2022年6月4日10时44分,神州十四号载人飞船再次起航,引发国际社会高度关注。
中央广播电视总台对火箭发射过程进行了全方位的跟踪报道,直播火箭发射画面中航天员们在舱内比“ok”手势反馈状态良好。发射指挥大厅内有条不紊的回响起一些熟悉的口令:“USB,雷达,跟踪正常!”“遥测信号正常”。兴奋之余你是否会生出一连串的疑问:发射过程中,速度和距离不断变化的前提下,如何精准追踪目标?遥测信号是什么?USB雷达又是什么?
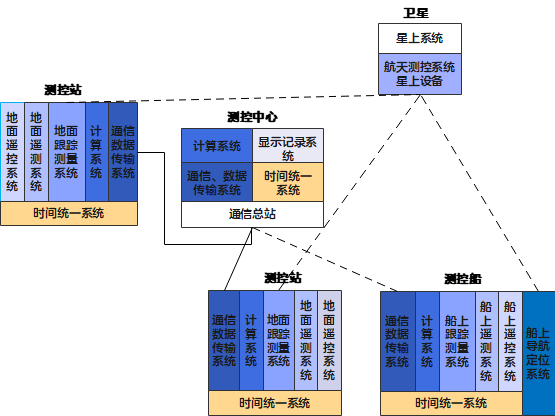
带着这些疑问,我们首先一起来了解下“航天测控系统”。跟踪测量系统:跟踪航天器,测定其弹道或轨道。能精准跟踪航天器是实现通讯的基础,当航天器进入太空轨道之后,地面的监控站需要时时刻刻地监测航天器的一举一动。- 遥测系统:远程测量、传送航天器内部的工程参数和用敏感器测得的空间物理参数。
- 遥控系统:通过无线电对航天器的姿态、轨道和其他状态进行控制。
- 计算系统:用于弹道、轨道和姿态的确定和实时控制中的计算。计算系统是整个测控系统的核心,要求大容量,速度高的计算机,经过计算、分析、演练确认其正确性,确保双工工作的可靠性,定型后才能使用。各个测控站将本站数据经过处理后,集中到测控中心来进行分析和做出控制决策。
- 在航天活动中,各测控站所获取、记录的测量数据和时间必须有严格统一的同一时间标准才能对他们进行分析和处理。10秒点火倒计时可不是为了装酷耍帅!可以让参与人员迅速get当前系统状态,做出正确反应。实际上倒计时程序还有最后2小时、1小时、30分钟,各个系统要保持同步统一,严格而科学的把火箭起飞前的各种动作按时间程序化,做到“万无一失”。
- 显示记录系统:显示航天器遥测、弹道、轨道和其他参数及其变化情况。
- 通信、数据传输系统:各种电子设备和通信网络的中间设备,沟通各个系统之间的信息,实现指挥调度。
各系统之间通过通信网络相互联接、相互协作、相辅相成构成了一个完整的航天测控系统。 我们之所以能看到清晰稳定的直播画面,前提就是测控系统可以持续稳定追踪火箭的运行轨迹
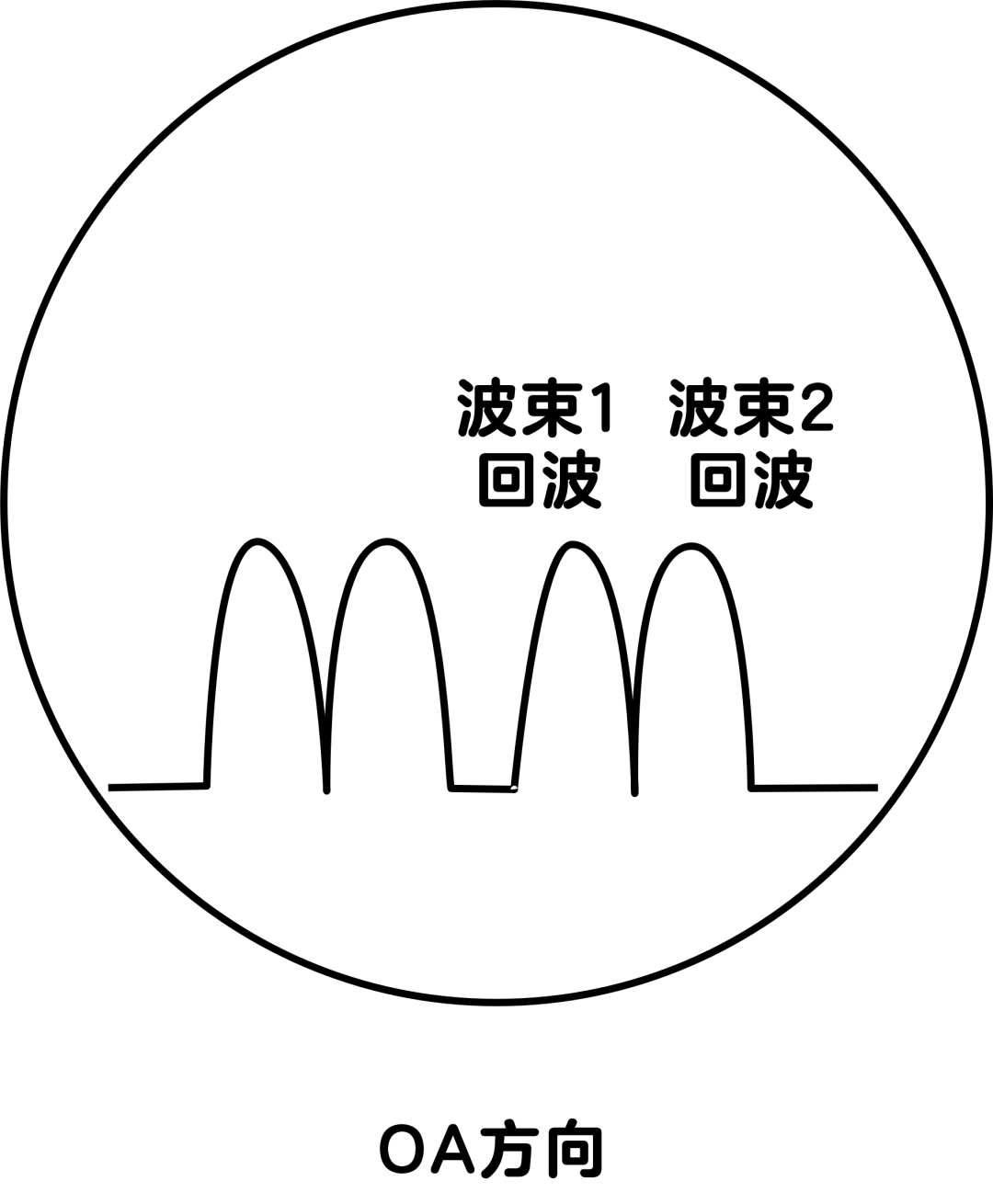
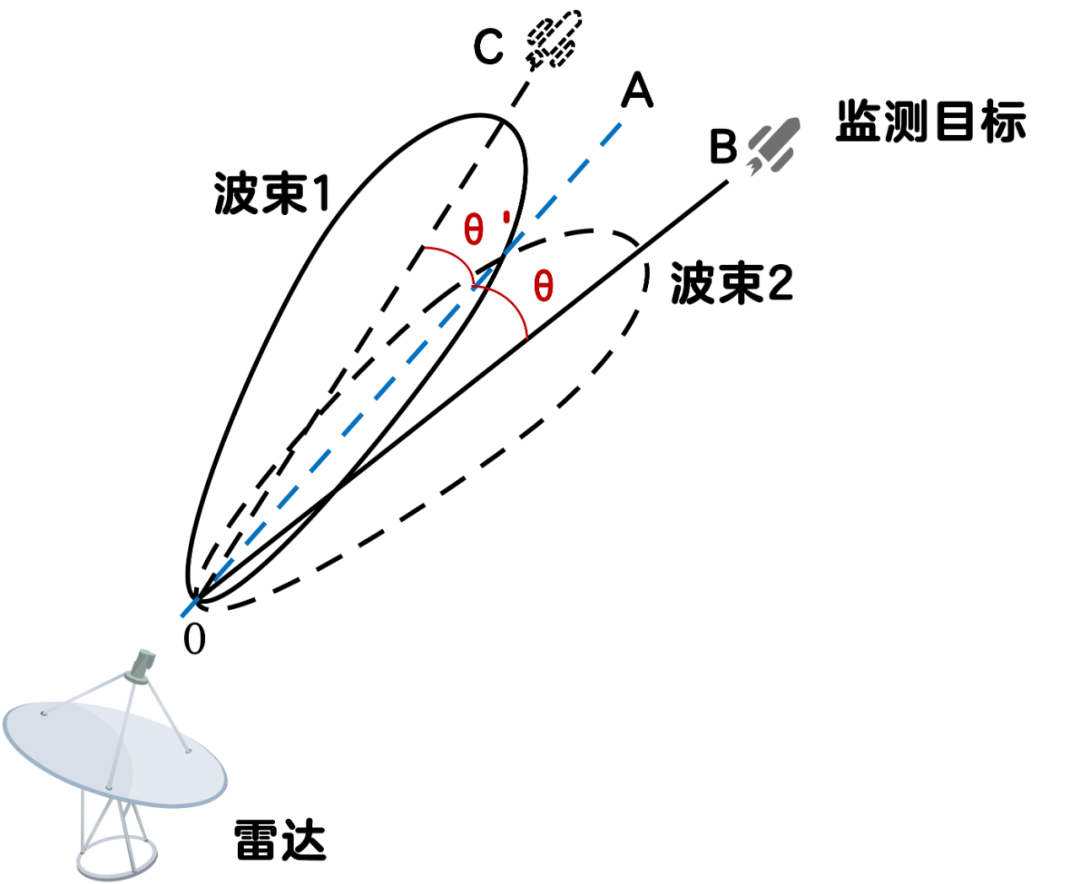
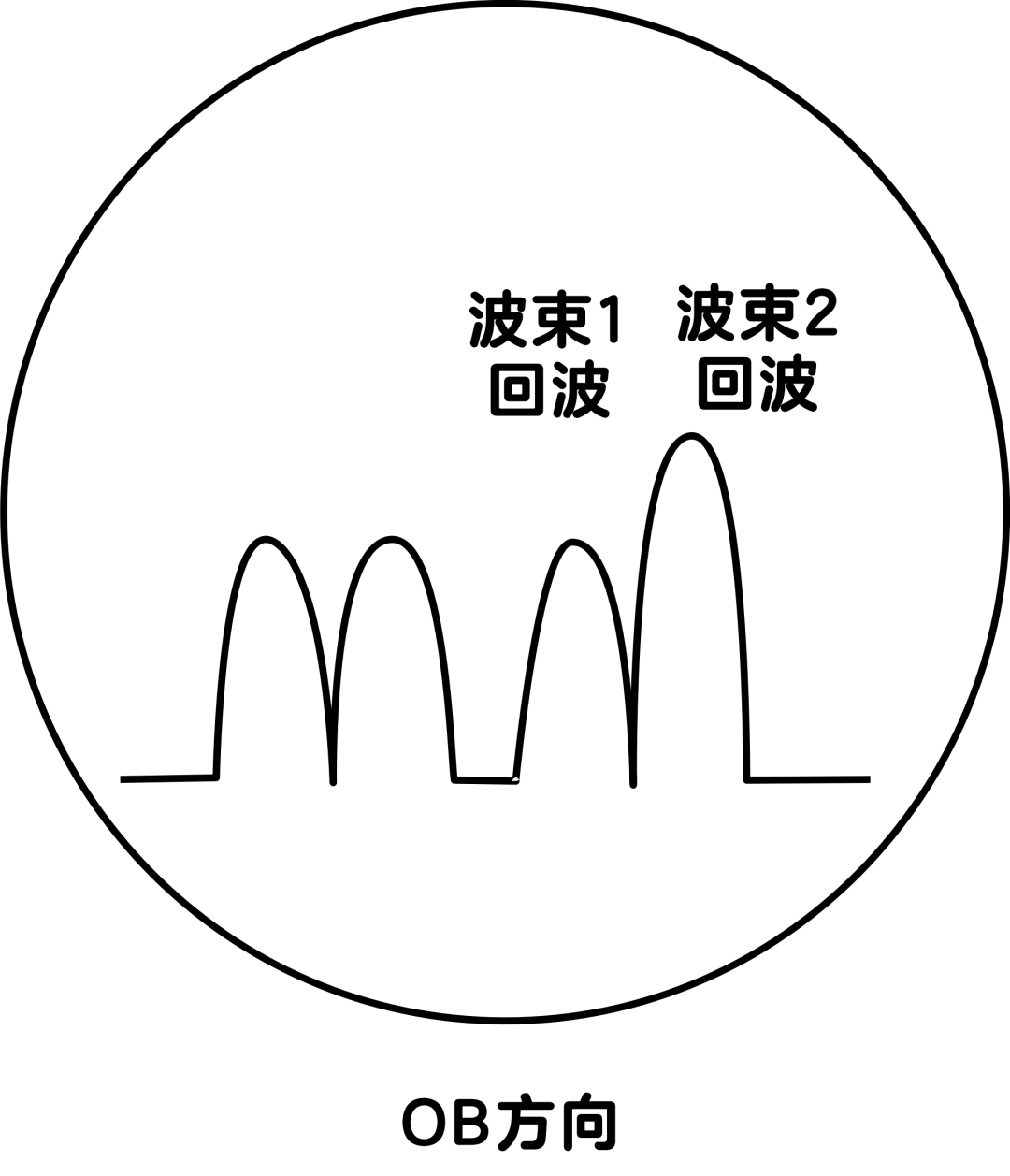
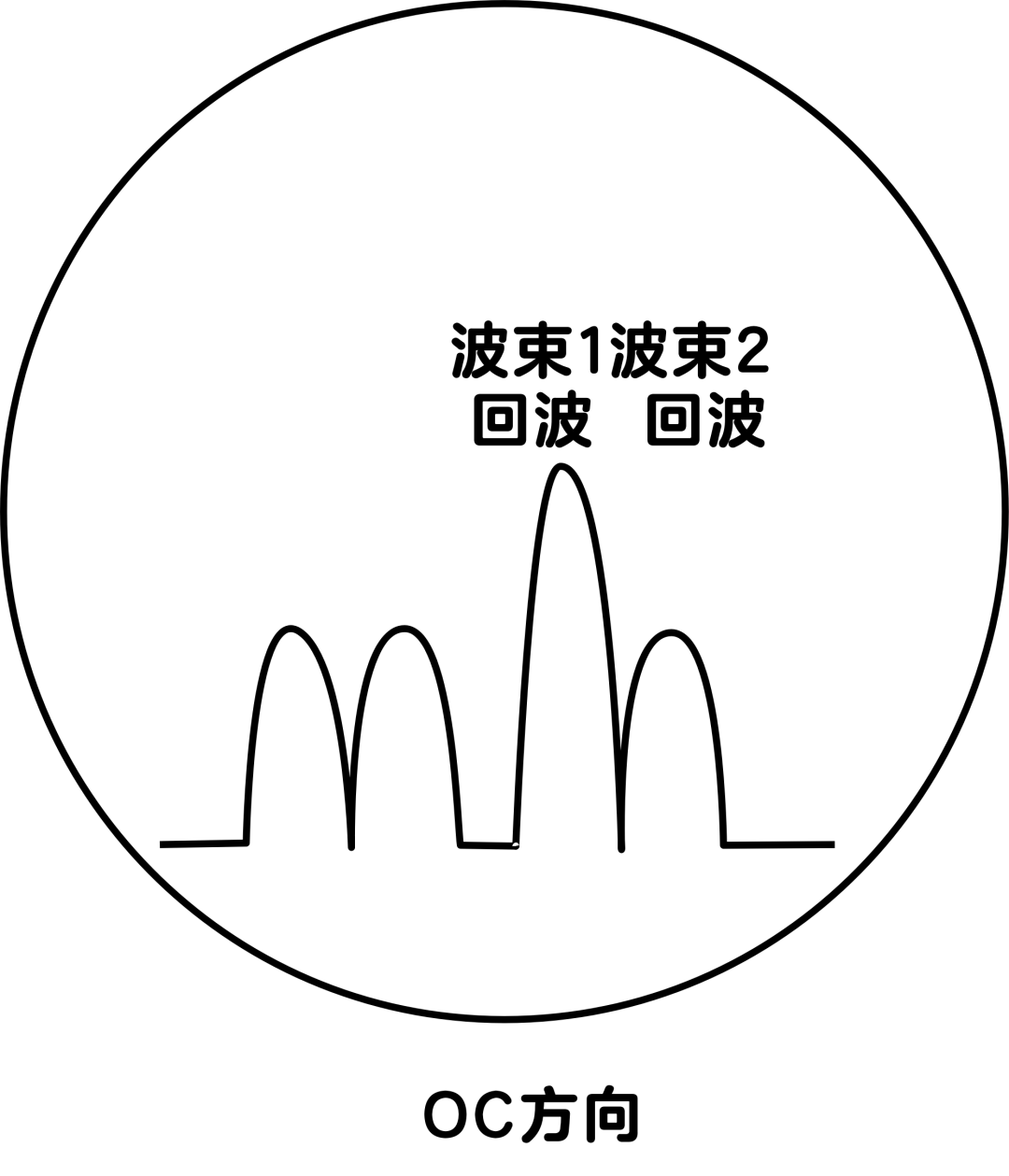
“遥测信号正常”表明火箭运行的参数在理想的范围内。遥测是一种自动通信过程,航天测控系统通过遥测方式可以将无法直接访问的测量数据传送到测控站,从而实现对被测目标的测量和监测。火箭发射升空后,火箭内部的数据只能通过遥测系统将各种数据传回地面,从而监控和分析火箭状态。如果火箭在飞行中出现问题,遥测数据几乎是唯一的线索。我们听到的“USB雷达踪正常”的意思就是测控系统在一段时间内连续锁定了目标。这里的“USB”是指“S波段统一测控系统”(Unified S Band System)的简称,该系统主要实现对航天器的跟踪、遥测和通信等功能。“雷达”可以获取目标的位置和运动参数数据,工作频率主要在S波段(频率范围:2-4 GHz)。它可提供目标的运动轨迹,一般由距离跟踪支路、方位角跟踪支路和仰角跟踪支路组成,分别完成对被测目标的距离,方位和仰角的自动跟踪。实现这个跟踪过程,需要在雷达和被测目标之间建立闭环反馈控制。例如:雷达要获得监测目标的精准数据,需要经过雷达主反射面(就是我们熟悉的大锅)聚焦以后,在空中形成两片椭圆形叶子状的信号且彼此部分重叠,真正对目标有用的,正是信号叠加的中间部分。当雷达自动跟踪一个目标时,如果监测目标处在两波束交叠轴OA方向,收到的信号强度相等。换言之当两个波束收到的回波信号相等时,等信号轴所指方向即为目标方向。某一瞬时因目标运动到一个新的位置而偏离了天线电轴指向(即OA方向),目标与天线电轴指向之间就会产生一个夹角,称为角误差。角误差使天线系统有误差信号输出(如果目标处在OB方向,角误差为θ,波束2的回波比波束1的回波强;处在OC方向时,角误差即θ′,波束2的回波较波束1的回波弱,因此比较两个波束回波的强弱就可以判断目标偏离等信号轴的方向),接收机对误差信号进行放大和变换后送到天线的方位、仰角驱动放大器的输入端,经功率放大后控制方位、仰角驱动电机,改变天线电轴指向,使天线电轴重新瞄准目标,这就是雷达对目标的角坐标自动跟踪过程。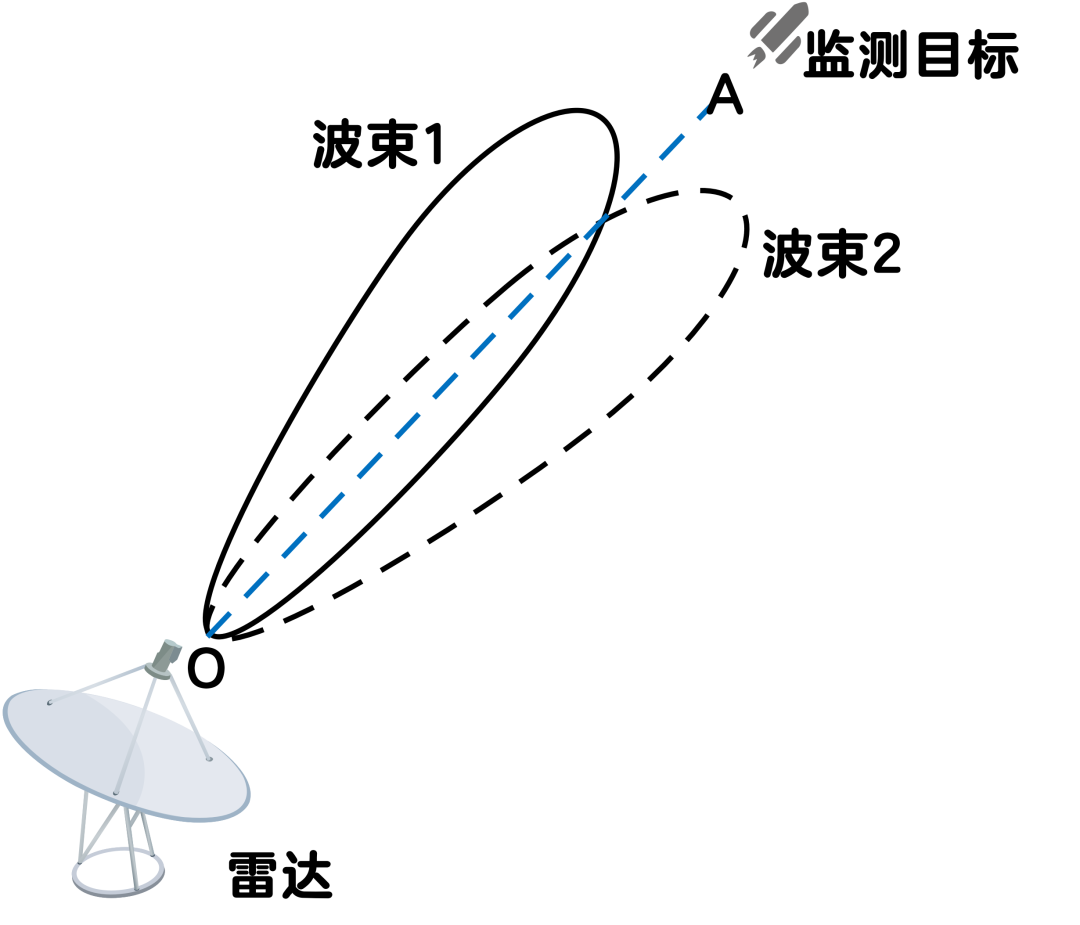
但实际上要实现稳定跟踪,被测目标需在一定范围内,生成的误差才可以生成反馈信号推动天线转动。一旦目标超过这个范围,就无法做到误差收敛,导致丢失。这就需要一台低精度的雷达”小秘“作为辅助,它的波束会更窄。被测目标在观察范围内时,能获得有效的反馈电压实现自跟踪,将目标角度信息缩小到1度以内。一旦捕获目标,就可以通过跟踪误差获得的反馈电压,推动雷达天线随着目标的运动而运动,要想找到目标,有了这个辅助装置,再想要逃出“雷达的手掌心”可就没有那么容易了。“USB雷达”在S波段统一测控系统中主要完成目标航天器的跟踪功能。我国有自己建立的USB测控体系,包括地面测控站和部署在大洋上的远望号测控船,以便实时测量火箭和飞船的飞行状态。目前我国的测控站点分别分布在酒泉、天津、青岛、厦门、渭南、智利等地。但是任何一个地面站都不可能随时与被跟踪航天器构成通信链路,根据被跟踪航天器的飞行轨道和地面站的布站位置不同,在某个飞行圈次,与一个地面站的通信时间一般在3~8分钟之间。为了提升测控系统的覆盖能力,需要在地球表面适当的位置大范围的布置相当数目的测控站。但是受地域和安全等客观条件的限制,不可能无限增加地面测控站的数量,大量使用海上测量船代价又太高。为了扩大跟踪范围,将测控站搬到同步定点卫星上,中继卫星一般位于地球同步轨道,覆盖范围广,通过遥测,对航天器的信号中继后转发回地面测控站。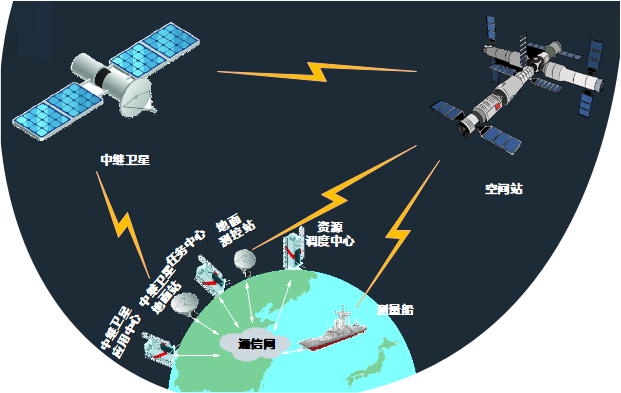
中继卫星数据传输容量大、传输速度高,将天地传输从“羊肠小道”变成“高速公路”。测得准,才能控得准,才能维持地面站和航天器之间可靠的通信链路,因此中继卫星重要性不言而喻。我国网络通信研究院自主研制的天链一号地面终端站,新建的多套固定站、车载站、便携站和升级改造后采用高阶调制、高效编码等技术的卫星通信设备的硬件及软件,共同组成的航天测控系统,足够的卫星通信传输能力,可以满足载人空间站长期在轨运行数据传输的要求。想和航天员们电话视频聊个天?还想听个“太空网课”?那都不叫事,你就说说咱的测控系统的业务能力是不是杠杠的。现如今能去太空上班是最令人羡慕的“出差”,然而让人羡慕的背后却有太多的艰辛,每一次发射任务成功的背后,都是无数航天科研人员日复一日地坚持。那些听起来很平常的稳定跟踪正常的口令,实现是十分不易的,每一次的发射任务不到最后一刻谁也无法真正的放心,每一个任务关键点的成功与否,都可以决定着航天器未来的“前途”是否一片光明。我国航天事业的蓬勃发展意义重大,它彰显着中国科技更进一步的飞越,是人类科技发展的未来。未来航天事业的发展,是星辰大海的浪漫征途,更是荆棘丛生的漫漫飞天路。但只要一代代平凡而又伟大的“航天筑梦人”不放弃,就一定可以完成我们“中华民族的飞天梦”。