIL_H*/
原理与红外循迹差不多,用了三个避障模块。
网上还有很多其他楼主,是用的一个舵机带动一个超声波避障模块做的,但是那种遇到障碍时,必须停下来,然后转动舵机 从而让超声波避障模块转动,测那边没有障碍,从而往那边走。
而我们这种设计不需要停下小车再去判断,在行使的过程中直接判断。
elude.c (避障)
#include "elude.h"
u8 S_Elude_Input = 0 ; // 三个红外避障模块的返回值
// 红外避障初始化(将PA1、PA2、PA3初始化为上拉输入)
// Elude_左 -- PA1
// Elude_中 -- PA2
// Elude_右 -- PA3
//----------------------------------------------------------------------------------------------
void Elude_Input_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // GPIOB时钟使能
// 避障:Elude--PA1、PA2、PA3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3; // Elude--PA1、PA2、PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
//GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输入模式不需要设端口速度
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化PA1、PA2、PA3
}
//----------------------------------------------------------------------------------------------
// 红外避障检测函数
// S_Elude_Input的低三位分别对应[PA3、PA2、PA1]的状态值
// 未遇到障碍(未接收到红外光):对应状态 = 1
// 遇到障碍(接收到红外光):对应状态 = 0
//-------------------------------------------------------------
void Elude_detect_barrier(void)
{
S_Elude_Input = 0 ;
S_Elude_Input = (((u8)GPIOA->IDR) & 0x0E)>>1;
}
//-------------------------------------------------------------
elude.h
#ifndef __ELUDE_H
#define __ELUDE_H
#include "stm32f10x.h"
// S_Elude_Infrared_Input的低三位分别对应[PA3、PA2、PA1]的状态值
// 未遇到障碍(未接收到红外光):对应状态 = 1
// 遇到障碍(接收到红外光):对应状态 = 0
//--------------------------------------------------------------
extern u8 S_Elude_Input ; // 三个避障模块的返回值
//--------------------------------------------------------------
// 红外避障情况
//-----------------------------------------------------------------
#define Not_Find_Barrier 0x07 // 未发现障碍
#define Middle_Find_Barrier 0x05 // 中间发现障碍
#define Left_Find_Barrier 0x06 // 左边发现障碍
#define Left_Middle_Find_Barrier 0x04 // 左中侧发现障碍
#define Right_Find_Barrier 0x03 // 右边发现障碍
#define Right_Middle_Find_Barrier 0x01 // 右中侧发现障碍
#define Left_Right_Find_Barrier 0x05 // 左右测发现障碍
#define All_Find_Barrier 0x00 // 全部发现障碍
//-----------------------------------------------------------------
void Elude_Input_Init(void); // 红外避障初始化
void Elude_detect_barrier(void); // 红外避障检测函数
#endif /* __ELUDE_H*/
作者:最穷不过要饭、不死总会出头
链接:https://blog.csdn.net/m0_59113542/article/details/123811441
来源:
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
推荐阅读
01 |加入嵌入式交流群 |
02 |嵌入式资源获取 |
03 |STM32中断优先级详解 |
04 |STM32下载程序新思路--使用串口下载程序 |