作者:王博,极视角科技算法研究员
微信公众号:OpenCV学堂
关注获取更多计算机视觉与深度学习知识
简单说明
链接: https://pan.baidu.com/s/1FoC0n7qMz4Fz0RtDGpI6xQ密码: 7mhs
https://github.com/WongKinYiu/yolov7跟YOLOR是同一个作者的。
OpenCV+YOLOv7
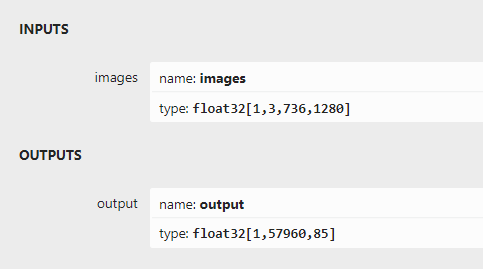
推理过程跟之前的YOLO系列部署代码可以大部分重用!这里就不在赘述了,详细看源码如下:输出部分直接解析最后一个输出层就好啦!
详细实现代码如下:
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace dnn;
using namespace std;
struct Net_config
{
float confThreshold; // Confidence threshold
float nmsThreshold; // Non-maximum suppression threshold
string modelpath;
};
class YOLOV7
{
public:
YOLOV7(Net_config config);
void detect(Mat& frame);
private:
int inpWidth;
int inpHeight;
vector<string> class_names;
int num_class;
float confThreshold;
float nmsThreshold;
Net net;
void drawPred(float conf, int left, int top, int right, int bottom, Mat& frame, int classid);
};
YOLOV7::YOLOV7(Net_config config)
{
this->confThreshold = config.confThreshold;
this->nmsThreshold = config.nmsThreshold;
this->net = readNet(config.modelpath);
ifstream ifs("coco.names");
string line;
while (getline(ifs, line)) this->class_names.push_back(line);
this->num_class = class_names.size();
size_t pos = config.modelpath.find("_");
int len = config.modelpath.length() - 6 - pos;
string hxw = config.modelpath.substr(pos + 1, len);
pos = hxw.find("x");
string h = hxw.substr(0, pos);
len = hxw.length() - pos;
string w = hxw.substr(pos + 1, len);
this->inpHeight = stoi(h);
this->inpWidth = stoi(w);
}
void YOLOV7::drawPred(float conf, int left, int top, int right, int bottom, Mat& frame, int classid) // Draw the predicted bounding box
{
//Draw a rectangle displaying the bounding box
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255), 2);
//Get the label for the class name and its confidence
string label = format("%.2f", conf);
label = this->class_names[classid] + ":" + label;
//Display the label at the top of the bounding box
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
//rectangle(frame, Point(left, top - int(1.5 * labelSize.height)), Point(left + int(1.5 * labelSize.width), top + baseLine), Scalar(0, 255, 0), FILLED);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);
}
void YOLOV7::detect(Mat& frame)
{
Mat blob = blobFromImage(frame, 1 / 255.0, Size(this->inpWidth, this->inpHeight), Scalar(0, 0, 0), true, false);
this->net.setInput(blob);
vector outs;
this->net.forward(outs, this->net.getUnconnectedOutLayersNames());
int num_proposal = outs[0].size[0];
int nout = outs[0].size[1];
if (outs[0].dims > 2)
{
num_proposal = outs[0].size[1];
nout = outs[0].size[2];
outs[0] = outs[0].reshape(0, num_proposal);
}
/////generate proposals
vector<float> confidences;
vector boxes;
vector<int> classIds;
float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth;
int n = 0, row_ind = 0; ///cx,cy,w,h,box_score,class_score
float* pdata = (float*)outs[0].data;
for (n = 0; n < num_proposal; n++) ///ÌØÕ÷ͼ³ß¶È
{
float box_score = pdata[4];
if (box_score > this->confThreshold)
{
Mat scores = outs[0].row(row_ind).colRange(5, nout);
Point classIdPoint;
double max_class_socre;
// Get the value and location of the maximum score
minMaxLoc(scores, 0, &max_class_socre, 0, &classIdPoint);
max_class_socre *= box_score;
if (max_class_socre > this->confThreshold)
{
const int class_idx = classIdPoint.x;
float cx = pdata[0] * ratiow; ///cx
float cy = pdata[1] * ratioh; ///cy
float w = pdata[2] * ratiow; ///w
float h = pdata[3] * ratioh; ///h
int left = int(cx - 0.5 * w);
int top = int(cy - 0.5 * h);
confidences.push_back((float)max_class_socre);
boxes.push_back(Rect(left, top, (int)(w), (int)(h)));
classIds.push_back(class_idx);
}
}
row_ind++;
pdata += nout;
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
vector<int> indices;
dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
this->drawPred(confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame, classIds[idx]);
}
}
int main()
{
Net_config YOLOV7_nets = { 0.3, 0.5, "models/yolov7_736x1280.onnx" }; ////choices=["models/yolov7_736x1280.onnx", "models/yolov7-tiny_384x640.onnx", "models/yolov7_480x640.onnx", "models/yolov7_384x640.onnx", "models/yolov7-tiny_256x480.onnx", "models/yolov7-tiny_256x320.onnx", "models/yolov7_256x320.onnx", "models/yolov7-tiny_256x640.onnx", "models/yolov7_256x640.onnx", "models/yolov7-tiny_480x640.onnx", "models/yolov7-tiny_736x1280.onnx", "models/yolov7_256x480.onnx"]
YOLOV7 net(YOLOV7_nets);
string imgpath = "images/dog.jpg";
Mat srcimg = imread(imgpath);
net.detect(srcimg);
static const string kWinName = "Deep learning object detection in OpenCV";
namedWindow(kWinName, WINDOW_NORMAL);
imshow(kWinName, srcimg);
waitKey(0);
destroyAllWindows();
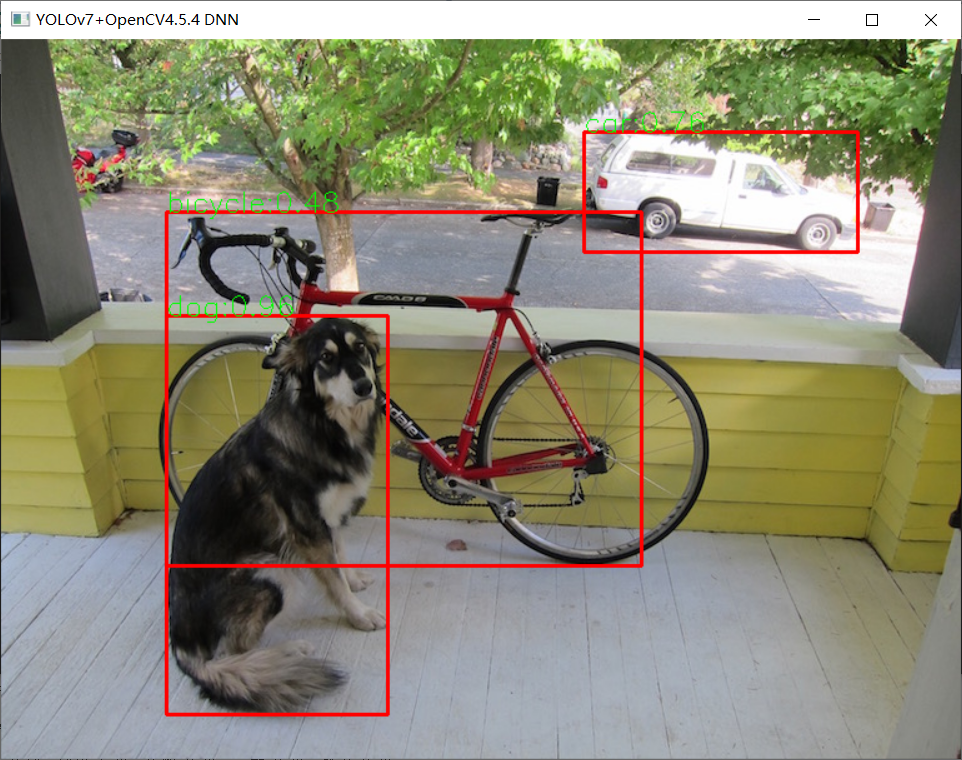
} 运行测试如下:

本文作者github主页:
https://github.com/hpc203/yolov7-opencv-onnxrun-cpp-py读书欲精不欲博
用心欲专不欲杂
扫码查看OpenCV+OpenVIO+Pytorch系统化学习路线图

推荐阅读
CV全栈开发者说 - 从传统算法到深度学习怎么修炼
2022入坑深度学习,我选择Pytorch框架!
Pytorch轻松实现经典视觉任务
教程推荐 | Pytorch框架CV开发-从入门到实战
OpenCV4 C++学习 必备基础语法知识三
OpenCV4 C++学习 必备基础语法知识二
OpenCV4.5.4 人脸检测+五点landmark新功能测试
OpenCV4.5.4人脸识别详解与代码演示
OpenCV二值图象分析之Blob分析找圆
OpenCV4.5.x DNN + YOLOv5 C++推理
OpenCV4.5.4 直接支持YOLOv5 6.1版本模型推理
OpenVINO2021.4+YOLOX目标检测模型部署测试
比YOLOv5还厉害的YOLOX来了,官方支持OpenVINO推理