


目前,美国在地球静止轨道(GEO)上拥有数百颗商用及军用卫星。若卫星出现故障,现有技术无法对其进行故障检测与诊断,更无法进行升级和维修。
美国国防高级研究计划局(DARPA)于21世纪初开始研究太空服务概念,希望能够寻找到提供给在轨卫星的增值服务和为现有GEO卫星群增值的硬件、软件及操作方法。2016年DARPA启动“地球同步轨道卫星机器人服务”(Robotic Servicing of Geosynchronous Satellites,RSGS)项目,旨在建立地球同步轨道(GSO)上的灵巧自主操作能力,既能延长美国现有空间基础设施的寿命,又能提升其系统弹性。
RSGS项目将DARPA开发的模块化工具包(包括硬件和软件)与私人开发的航天器相结合,创建商业运营的机器人服务车(Robotic Servicing Vehicle,RSV),达到太空中卫星在轨服务的目的。

| 服务类型 | 服务能力 |
| 检查 | 检查功能异常的GEO航天器 |
| 维修 | 维修太阳能电池阵列与天线故障等机械问题、修复有故障的推进系统 |
| 转移 | 协助将卫星转移到不同的轨道 |
| 升级 | 升级具有新功能的卫星 |
| 阶段 | 内容明细 |
| 第1阶段:研发 | 商业公司负责研发能够携带有效载荷并执行服务任务的RSV,美国政府负责研发机器人有效载荷,同时还将提升任务模拟能力和机器人硬件回路多自由度任务仿真能力。 |
| 第2阶段:集成 | 商业公司将在DARPA的支持下将有效载荷集成至RSV上。 |
| 第3阶段:发射 | DARPA将集成好的RSV发射至GEO。 |
| 第4阶段:演示 | 在DARPA的支持下,商业公司进行一系列指定的在轨演示并执行安全任务。 |
| 第5阶段:服务 | DARPA把RSV的所有权转让给商业公司,商业公司将继续拥有和运营RSV,同时向政府与私人的GEO卫星运营商提供有偿服务。 |
资料来源:调研整理
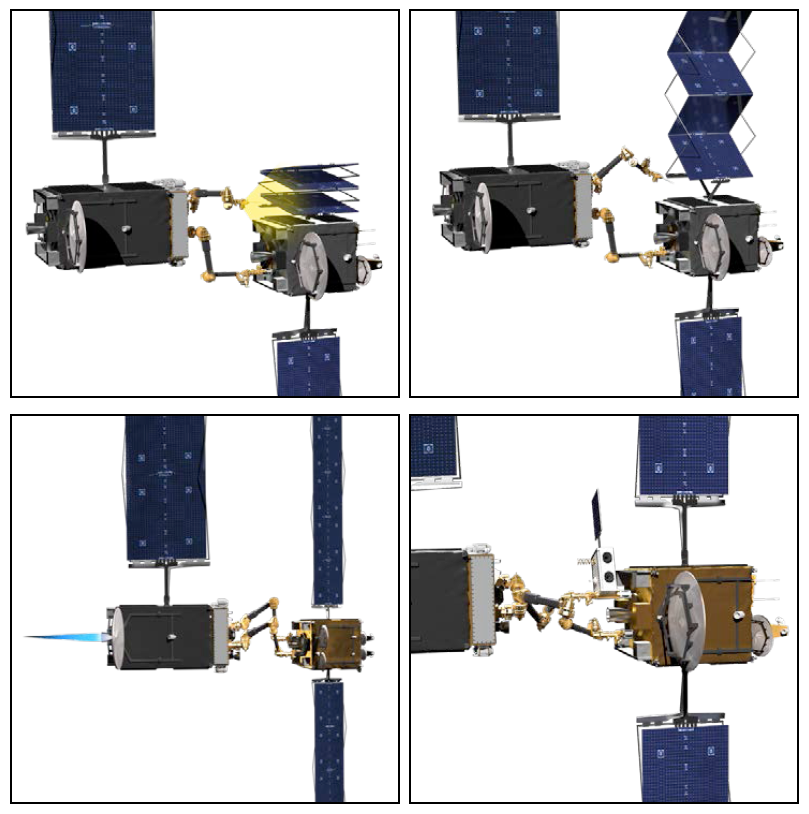
RSGS项目由RSV系统、客户卫星和地面站三部分组成。
在DARPA计划中,完整RSV系统(带有效载荷的平台)需具有导航、控制、检查、抓取、维修、升级、通信以及补给等功能。但具体设计将根据以下因素而有所不同,包括但不限于:商业案例、所需的在轨服务任务总数量、在轨服务任务频率和RSV系统的总任务寿命。总之,RSV需能在GEO的任何地方实施在轨服务。
如图下所示,RSV系统将由 RSV平台(蓝色)和 RSV有效载荷(绿色)组成。
RSV平台主要由以下几个子系统组成:
电力系统(EPS)。RSV平台为子系统提供发电、分配、故障管理与存储服务,同时也为RSV有效载荷提供运行及续航电源。RSV平台还需要在某些任务阶段提供约300Ah的存储能量运行平台及其有效载荷。平台为有效载荷提供的电力约为30~34V,该电压范围对操作RSV有效载荷的FREND机械臂的运行至关重要。
指挥、遥测与数据处理(CT&DH)。CT&DH系统能够监视平台健康状态、控制平台子系统与有效载荷续航加热装置。该子系统为RSV系统提供定时源以及为有效载荷与地面站提供指挥/遥测接口。目前,RSV平台和效载荷数据交换的关键设计包括:一个用于地面指挥与遥测的完整复式差分时钟和数据接口,一个以星上控制为目的的用于平台和有效载荷之间指挥响应的复式差分接口,以及一个用于高速任务数据的单向差分时钟和数据接口。指挥与遥测/响应回路不会超过2Mbit/s传输速率,地面实际指挥数据速率也在10kbit/s范围内。高速任务数据接口预计最小传输速率为10Mbit/s。
通信与跟踪(C&T)。RSV平台提供通信子系统,需在所有任务的关键操作中与地面站进行持续的通信。该子系统的能力包括:自主操作时上行链路速率为10kbit/s;下行链路速率为10Mbit/s;上行链路与下行链路信号加密。
推进系统。RSV平台推进系统可以使用化学推进和/或电推进。推进系统设计必须考虑到RSV系统的整体任务寿命,包括轨道转移、轨道维持、在轨激活与检查、政府演示任务、全寿命周期内的在轨服务任务以及任务末期的移除机动。同时,推进系统的设计尺寸需在交会与近距离操作任务的相应尺寸内,在任务期间尽可能少的减少能量消耗。
导航、制导与控制。RSV平台为三轴稳定设计,姿态测量精度达0.05°,绝对轨道距离精度达百米,姿态控制精度达到0.25°。平台应携带相对导航滤波器,在交会与近距离操作阶段能够以1~5Hz的频率接收RSV有效载荷的姿态估计,并向有效载荷返回一个5Hz的滤波姿态。为实现RSV系统与客户卫星的交会与近距离操作,有效载荷能为RSV平台相对导航滤波器以1Hz频率提供方位数据。与客户卫星交会时,其作用范围为160~1km,在与有效载荷在轨交付(POD)系统交会时,其作用范围为20~1km。同时,在1km~100m范围内,有效载荷以5Hz的频率向平台相对导航滤波器提供三维位置数据,在小于100m范围内,有效载荷实施抓捕,以5Hz的频率向平台相对导航滤波器提供六维位置数据。
热控系统(TCS)。若RSV的有效载荷不向平台传输热能,则有效载荷的质量会有所增加。热控系统设计则解决了这一难点:平台为有效载荷的加热器提供开关电源,并处理温度传感器(约50个铂金电阻温度计和约32个热敏电阻),使得有效载荷能够在RSV的所有操作模式和任务阶段获取能量。
任务管理飞行软件。RSV平台和有效载荷共享任务管理器功能,因此接口的开发将成为两者协同工作的关键。平台的任务管理器将监视平台和有效载荷的运行状态,支持项任务活动。商业合作公司研发的平台任务管理器提供可配置多功能的故障检测、隔离与恢复(FDIR)能力,能够响应平台和有效载荷的活动需求与故障检测。同时,平台任务管理功能为支持在轨服务的任务活动,为平台和有效载荷提供运行状态。
RSV机器人有效载荷的设计寿命一般为5~8年,在服务过程中使用高带宽、低时延/低抖动通信,可以在脚本操作、自主操作及遥操作模式下运行。以最优化服务情况感知为目的,设计有效载荷布局(组件/工具布局、机械臂布局、近距离感知相机布局等)。
RSV有效载荷布局设计有两种方式:双臂系统和单臂系统。
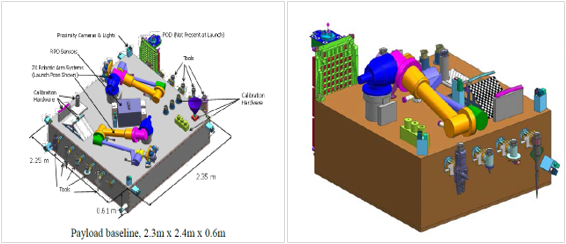
以上两种布局方式都包括FREND Mark II机械臂、相机和各类抓捕工具等。
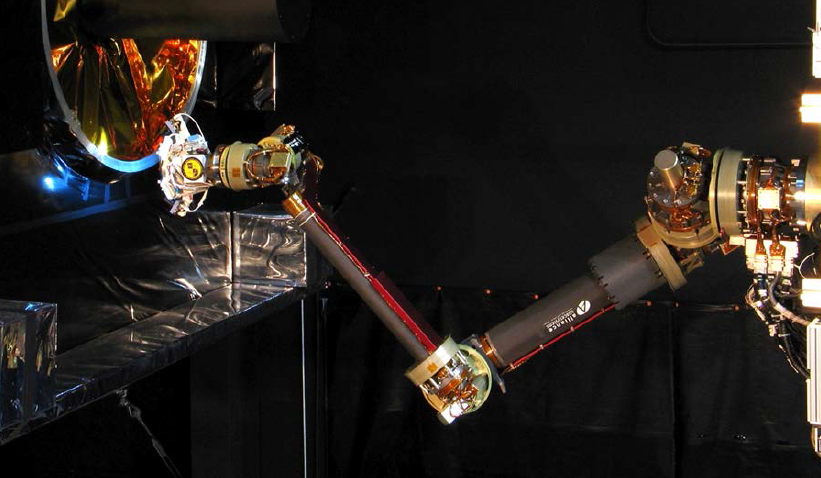
FREND Mark II机械臂。FREND Mark II机械臂是RSV有效载荷的核心。FREND Mark II机械臂是原FREND机械臂的升级版,集成了原FREND机械臂多年的测试经验。机械臂长2米,拥有7个自由度,能在GEO的极端环境及地球1G环境中运行。在地面上测试阶段,指令速率为500Hz,机械臂末端位置精度优于±1mm,能够保证FREND机械臂在GEO上进行安全、灵活、可靠的操作。
机器人有效载荷飞行软件。机器人控制算法和飞行软件是空间机器人系统的重要组成部分。该软件包括能够执行脚本操作、远程操作、部分或全部自主操作的高效有效载荷任务管理器,能够根据不同的在轨任务使用适的操作模式,还能进行故障检测、隔离及恢复等操作。飞行软件还包括能够进行机械臂在轨安全操作和规避在轨操作障碍的机械臂轨迹规划等。飞行软件能够不断验证有效载荷的安全操作,并进行在轨服务操作的各项测试。最后,该软件还具备CT&DH功能,可实时命令与遥测处理、命令序列处理、有效载荷电子设备的热功率控制以及大容量存储单元管理。
机械臂末端系统。FREND机械臂末端有旋转工具驱动器、力矩传感器及其电源/数据连接。为了更好的完成在轨服务,美国海军研究实验室开发了一个能够进行灵活操作的机械臂末端系统。该系统包括工具转换装置、任务灯、多台照相机以及控制电子装置,以便与FREND机械臂相连。系统能够进行力/力矩传感器的信号调节,相机和任务灯可进行视觉伺服手臂控制和近距离检查,也可以为遥操作地面控制提供图像。
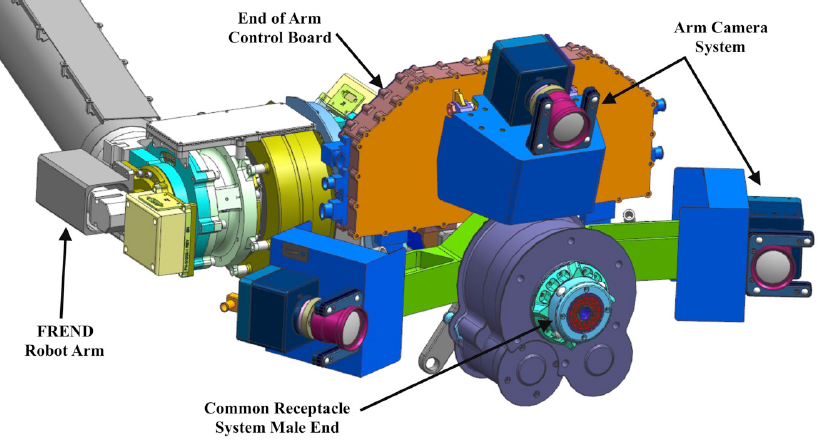
机器人工具套件。主要配备了能够抓捕客户航天器的Marman环形抓捕工具、螺栓孔抓捕工具、液体远程抓捕工具,POD系统捕获工具、四指人形手以及异常分析工具等。
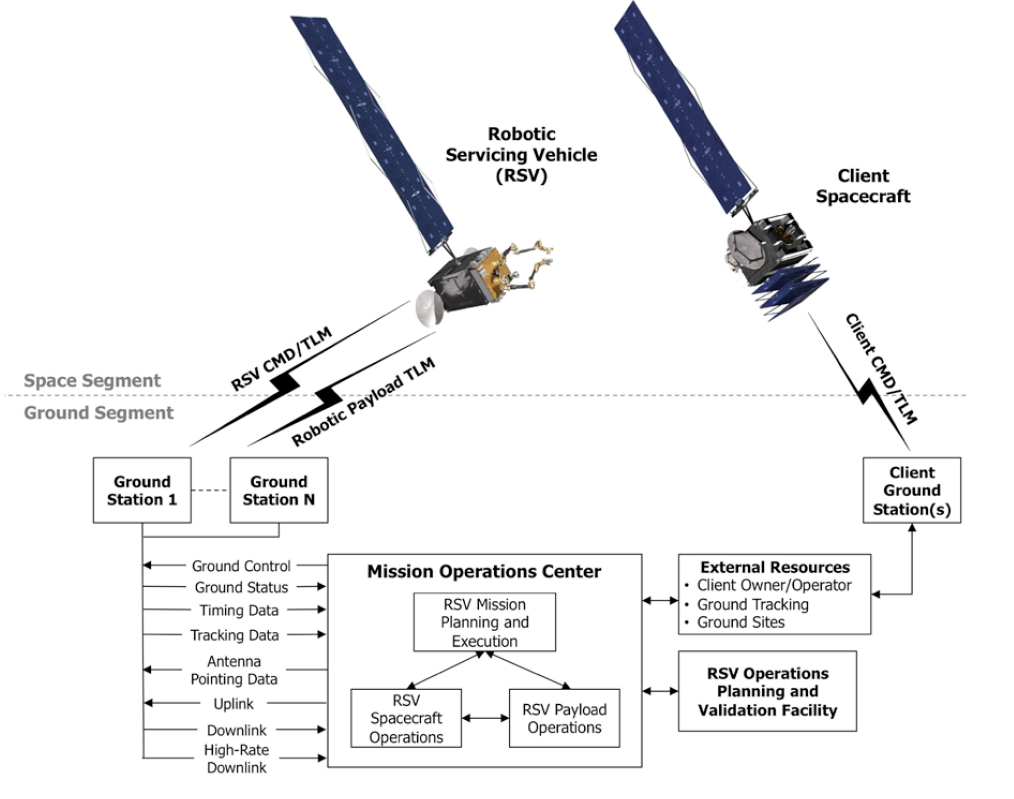
RSGS项目的地面站必须支持RSV系统在整个地球同步轨道中的服务操作。它需要支持RSV平台及其有效载荷的操作,并规划、训练和执行在轨服务任务。商业合作公司主要负责地面站的运营。地面站需要与卫星进行实时对接,以便协调、计划和执行所有RSV系统的服务操作,还应通过高保真任务模拟器和硬件测试设施进行任务支持。地面站在为任务提供信息保障和网络安全方面发挥关键作用,它必须提供安全的图像收集、分发和存储功能。
地面站包括一个任务操作中心(MOC),以满足RSV服务操作的所有需求、一个互补的无线电频率(RF)通信方案以及实现地球同步轨道全面覆盖的基础设施。
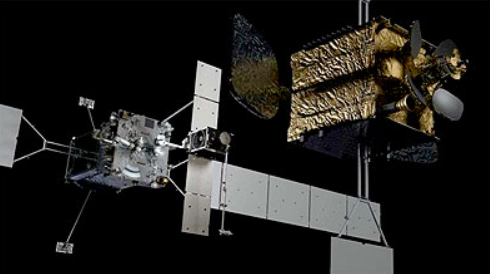
2020年3月,DARPA官宣称选择了诺斯罗普·格鲁曼公司的子公司 SpaceLogistics作为其商业合作伙伴。而该公告是在诺斯罗普·格鲁曼公司成功运营其第一台卫星服务任务扩展车(MEV)之后发布的。MEV-1于 2019年10月发射,2020年2月为一颗Intelsat通信卫星进行在轨服务,使其能够再运行五年。该任务扩展车第二代MEV-2于2020年8月发射,2021年达到地球静止轨道,4月与另一颗通信卫星 Intelsat 10-02进行交会对接。
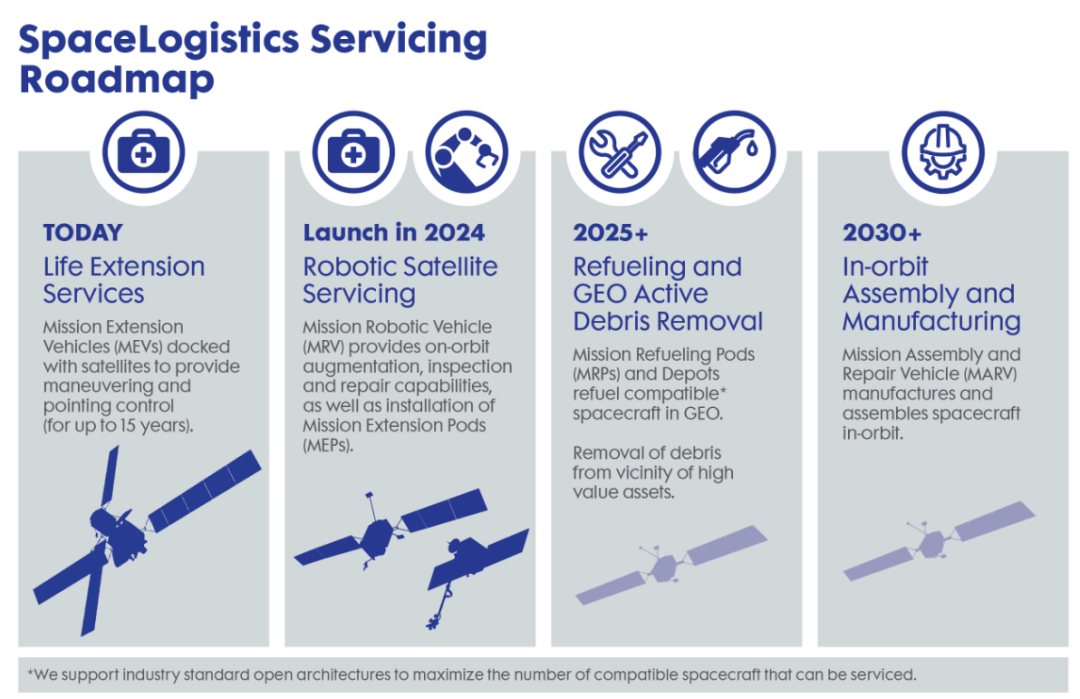
SpaceLogistics公司称,该项目目前只能进行用MEV进行卫星延寿服务,2024年发射任务机器人飞行器(MRV)提供在轨增强、检查和维修服务,2025年后提供在轨补燃和GEO轨道碎片主动清除服务,2030年后有望完成在轨装配与制造。
RSGS项目预计实现在轨检查、维修、转移、升级服务,该项目可赋予卫星更长的寿命,使在轨资产实现可持续利用。
由于RSGS项目采用的是公私合作,商业公司进行平台研制并负责地面站运营,这样有利于带来经济效益,并能够进一步进行优质资源升级。
在轨服务既可以辅助航天器变轨,又可以进行在轨升级,一系列的操作可提升在轨系统的各项能力,使在轨资产得到最大化利用,增加在轨系统的生存能力,提升在轨体系弹性。

