在前面《浅谈高阶智能驾驶-领航辅助的技术与发展》中,我们介绍了领航辅助的功能和发展前景,而大多数主机厂实现领航辅助,都需要基于高精度地图。今天就简单介绍一下,车载导航的简史 - 从服务人的卫星定位地图到服务车的高精地图。
从服务人到服务汽车
导航,想象一下我们身处一个完全陌生的地方,想要去另一个地方,我们主要需要解决三个问题:1. 我在哪儿(定位) 2. 我的目的地在哪儿 3. 我要怎么过去(路径规划)。
要解决“我在哪儿”的问题,也就是定位。定位分为相对定位和绝对定位。在GPS出现之前,我们的定位方式都是相对定位,比如说基于某座山,某条路,某条河,对比前人测绘出来的地图,来判断我们身处什么位置。我们日常生活中,如果不借助导航软件的话,人类的思维习惯就是通过视觉观察周围的环境,某栋楼,某个地标,某个车道标志等来判断自己所处的位置。
相对定位的局限性在于,如果视觉场景中没有相对标志性的物体,人类就无法判断自己在什么位置了。比如沙漠,草原,森林,或者未开发的建筑比较少的郊区,或者城市的高楼建筑群,此时人的视觉范围内都是千篇一律的场景,自然无法判断自己的位置。而GPS的出现就解决了这个问题。
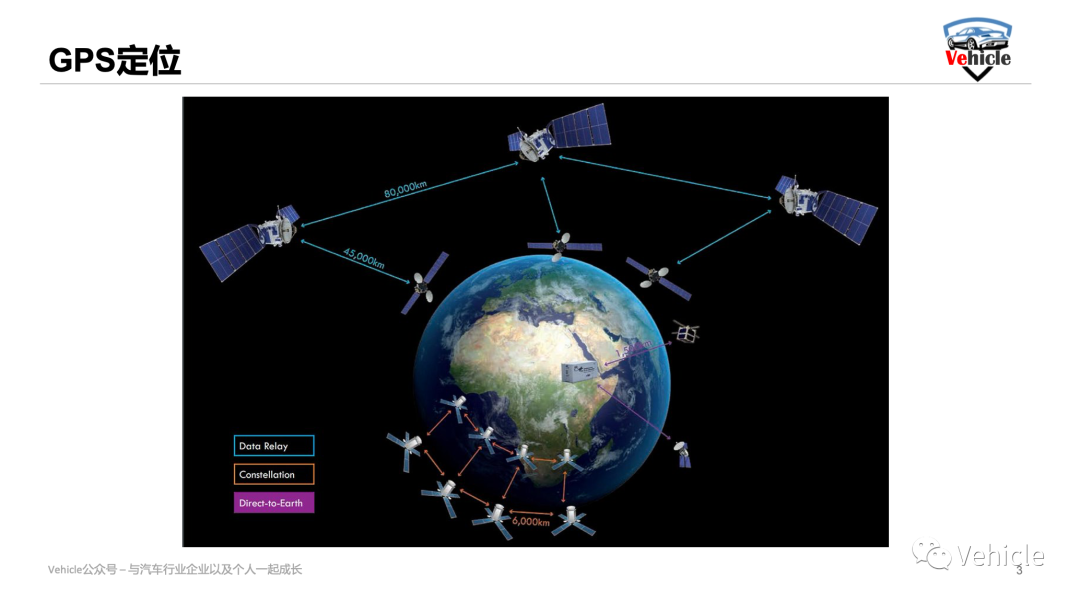
GPS 的全称是导航星测时和测距全球定位系统,简称全球定位系统(Global Position System,GPS)。我们经常在文章中看到的GNSS,是全球卫星导航系统(GNSS)是卫星导航的统称,是除了GPS以外,还包含目前俄罗斯的GLONASS、中国的北斗,欧洲的伽利略这四大导航系统。
GPS定位的基本原理是根据高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方交会的方法,确定待测点的位置。这个原理解释起来比较复杂(其实我也没太看懂),我们可以简单理解为,天上有至少24颗卫星,保证我们在地球任意一个位置都能至少接收到4颗卫星的信号,通过4颗卫星相对地球的位置,定位出我们相对于地球的绝对位置,也就是我们初中地理学过的经度和纬度。
有了GPS以后,我们就可以实现电子导航了。第一代电子导航大约出现在2000年左右,当时的电子导航地图还需要先将所在城市的地图下载到本地。车载GPS导航系统内置的GPS天线收到GPS的数据信息,结合储存在车载导航仪内的电子地图,通过GPS卫星信号确定的位置坐标与此相匹配,进行确定汽车在电子地图中的位置。
第一代车载电子导航有两个主要问题:
随着互联网的发展,出现了第二代电子导航,也就是我们目前日常使用的电子导航,基本解决了这两个问题。首先是本地数据联网,引入了大数据和云计算,规划路线时可以考虑实时交通,还能预估路上所需时间。同时更新地图可以通过OTA进行,2-3个月就可以更新一次,基本满足日常需求。
GPS的出现,算是解决了绝对定位的问题。但是,GPS的精度通常只有10米级。要知道标准城市道路宽度为3.5m-3.75m,双向4车道宽度也就是15米左右。这就意味着,仅仅依靠GPS定位,只能判断车子在哪条路上,无法判断车子在哪条车道上,车主驾驶时就会遇到变道不及时,走错车道等情况。所以,我们需要寻求其他技术来实现更精确的定位。
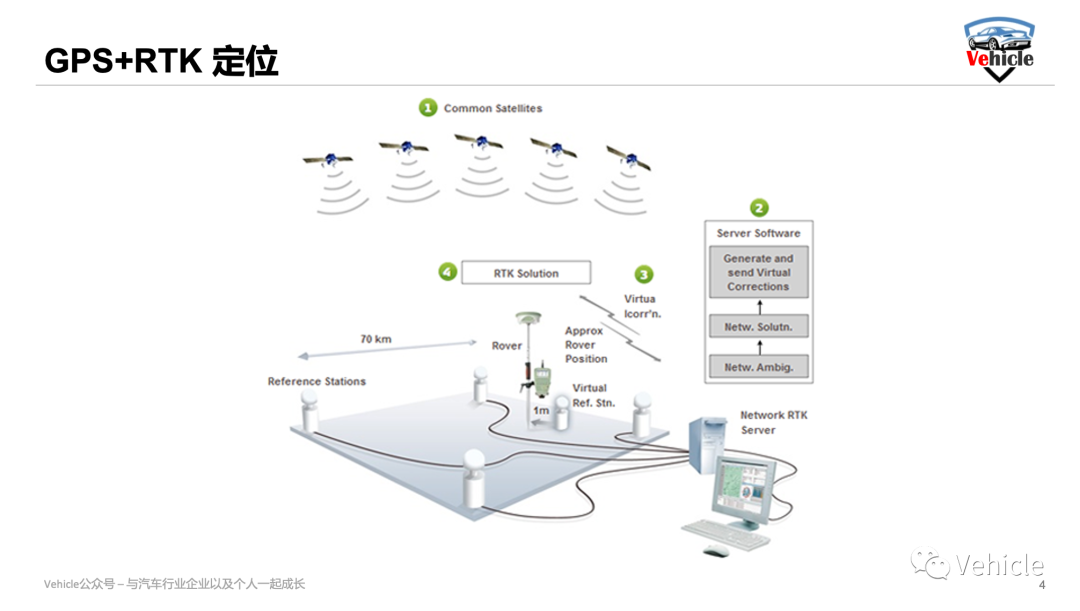
RTK( Real Time Kinematic),实时动态测量技术,是以载波相位观测为根据的实时差分GPS(RTDGPS)技术,它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、 流动站接收机三部分组成。 在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。(以上来自百度百科)
是不是觉得每个字都看得懂,但连成句子以后完全看不懂?没关系,我也看不懂。我在网上找了一张图。可以简单理解为:增加了一些固定的基站,这些基站相当于一个绝对定位的参考系。基站附近的移动物体可以从基站收到信号,结合自身收到的GPS信号,从而矫正自身卫星定位结果,实现亚米级定位。RTK的供应商国内第一的就是千寻位置,全国建立超过2600个地基增强站,这个可以在很多位置可以覆盖高精度定位。对了,千寻也是阿里巴巴投资的,持股占比41.9%。
定位问题解决了,但是我们日常使用手机导航的时候也会发现,在很多地方,比如天桥,隧道,高楼,手机APP会提示GPS信号弱。这时候,就需要IMU惯性导航定位来辅助了。
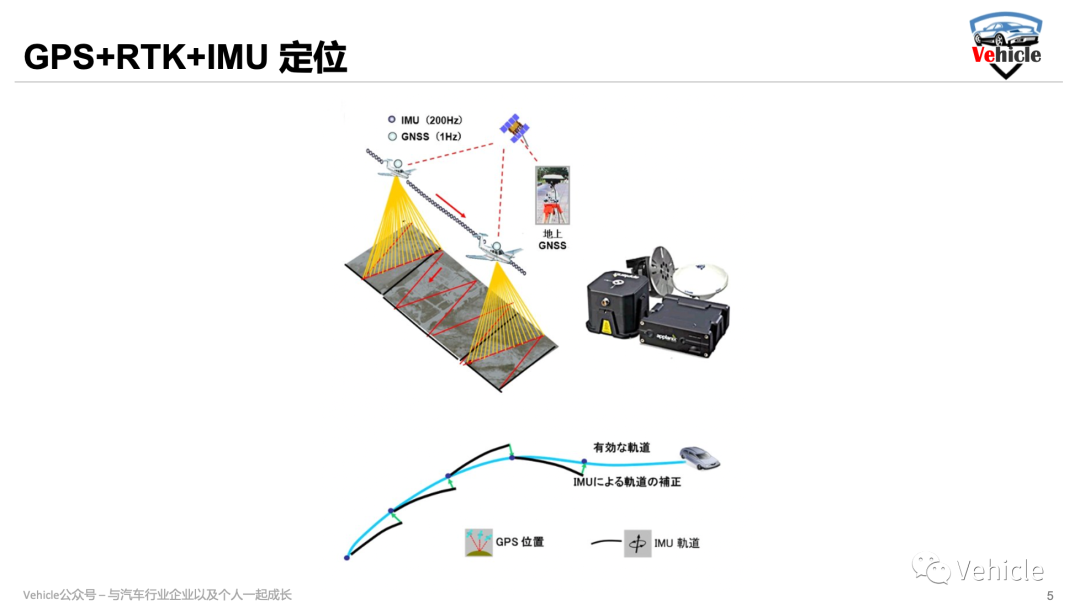
IMU(Inertial Measurement Unit),即惯性测量单元,用于测量物体三轴姿态角(或角速率)以及加速度。利用惯性元件(加速度计)来测量运载体本身的加速度,经过积分和运算得到速度和位置,从而达到对运载体导航定位的目的。组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。(百度百科)
简单理解:想象你走进了一个漆黑的隧道里,假设你估计自己每秒中跨出去一步,一步距离为0.5米,你心中默念10秒,那么你可以估算自己此时的位置距离隧道口为5米。这样,虽然你看不见周围物体,但依然可以知道自己大致位置。当然,由于步长的误差和读秒的误差,走得越远,跟实际位置的误差就越大。
上面的场景是一个一维空间的运动,把这个场景替换为三维的,通过IMU得到的线速度和角速度,我们就可以知道自己在三维空间中的相对位置。这就是惯性导航的原理。
惯性导航可以实现对GPS的补偿,在一些GPS信号比较弱,或者GPS更新频率较低的场景下,可以实现一段时间内的自主导航。当然,这个时间不能太长,否则就不精确了。
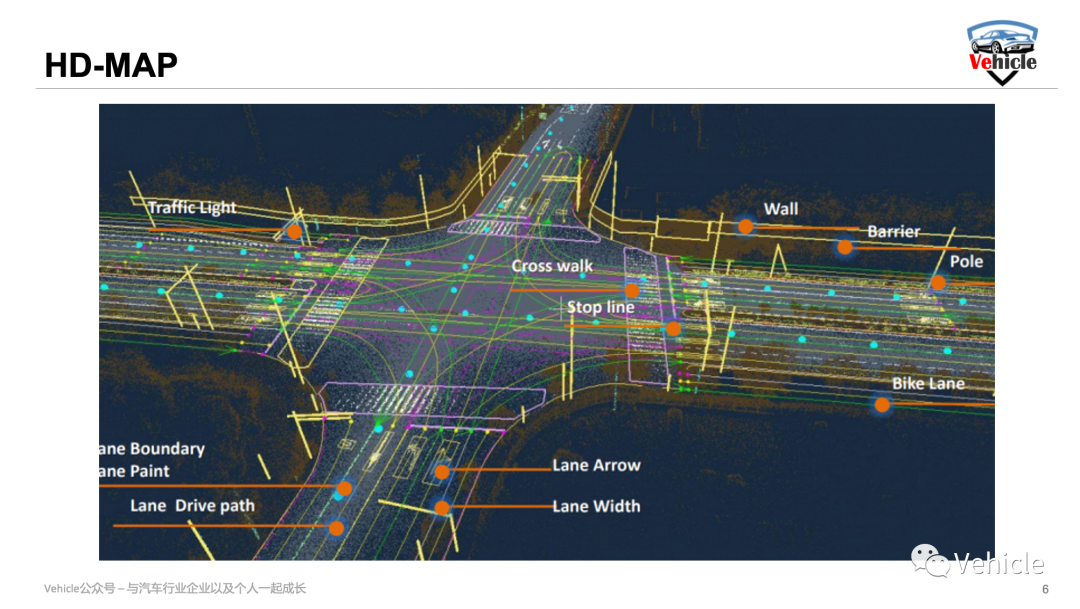
而随着自动驾驶技术的出现,高精度地图(High definition)需求也应运而生。传统地图是服务于人,主要起到辅助驾驶员判断大致位置的作用,车辆的控制还是由驾驶员来操作,因此其精度一般只需要做到10米级。而自动驾驶汽车需要精确知道车辆在路上的位置,这个位置需要精确到在哪个车道,跟路边隔离带,马路牙子距离多少,这就要求地图的精度越高越好,甚至需要做到厘米级。高精度地图含有大量道路矢量元素信息(车道线位置、类型、宽度等)以及车道周边的固定对象信息(交通信号灯、交通标志、障碍物、路边地标等),形成对路网精确的三维表征(厘米级精度),比如路面的几何结构、道路标示线的位置、周边道路环境的点云模型等。高精度地图在L3级别以上的辅助/自动驾驶承担着重要任务:
说了这么多,可以简单理解为:传统地图服务的是人,人可以根据对突发事件和信息进行加工处理。而高精度地图服务的是机器,计算机做出正确决策需要基于实时的准确的信息的输入,因此要求地图的高精度,和高频率更新。
2-地图图商们发生了哪些商战往事?
车载导航从进入汽车圈开始,图商们的厮杀也就开始了。
2000年,丰田曾向外透露,一套丰田汽车电子导航系统,在日本的售价折合人民币1万多元。而中国的汽车市场从2000年开始进入一个高速增长期,从2001年的年产200多万辆增长到了2009年的千万辆级别,年均增长速度达21.6%。到2010年底,我国汽车产量和销量更是双双突破了1800万辆。这使得电子地图成为一座金矿。在那个智能手机还未出现的年代,图商靠着汽车生意活得非常滋润。2013年,在导航前装市场,四维图新连续七年分走超60%的市场份额,而凯立德则在后装市场拿到了超过70%的份额。
电子地图这座金矿很快吸引了互联网巨头。2013年阿里收购了高德。百度地图直接倒贴钱给手机厂商让他们预装百度地图,逼得高德地图也不得不给手机厂商补贴。
2013年8月,百度突然宣布,原本收费30元的百度导航APP永久免费,且对已经付费用户全额退款。约4小时后,高德地图也宣布导航免费。免费策略直接导致高德2013年全年亏损1.55亿元。
互联网巨头对战,旁人遭殃。曾经的导航巨头凯立德坚持收费模式,一直到2016年才依依不舍的给用户免费使用,但市场份额已经丢光。2017年凯立德连续三年亏损,亏损额度高达1.85亿元,于2018年从新三板退市。另一个导航一哥四维图新,从曾经的前装市场70%份额,2018年下跌到38%(数据来源:新浪财经)。
在移动互联时代,导航地图市场基本被BAT三家垄断。
但自动驾驶的兴起,使得地图格局有了进一步变化的可能。
3-高精地图有哪些难点?
实时,精度
前文提到,高精度地图要求更高的精度和更高的更新频率。
高精地图需要的是动态和半动态数据,但现在市面上的产品还很难做到如此实时。现在的高精地图,例如高德和百度等,只覆盖了全国的高速公路及城市快速路,也只能做到3个月更新一次。
而限制图商们高精度地图覆盖范围和更新频率的,就是成本。其成本主要分以下几大块:
首先是地图采集成本,光是一辆搭载了大量激光雷达、高清摄像头等传感器的地图测绘车,就往往需要百万元甚至上千万。据网上资料显示,一辆采集车搭载6台CCD相机,环形分布5个,顶部一个,每个摄像头像素500万,总像素3000万,采集数据精度约50CM。另外,车辆后备箱内放置工况机,主要是为了存储和处理拍摄回的相关道路数据用。高德相关工作人员介绍,搭载该摄像头组合的采集车是目前高德数据采集车的主力,6个摄像头能采集到道路相关信息的全景画面。由于激光扫描仪及与其匹配的定位定姿仪的成本极高,该高精度地图采集车的硬件成本约800万。

高德在2015年一口气购置了五六辆测绘车,组成了一支车队。但光靠这么几辆车,就连把主要城市跑一遍都不现实。
另外,车队的养护成本,随车测绘人员的人力成本也极高。
中国拥有全世界最复杂的城市道路系统,即使是各个互联网巨头,也烧不起钱把全国的地图扫完。大部分图商都是从高速公路开始,这也是为什么目前领航辅助基本上只能在部分高速公路路段使用。
除了采集成本,更庞大的成本在于后期维护。
高精地图对数据的“鲜度”要求非常高,需要实现日更甚至分钟级的更新,这样才能保证数据的准确,避免因为数据更新不及时而让汽车做出错误的决策。图商不可能为了更新地图,让采集车再去跑一遍。效率上无法满足更新频率的要求,成本上更是不可能承担得起。业内共识是高精度地图的更新需要依靠众包,就是把地图更新的任务交给道路上行驶的大量非专业采集车辆,利用车载传感器实时检测环境变化,并与高精度地图进行比对,当发现道路变化时,将数据上传至云平台,再下发更新给其他车辆,从而实现地图数据的快速更新。下图就是国外Mobileye的高精度地图众包采集方案。

最后,是牌照这道槛。地图行业涉及国家机密,要自主绘制高精度地图,必须具备相关资质。据泰伯网不完全统计,目前共有31家企业获批导航电子地图制作甲级测绘资质。

▶️图片来自于泰伯网
不过,甲级测绘牌照存在有效期,到期后需要复审。而目前国家对于地图测绘资质的监管正在收紧。一个不好的消息是,今年3月份,自然资源部公布了导航电子地图制作甲级测绘资质复审换证结果,小鹏投资的智途科技,上汽旗下的中海庭,东风的立得空间,以及Momenta等8家企业都还未通过。
4-高精地图市场未来走势?
高精度地图的市场预期——赢者通吃
前文分析了高精度地图的门槛——成本问题。那么,为什么互联网巨头纷纷入局高精度地图。高精度地图的市场预期有多大呢?
这里我翻到了一份来自国泰君安证券2018年的分析报告。分析认为:由于高精度地图具体收费模式及金额仍未完全确定,因此报告中较保守的采用前期1000元license、100元年服务费作为预测基础,保守估计2025年正常情况应用于L3自动驾驶汽车的高精度地图产业空间为30亿元,乐观情况下为50亿元,悲观情况为9.4亿。
看起来很诱人是不是?
可惜,2019年4月11日,高德,高德决定在“自动驾驶开发测试阶段高精度地图数据免费”的政策基础上,即日起大幅降低高精地图数据在车型量产阶段的商业化应用价格,承诺标准化高精地图每车年费价格不超过100元。
高德同时承诺,随着后续搭载辅助驾驶、自动驾驶功能车型规模的不断增加,每年还将提供不低于2%的降本幅度。
据业内人士透露,其他图商一般会报到7-800元/车/年。高德此举一下子将价格拉到了市场价的15%。
为什么高德这么着急宣布高精度地图费用不超过100元/年?
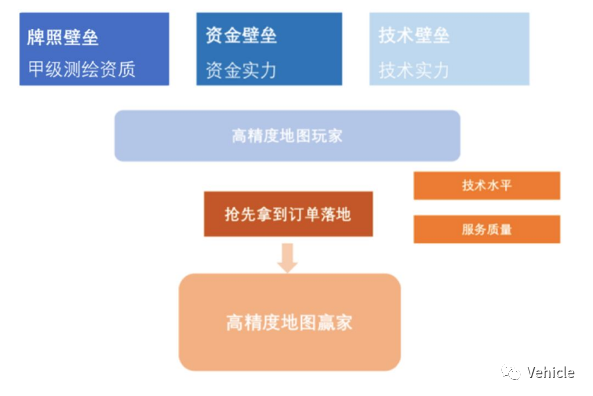
跟互联网产品一样,高精地图具有明显的双边网络效应:用户越多,数据越完整,地图的质量就越高,进而能吸引更多的用户。这样的产品,天然适合垄断。
前文已经提到高精度地图的维护主要靠众包。对于高精度厂家来说,先拿到订单并完成落地,有利于降低成本,进而降低价格,吸引更多的订单,扩大的自己优势。搭载高精度地图的自动驾驶车辆配有行车记录仪,在车辆行驶过程当中即可采集数据信息回传至图商处完成更新,不再需要另外雇佣车辆。因此,优先拿到高端车厂订单的图商可以利用搭载高精度地图和行车记录仪的汽车来动态更新数据,更快降低成本,再通过降价吸引中低端车厂,不断扩大自己的优势。
总而言之,越早拿到更多的订单并实现落地,越容易降低成本并提高地图新鲜度,从而获取更多订单,赢者通吃。
据IDC数据显示,2020年百度、四维图新(腾讯持股)、易图通、高德(阿里)市场份额占比分别为28.07%,21.61%,16.15%和13.07%。四家合计占到78.9%。高精地图边际成本几乎为零,未来行业集中度提升是必然趋势。

▶️图片来自于零壹智库
互联网大厂在这一领域继续打起了一贯以来的价格战,没有背靠大厂的其他初创公司,很难经得起这样烧钱。高精度地图的未来竞争,恐怕还是会围绕BAT三家展开,留给其他入局者的机会并不多。
5-高精地图是不是智能驾驶的必须?
另类玩家——特斯拉的FSD方案
大部分车厂在布局自动驾驶时,都认为高精度地图是实现自动驾驶必不可少的部分。
但特斯拉是个例外,我们在《摄像头,雷达和特斯拉》也介绍过。
在Twitter上,马斯克已经不止一次表示过,依赖高精度地图的自动驾驶解决方案太过于针对明确且具体的路况,一旦去到高精地图没有覆盖的区域或因施工、事故导致的道路调整就没用了,从而就失去“自动驾驶”的意义了。
特斯拉的FSD把摄像头的视觉系统作为核心,采用的是视觉+毫米波雷达的感知方案,识别出周围环境来判断车辆的相对位置。这种方式跟人类驾驶员的思维方式比较像,因此也有一部分人认为:高精度地图不可能保证时时更新,特斯拉的FSD才是自动驾驶的终极解决方案。
智能网联汽车高精地图 白皮书 - 自动驾驶地图与定位工作组
知乎专栏:自动驾驶的高精度地图, 阿宝说车
*未经准许严禁转载和摘录-获取参考资料方式:

相关推荐
从理想L9交车前的多次“事故”,谈谈问题到底出在哪里?
汽车操作系统102
做汽车的吉利为何搭上做手机的魅族?
宝马的纯电优先新攻势“Neue Klasse”2025
福特电气化战略升级- 2023年60万辆,引入宁王的LFP电池
