先给地平线的小姐姐道歉,拿到东西好久了,一直拖拖拉拉的的,今天终于写了。
前几篇看这里:
地平线机器人平台发布浅谈(可能是深谈)
地平线初体验.上

看看这承诺,应该要多写几篇
板子已经拍过很次了,但是还是想拍一下
开始了

我土狗了,一开始是使用的USB网络,话说我上次插线插错了,TX,RX,GND才对。。。
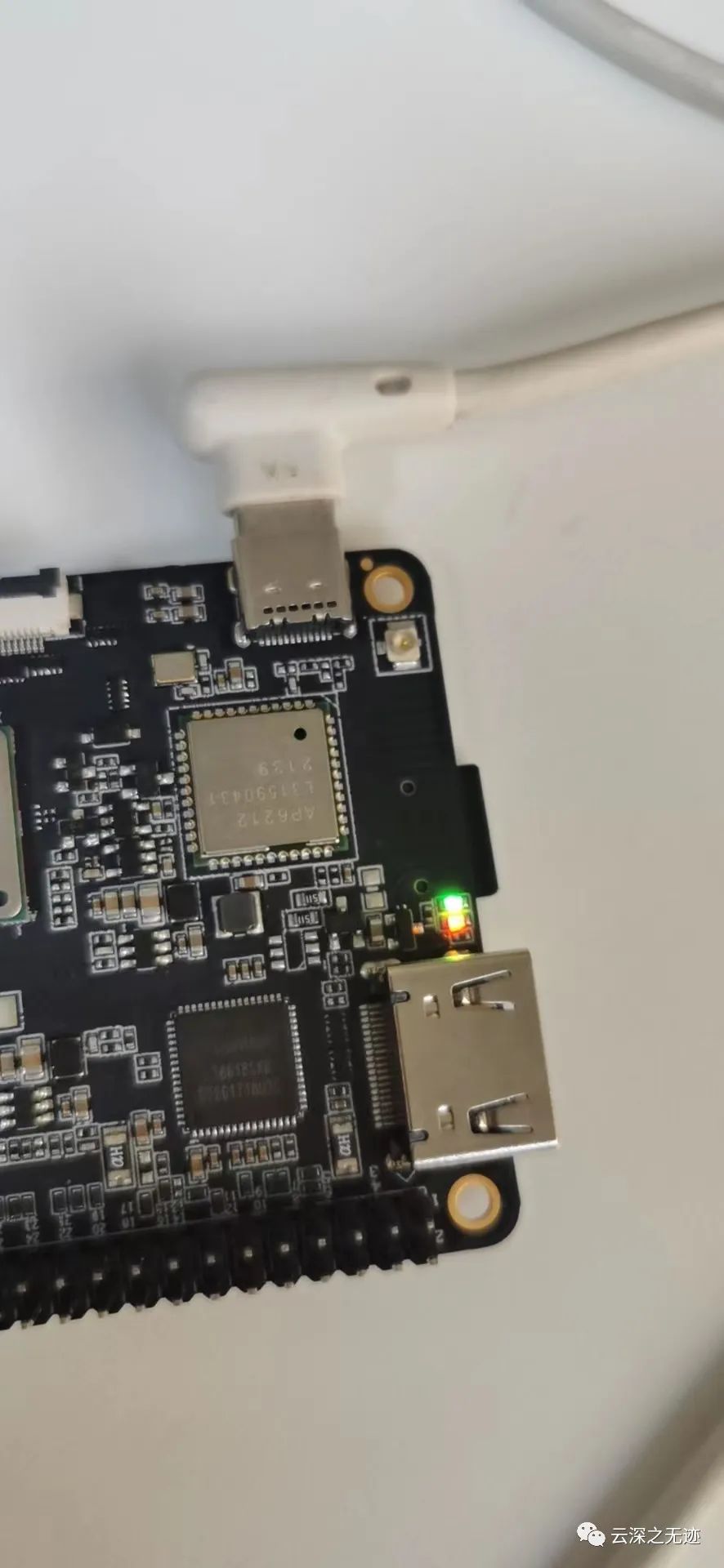
这个是简单的跑了自带的demo,板子正常

CP2101是串口的板子
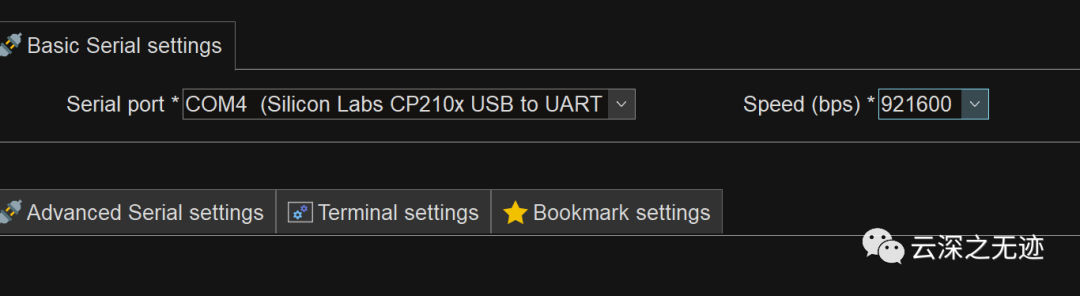
设置的波特率
sunrise是没有什么显示的,盲输入
一开始是有一个固态的IP
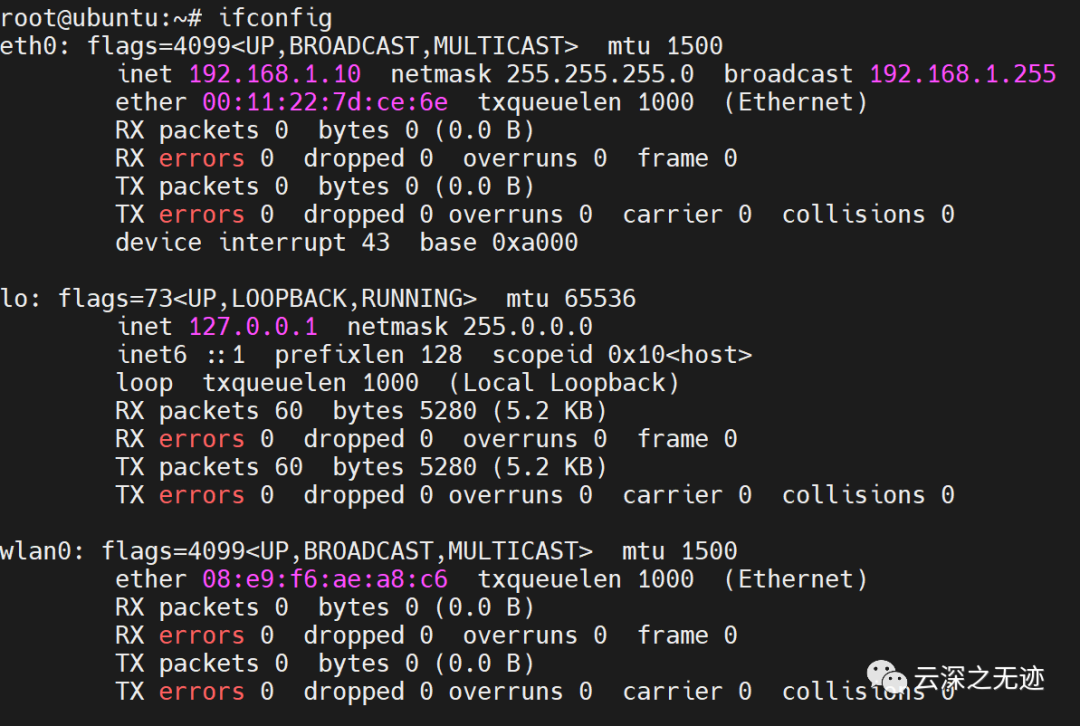
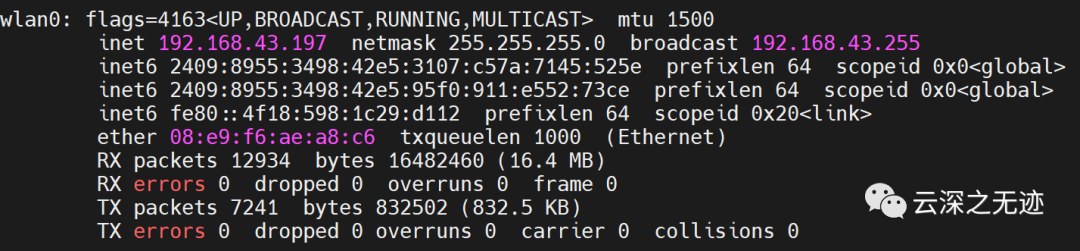
看这个IP

这个是自带对网卡的信息打印
sudo iwlist wlan 0 scan
这个是具体的执行的代码的样子
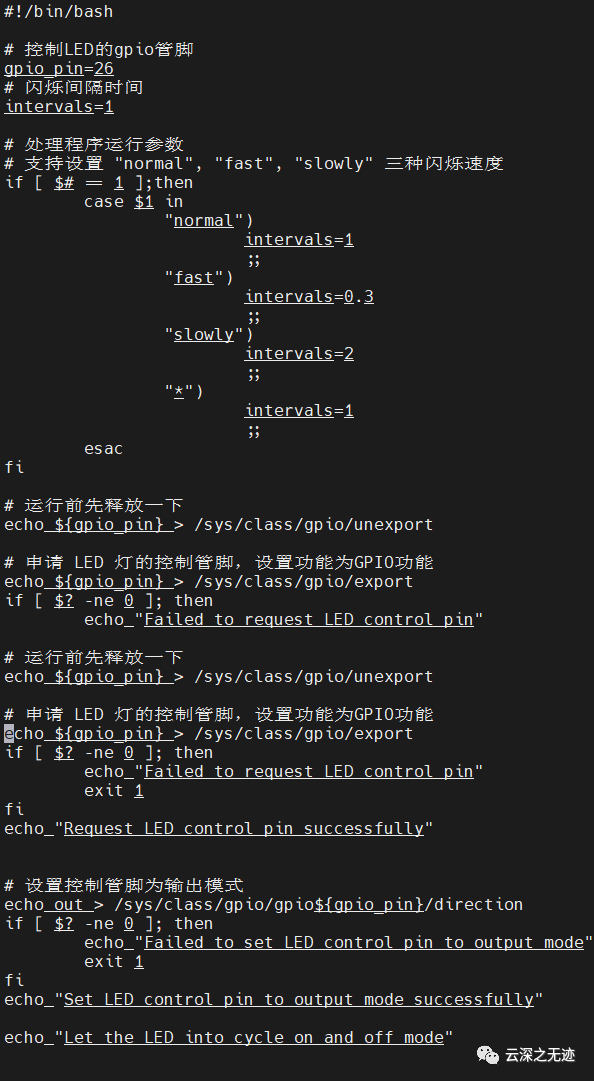
是用SHELL写的
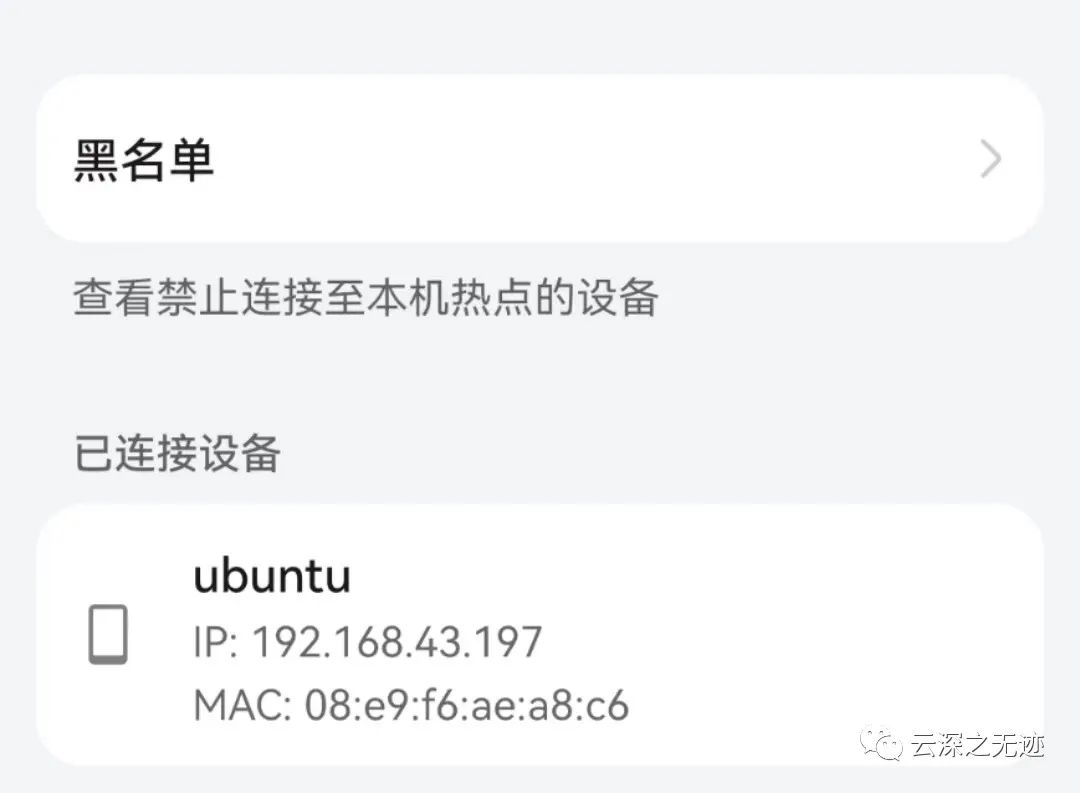
最后使用WIFI链接
稍等一下就连上了
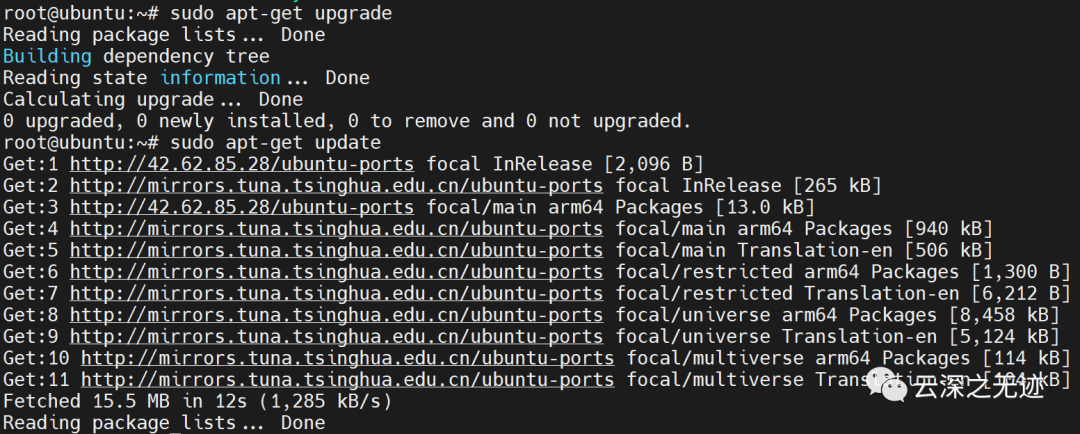
更新一下系统
后面是SSH的IP
VNC死活连不上,不知道为啥
FileZilla是一个文件交换的软件
有改动的文件会有提示
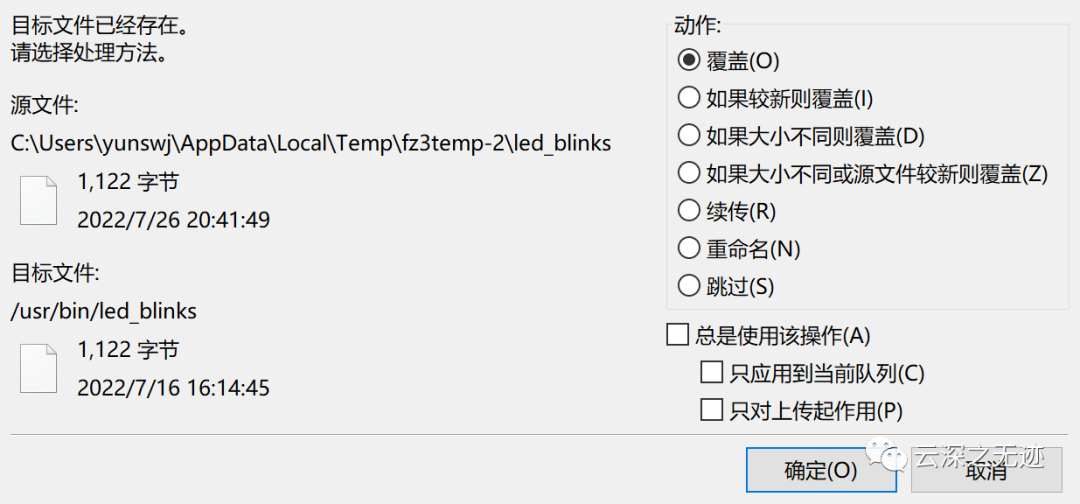
会有一个提示
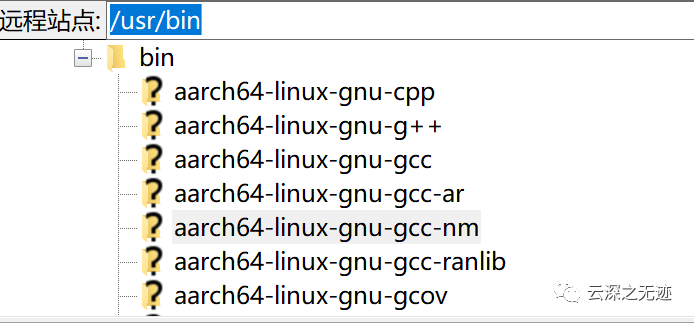
我们可以在这里输入地址来导航要的位置
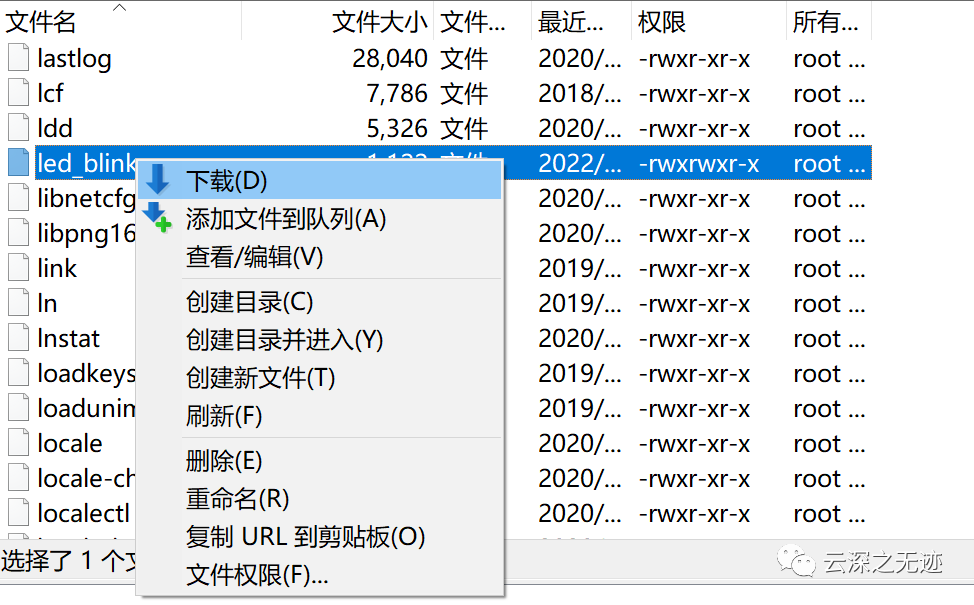
右键可以直接打开
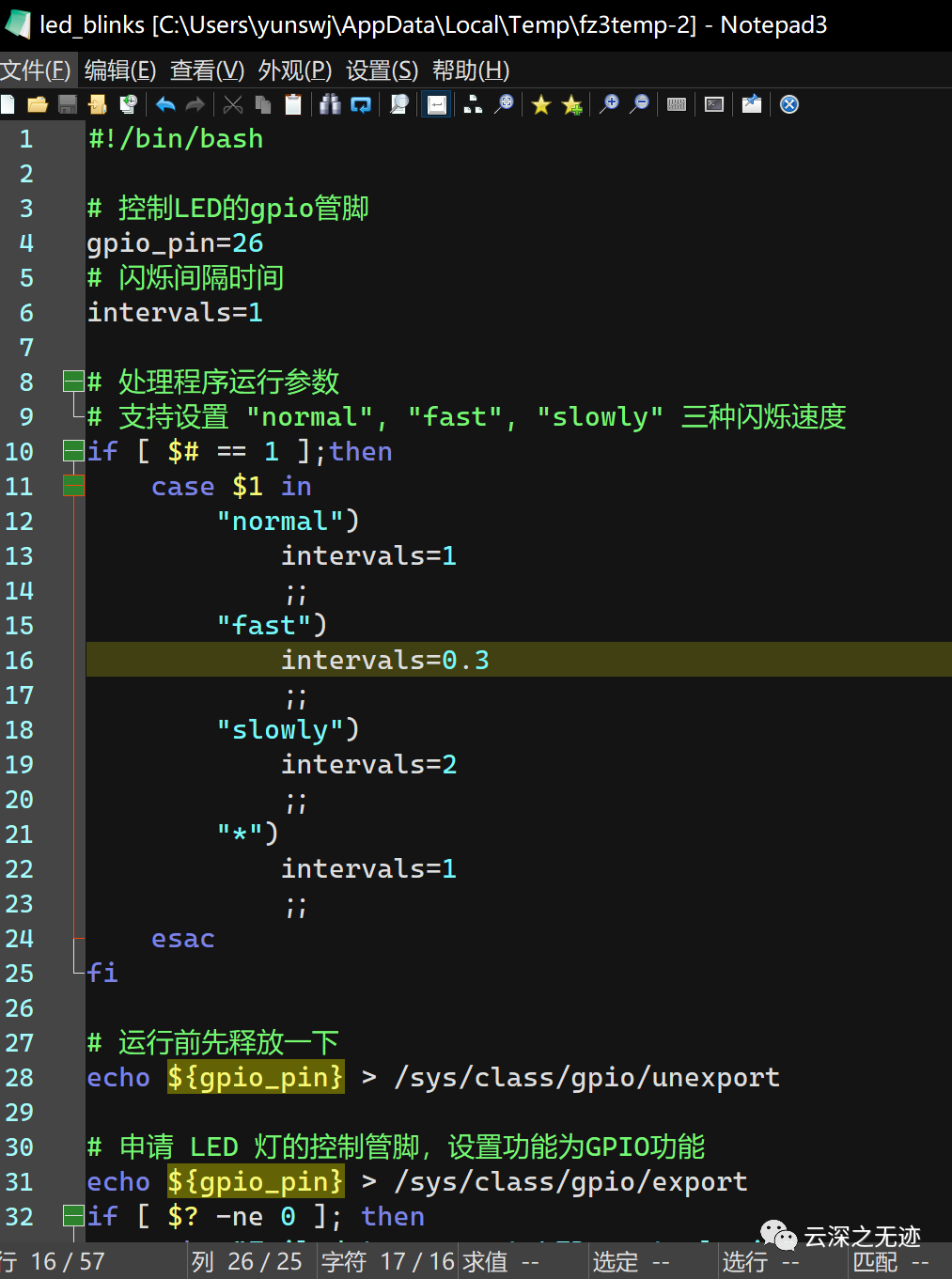
NotePad3的编辑器
sudo apt-get install nanonano的文件编辑器也没有,安装
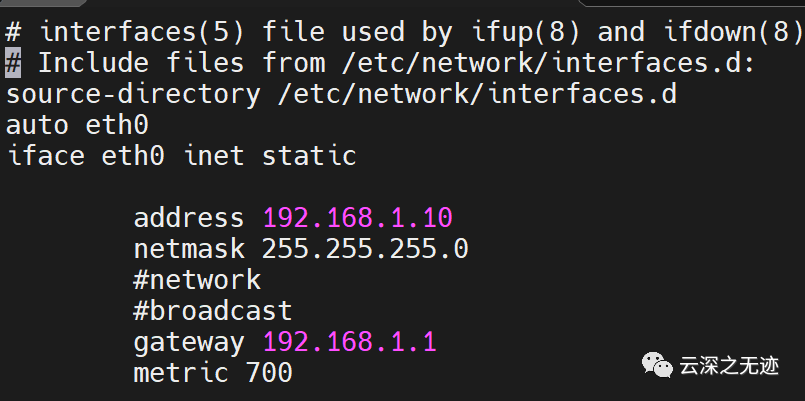
这个是静态的IP地址,在这里设置
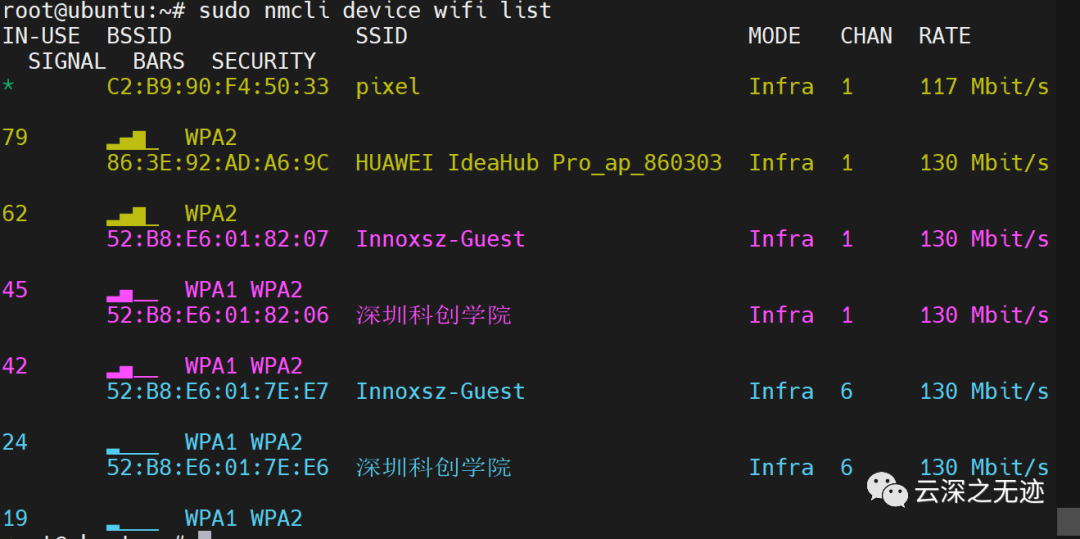
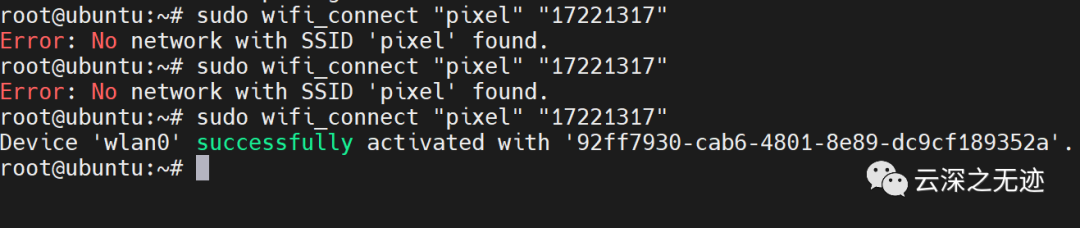
nmcil可以打印WIFI的扫描信息
sudo wifi_connect "SSID" "PASSWD"使用这个来链接WIFI
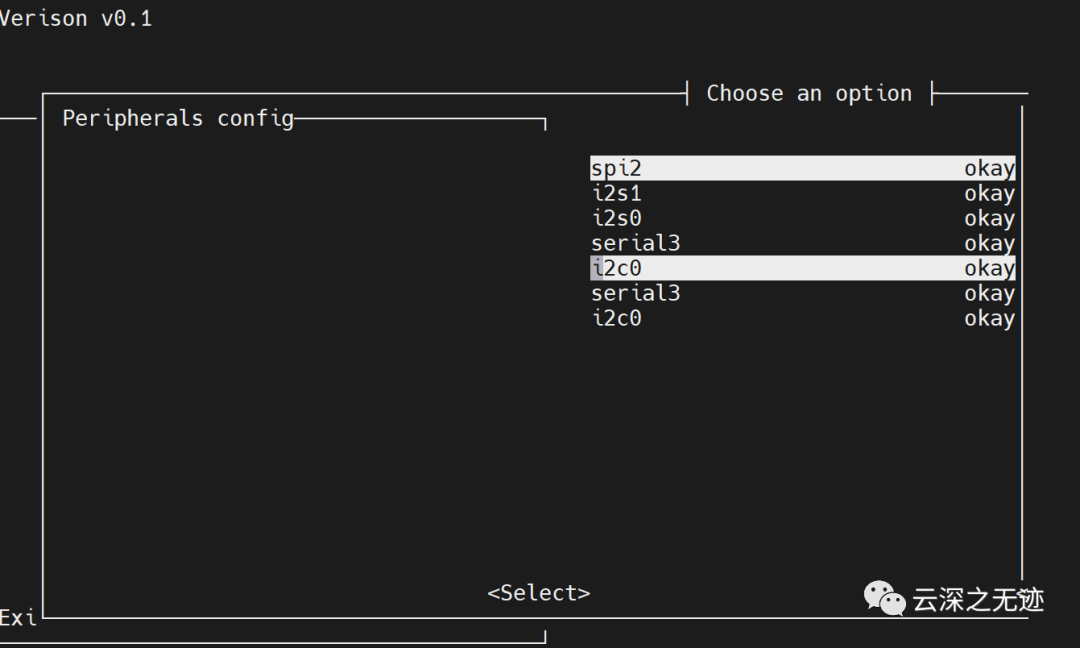
这个是内置的功能打开
这个是使用Python编辑器控制硬件
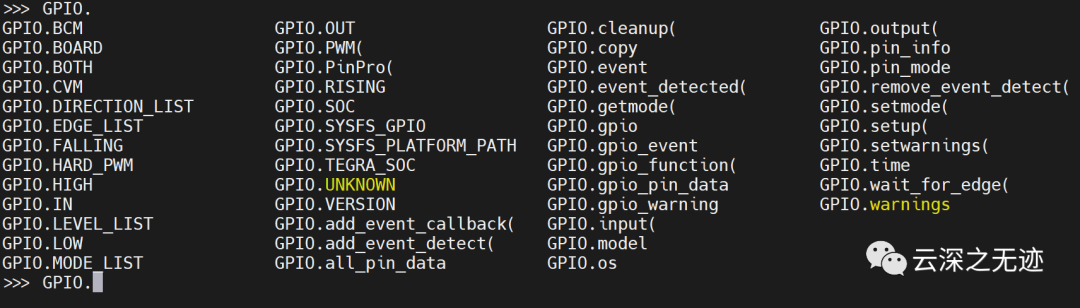
这个是补全的一些待补全的函数
旭日X3派的引脚编号有3种模式:
BOARD(the pin number of the 40 pin GPIO header):物理引脚序号,在硬件上丝印上可以直接看到的序号,物理上正好一一对应。
2.BCM(the Broadcom SoC GPIO numbers):BCM是根据博通SoC的GPIO规则命名的。
3.CVM 使用字符串代替数字,对应于CVM / CVB连接器的信号名称。
SOC 对应的编号是旭日X3M芯片的GPIO管脚序号,与芯片数据手册一一对应。
/app/40pin_samples/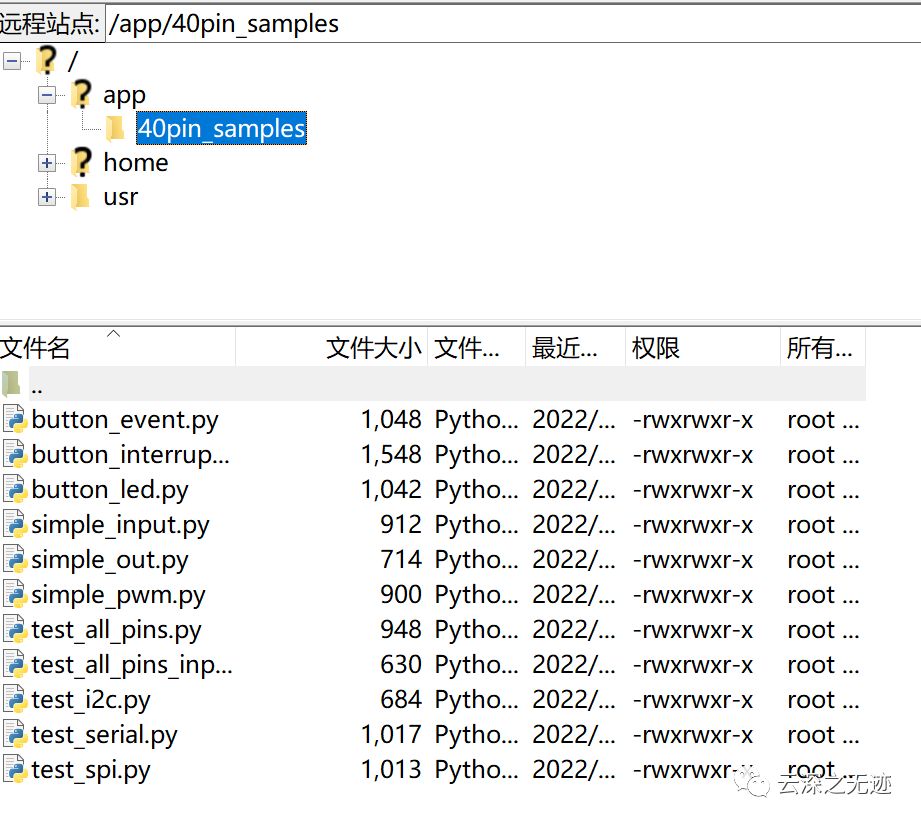
在这个目录下就是测试使用的代码

地平线给的demo很全,直接也说明这个东西了
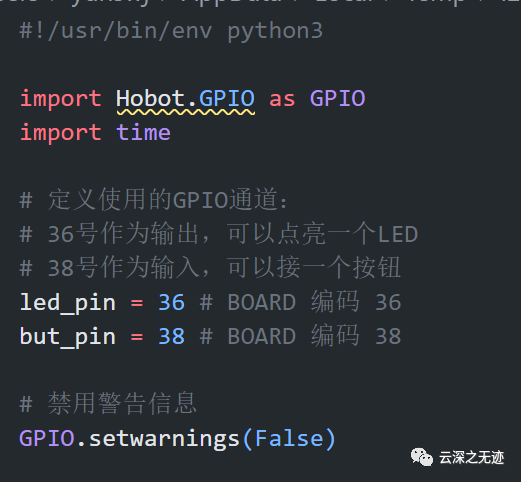
这里看一个,先导入库,设置要控制的引脚
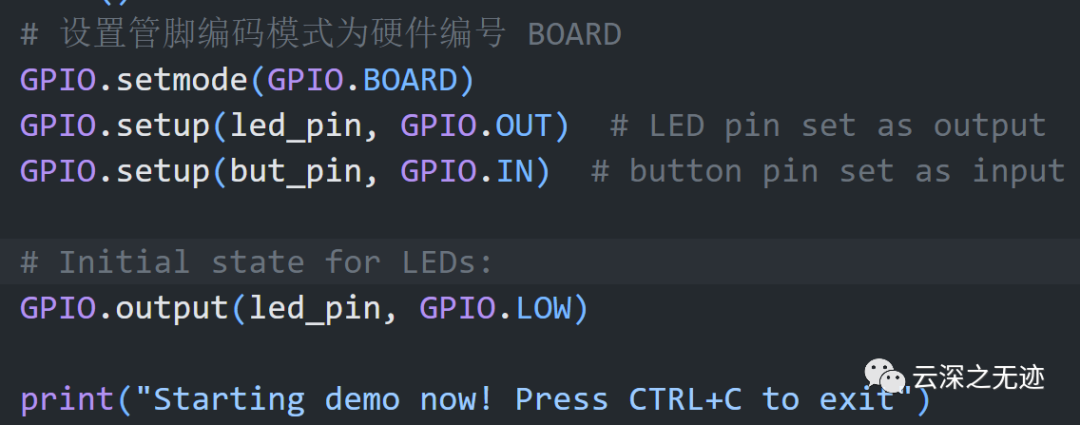
设置编码的模式,下面的就是见名知其意,上面的这些语句就是把引脚的初始化处理好了。
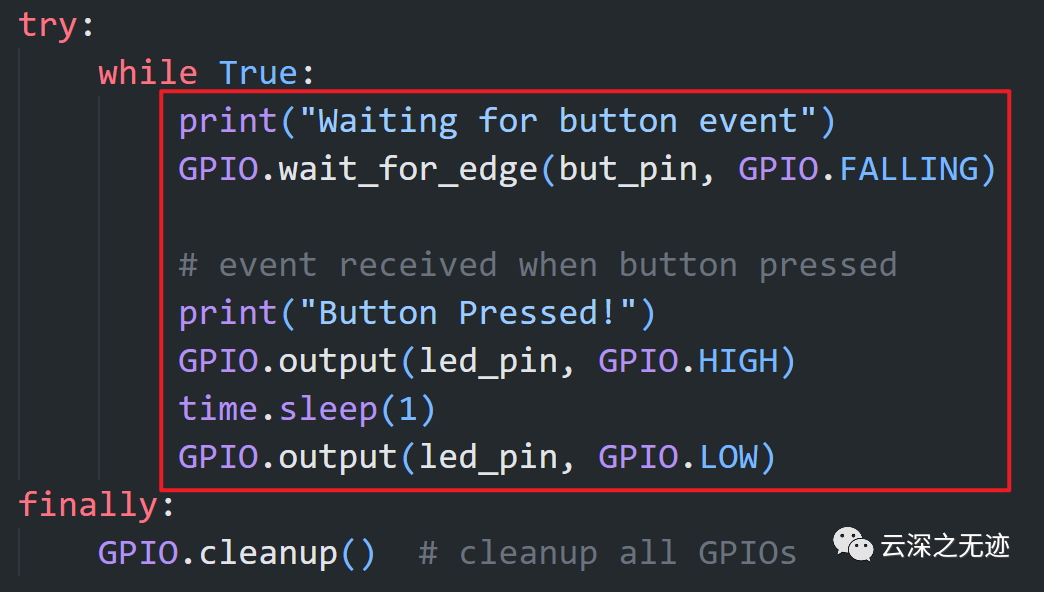
接下来就是一种防御性代码的设计,这里就设置了边沿的捕获模式,当被触发后会让指定的GPIO来做一些动作,如果都没有激发就清除所有的GPIO设置。
因为这个库是指定给的,这里就给出位置:
python2.7:
1.自带库:/usr/lib/python2.7/dist-packages/
2.pip或setup.py安装:/home/pi/.local/lib/python2.7/site-packages/
python3:
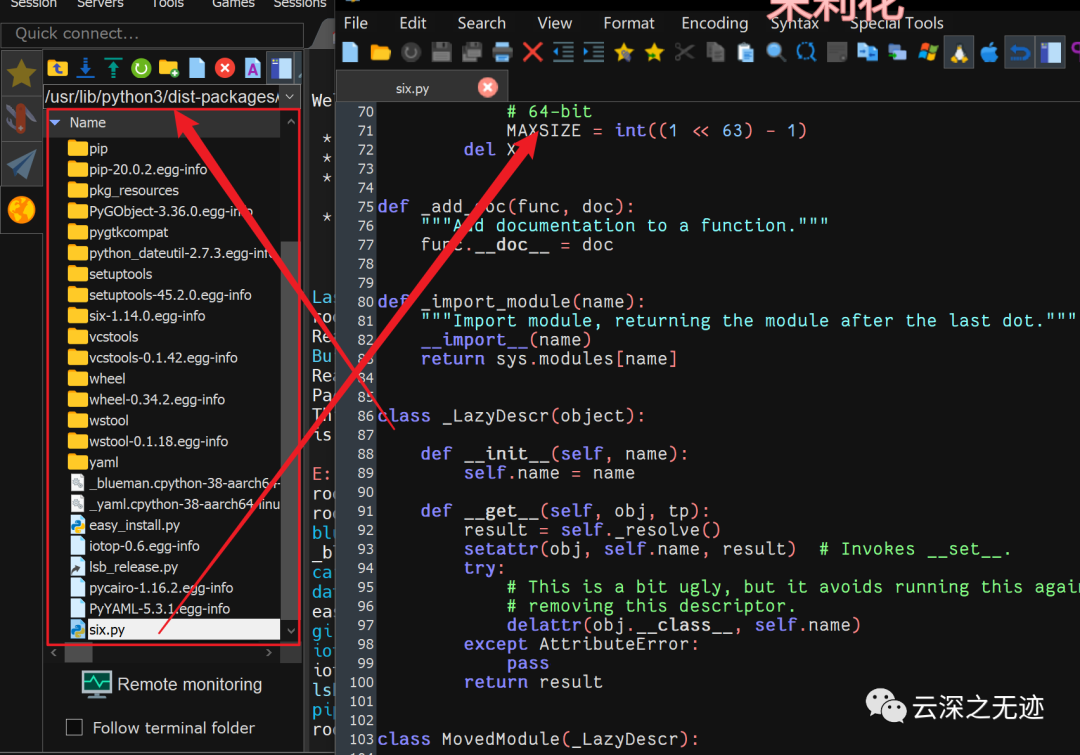
1.自带库:/usr/lib/python3/dist-packages/
2.pip或setup.py安装:/home/pi/.local/lib/python3.7/site-packages
/usr/lib/python3/dist-packages/这个库我虽然进去了,但是我也没有找到在哪里

这个我看一下,看不到我感兴趣的东西
双击文件,可以在这个自带的编辑器打开,有点爽
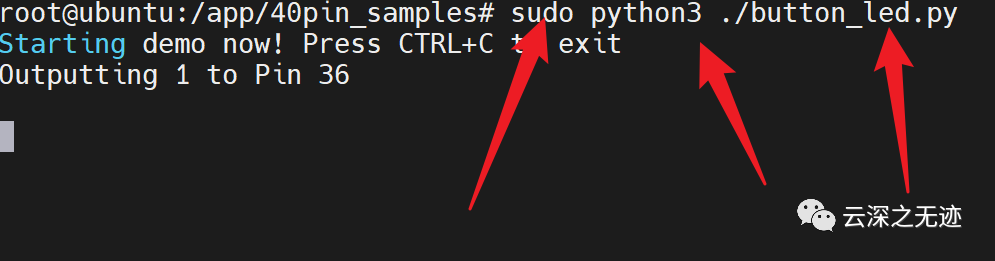
执行的时候,操作硬件需要给一个权限,之后是解释器+执行文件
自带的APP在这里,GPIO+AI+应用
deb的文件是一些库吧
这里先打开第一个文件看看
里面有一个斑马的图片

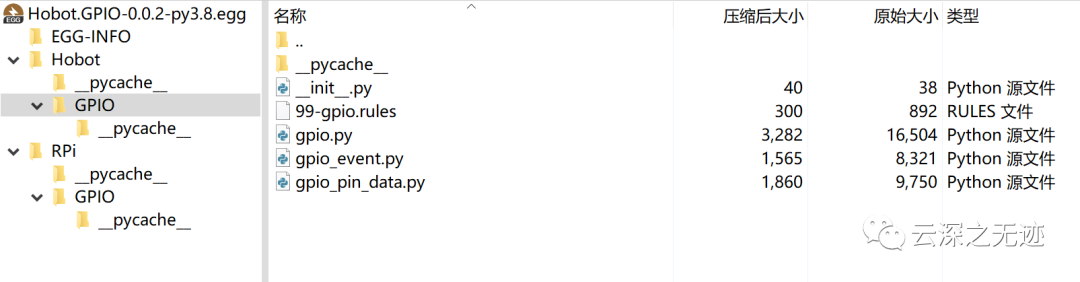
使用这个土办法看看Hobot的位置
/usr/local/lib/python3.8/dist-packages/Hobot.GPIO-0.0.2-py3.8.egg/Hobot/__init__.py位置在这里,不过都是二进制的文件
里面就似是这样的内容,SO的话可以二进制的反编译
/usr/local/lib/python3.8/dist-packages/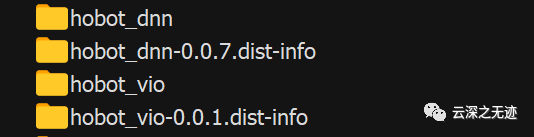
上面的位置,是有地平线的DNN和VIO的库
我翻到了一个压缩包,是可以安装的
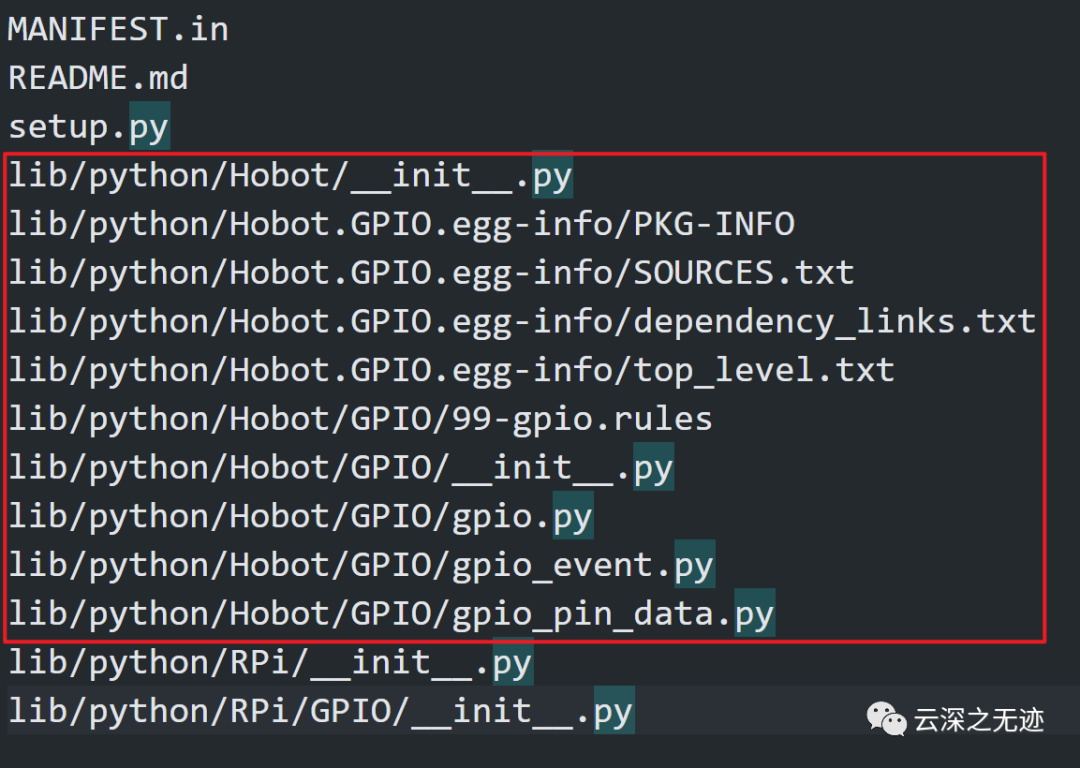
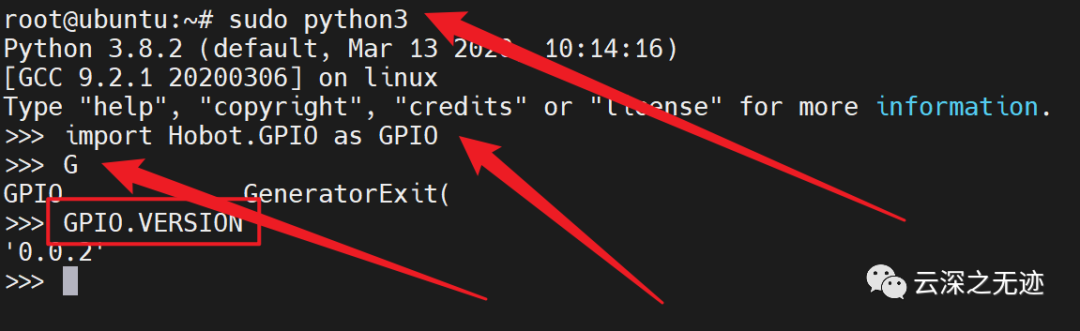
这个是GPIO的安装目录
这个GPIO的版本是2
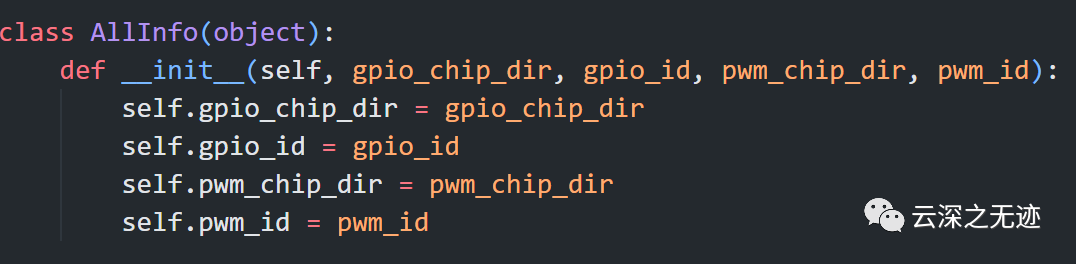
在这里被定义
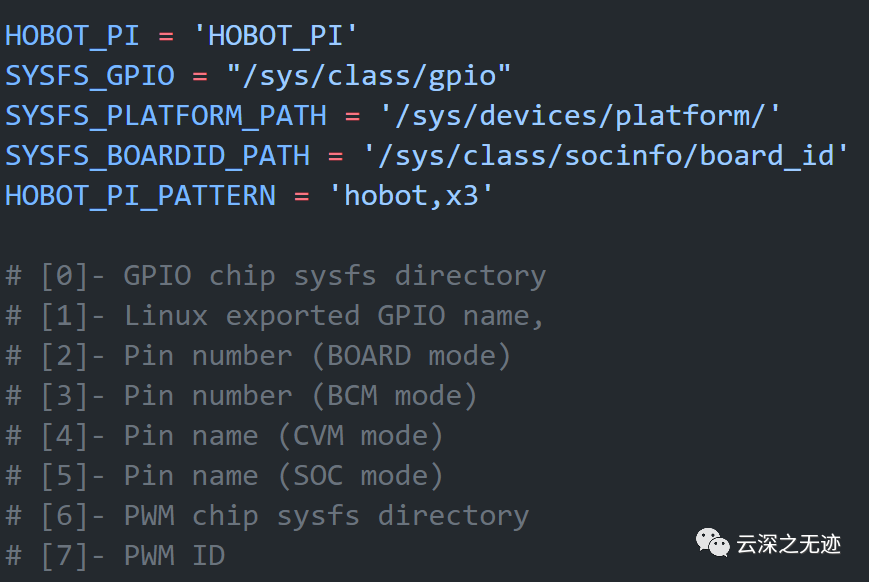
这个是定义的GPIO平台

在地平线的板子里面有三种型号,应该是使用的一个GPIO的包
还有很多有趣的东西,我继续写,准备编译SONY的相机应用和买个激光雷达来建图和记录ROS。
https://blog.csdn.net/qq_43650421/article/details/107977308https://developer.horizon.ai/api/v1/fileData/documents_pi/40pin_user_guide.html