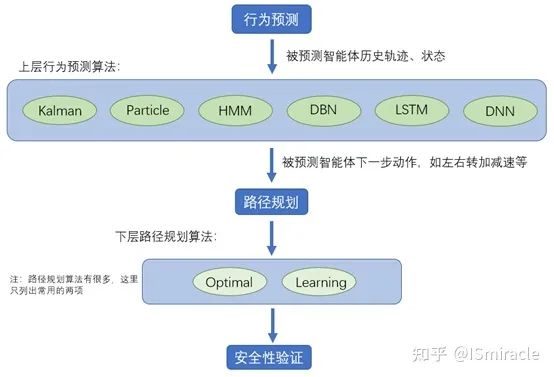
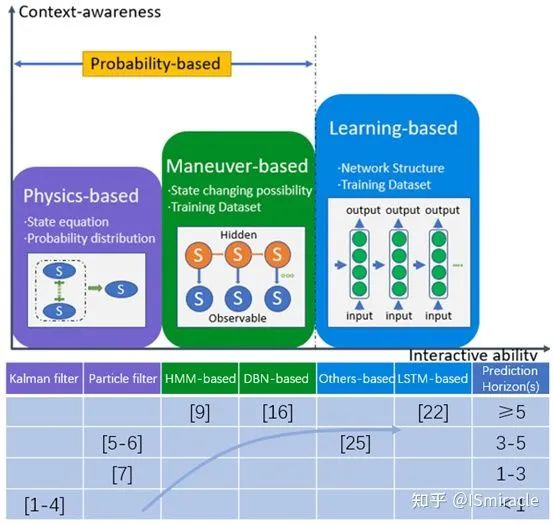
图2:常用决策控制框架单车决策控制一般可分解为行为预测、轨迹规划、风险评估三大子类,如图2所示。本文主要针对前两个问题。研究行为预测的方法又可分为Probability based approaches and Learning-based approaches,本节将按照以上两种方法进行细化讨论,并给出发展趋势如图4所示,其中横坐标为方法反应车车交互的能力,纵坐标为方法还原场景复杂度或真实度的能力,表格给出各方法在预测时域这一定量指标下的大概趋势。标中所列文献均保证了一定条件下相差不多的精确度,区分标准除了预测时域也可以用预测距离。图3:各类方法的演变趋势与特征变化
2.1 Probability based approaches
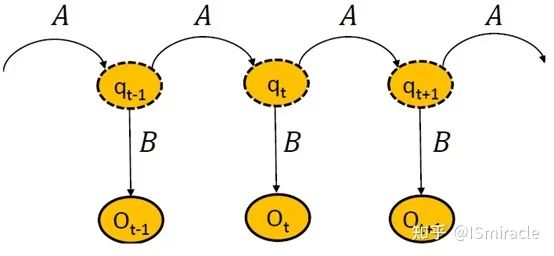
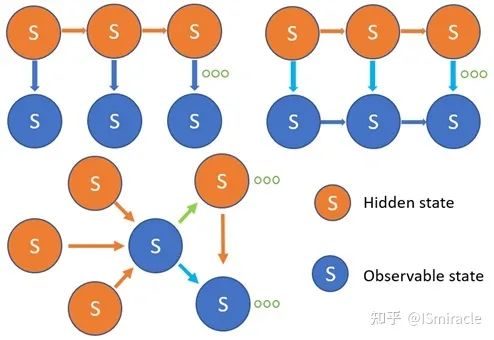
## 2.1.1 Physics-based approaches早期(2000-2010)针对上述三大问题的解决方案主要是基于运动学与动力学原理对ego-vehicle或者other vehicles进行建模,对于其运动状态带来的不确定性常被假设为正态分布[1-4],由此引入“高斯噪声”的概念。有关假设不确定性为正态分布的应用最成熟的便是kalman filter[66][67],基于kalman filter的方法应用时的模式大致为在t时刻通过对外部事物的运动学以及动力学模型进行向前迭代,得到t+1时刻初步预测状态,而后在t+1时刻由车辆自带的传感器如GPS等获取位置等状态信息,两种状态信息进行融合后得到最终预测状态。由此过程得到外部车辆的预测轨迹,进而根据预测轨迹之间碰撞的可能性来进行风险预估是进行风险预估的一种常用方法[1]。同样拥有此模型迭代-状态信息采集-状态信息融合更新过程的方式还有基于蒙特卡洛方法的粒子滤波[5-7],与基于kalman fliter的方法不同的是,此方法不仅可以根据t时刻的状态来预测未来状态,还可以根据t时刻之前的某一距离窗或时间窗内的状态来预测未来,如Christoph Hermes等人在[7]中利用t时刻30m的距离窗内的状态进行轨迹预测,预测时域可达到3s。然而其距离窗长的特点也意味着要花费更多的时间进行状态采集,这直接限制了这一方式的实车应用,针对这一问题,Stefan Hoermann在[5]中通过使用雷达其他车辆的加速度,借此判断其driving style,并且在此基础上直接利用粒子滤波进行向前传播,不仅解决了距离窗的问题,还获得了2~5s的预测时域。以上的所有方法虽然具有解释性强、算法相对轻便的优点,但是其最高的预测时域低的缺点使得其不能够单独出现在轨迹规划或风险评估模块中,现如今通常是将其与其他预测时域更长的算法结合进行使用,如BP-Network、LSTM-Network等等将在下文记叙。## 2.1.2 Maneuver based approaches图4:HMM(上)与DBN(下)结构区别[9][17]这类方法中主要包括基于Hidden Markov Model(HMM)的方法,以及基于Dynamic Bayesian Network(DBN)的方法,上述两种方法在使用形式与内在本质上有着极大的相似性。关于HMM模型本身的详细介绍可参考文献[8],本节重点介绍其在DMAP上的应用。相比于Physics-based approaches,基于HMM的方法特点在于不需要动力学或者运动学建模,预测时域更长并且更加稳定。HMM与Markov Model相比,除了一条显性状态序列以外,还有一条隐形状态序列,在其应用到DMAP上后,显性状态序列一般指的是可通过车辆传感器观测到的外部车辆的状态,例如速度、加速度等等,隐形状态序列一般指的是HMM输出的被检测物体的驾驶意图。例如Thomas Streubel 等人在[9]利用外部车辆的速度、加速度以及前轮转角预测其打算拐弯还是直行,预测时域可达到7s,而显性状态与隐形状态之间的表现概率(emitting probability),以及隐形状态与隐形状态之间的传递概率(transition probability)的获取主要通过learning-based的方法,因此 HMM的预测准确性与所使用的数据集有很大依赖性[9]。Xiaoxia Xiong等人在[10]中利用HMM与SVM结合构建碰撞预警系统,他将检测到的外部车辆的运动状态当作显性状态,将车辆安全性当作隐形状态,配合SVM给出的换道决策,根据周围场景进行风险预估,但是他在构建HMM时仅将外部车辆的状态纳入了决策,除了车辆以外,诸如行人或宠物等也应该纳入监测范围。同样是针对HMM的构建问题,为了提高车辆之间的“交互性”,除了[10]中考虑的问题以外,Wei Liu等人在[31]中将外部车辆的“reaction”纳入建模,该reaction指的是外部车辆的四种状态:stopping、hesitating、normal and aggressive,具体通过外部车辆的速度的变化情况来判断,HMM构建完成后通过DESPOT算法进行求解,达到了在线运行的目的。随着所考虑事物的多样化,模型便会愈加复杂,求解便愈发困难,HMM问题本身的复杂性就已经很高,在其问题求解上无法得到解析解,只能通过数值方法进行最优解逼近,而这种方法就很容易导致局部最优问题,为此Shai Shalev-Shwartz等人在[11]中利用无参数的强化学习的方法进行求解并且达到了比较好的效果,其泛化能力还有待提高。单独一层HMM只是进行做外部车辆的行为预测,例如上文提到的外部车辆的转弯直行,或者是一段加速度序列[12],以上HMM输出结果便可以作为输入控制下层控制器进行轨迹规划或者轨迹追踪[13]。Ning Ye 等人在[14]中首先利用外部车辆的一段历史轨迹信息更新HMM的参数,然后利用Viterbi算法结合这段历史轨迹信息以及HMM模型,解码得到HMM的两组隐状态,其中一组隐状态便是所预测的轨迹。为了提高HMM预测的准确性,Fang Li等人[15]对HMM模型进行了一点修改,提出了Auto-regression (AR) based HMM,目的是将所预测车辆过去的驾驶信息纳入考虑,其Observable states之间也出现关系,其余不变,其结构如图5所示,随后通过普通换道场景与紧急换道场景的仿真证明了AR-based HMM的预测准确性要高于一般的HMM。在对HMM的结构进行变化的方向上,[15]从考虑历史信息的出发点进行修改,除此之外,同样是为了提高预测准确性,以及更好的增加各辆车之间的interaction能力,还可以从将各辆车之间可能出现的互动,即某辆车对其他辆车的反应纳入考虑,而拥有上述这一属性的方法则是基于DBN的方法,DBN通过允许状态空间以被分解的形式表达而推广了HMM,从表现形式上来看,可以理解为用DBN模型进行预测时,状态空间中可出现多辆车[16],也可以将本车驾驶员的状态纳入考虑[17],其结构形式与HMM的异同点如图5所示。但是本质上其实不论是AR-based HMM或者是DBN都与HMM是类似的,在使用形式上乃至注意事项上也是类似的,DBN由于能够更好的表达环境事物之间的interaction,其准确性一般也要高一点,但是这也提高了求解难度图5 HMM与DBN以及改良版HMM在结构上的变化在基于概率的方法中,基于HMM、DBN的方法对于intention prediction更加稳定准确,但是其模型的复杂度高,在线求解更困难,并且应用在DMAP中时也需要与下层控制器或者路径规划模块结合,Physics based approaches虽然可以直接预测出轨迹,但是出于对安全性的要求,该方法通常作为下层路径规划模块与其他intention prediction算法结合使用,例如下文会提到的LSTM以及BP网络等等。
日后需要考虑的问题除了一直都存在的算法的效率与建模的完备性以外,还有对驾驶安全的考虑,具体如下:(1) 本文提到的Maneuver based approaches与Learning based approaches均需要从驾驶数据集中学习转移概率值或参数,因此如何使得算法对于不同的场景可以保持较高的泛化能力尤为重要(2) 多智能体之间的特性需要被反映在算法中,例如:合流路口相遇的车辆在决定谁先进道时,两辆车可能会同时刹车又同时加速,即表现出互相影响的交互特性。(3) 若用V2X技术,丢包问题与传输延迟问题对预测结果影响巨大,若联合V2X通信与传统的预测方法,则如何数据融合才能获得最高的结果置信度。(4) 亘古存在的效率问题,目前直接从算法本身做效率优化需要较大创新力,更常见的是针对某一问题用不同复杂度的预测、规划方法结合解决