

线上赛规则及流程发布后陆续收到参赛同学和老师们的建议,一部分建议可以使得竞赛过程更完善,故增加此文档对智能视觉组的流程及相关细节进行补充说明。
在“第十七届全国大学生智能车竞赛线上比赛赛道设计”和“第十七届全国大学生智能车竞赛裁判员手册”文档中已经公布了视觉组场地准备的相关细节,这里再对一些细节做出说明。
5m×4m,5m为X轴,4m为Y轴,场地边缘需要使用宽5cm的醒目黄色布基胶带在场地外边缘粘贴,标示出边界;45cm,长65cm,车库位于X轴起点处,如下图所示;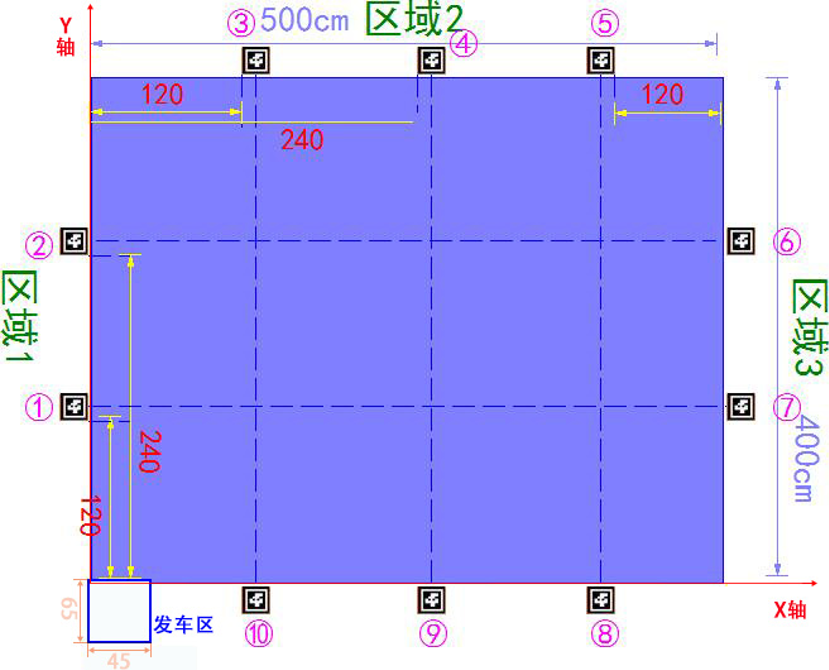
* AprilTag码:允许部署AprilTag作为视觉定位标识,具体摆放位置以及AprilTag标识码如下图所示。也可以不部署AprilTag定位方块。
可以淘宝上选择这种蓝色带背胶的标签纸,标定好坐标后贴在对应虚拟方框的右下角,这样在放置目标板时正好方便裁判进行定位,以确保目标板放置的位置正确以及横平竖直。

虚拟框的右下角贴蓝色标签,标签上用不明显的记号笔写上坐标点。需要注意虚拟框是20边长,图片是12CM边长,请自行确定好图片右下角对应的定位点再贴标签,确保图片能尽量放置在虚拟框的中间。如下图所示:
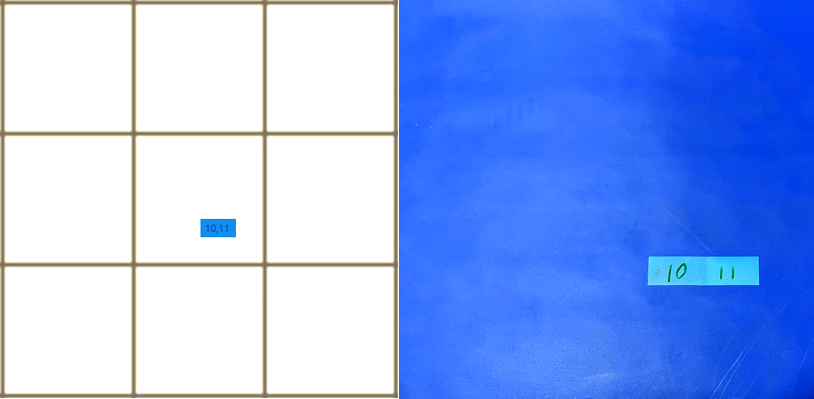
实际做出来如上图所示,虚拟框是测量完成就撤下了,所以只看到背景、标签及标签上的坐标。
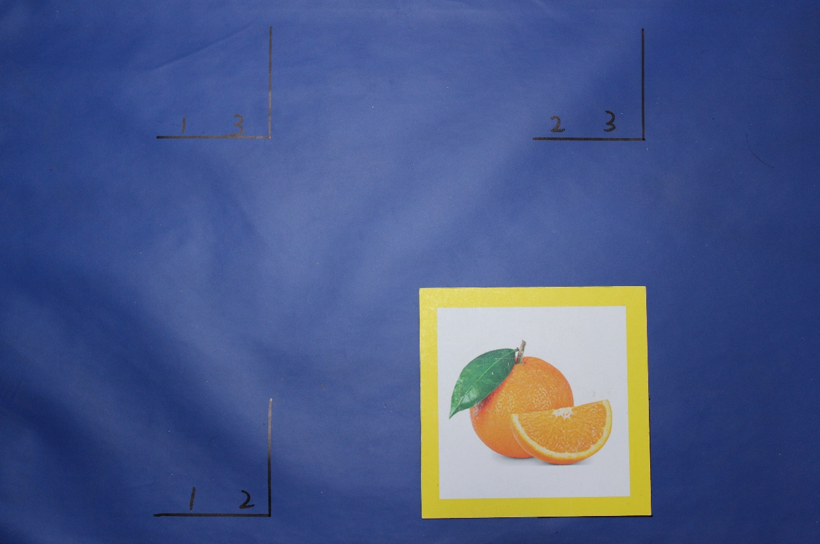
按标签纸的下边线和右边线定位放下目标板。或者直接用记号笔把虚拟框的右下角画出来,再写上坐标,如下图所示。用记号笔标记出虚拟框的右下角应当放置图片对应位置的直角边框,写上坐标点,需要注意虚拟框是20边长,图片是12CM边长,请自行确定好图片右下角对应的定位点再描直角边,确保图片能尽量放置在虚拟框的中间。也可以用记号笔进行图片放置点进行标识,标记原则与贴标签同理,用记号笔标记出虚拟框的右下角应当放置图片对应位置的直角边框,写上坐标点,需要注意虚拟框是20边长,图片是12CM边长,请自行确定好图片右下角对应的定位点再描直角边,确保图片能尽量放置在虚拟框的中间,如下图所示:
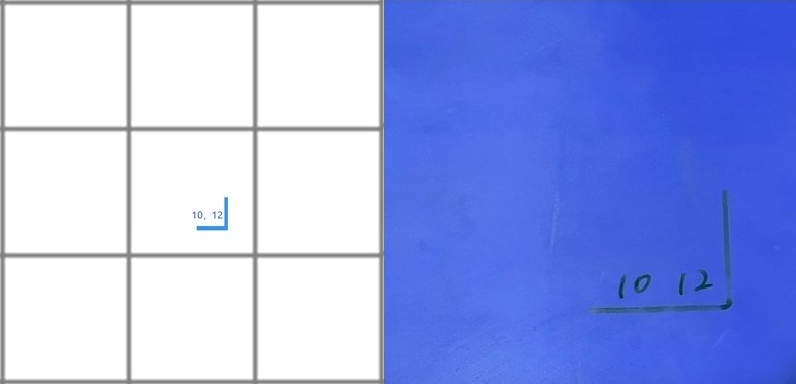
实际做出来如上图所示,定位完成后将虚拟方格的右下角直角两边描出,写上对应坐标点。推荐使用这种标记方法,不会脱落,需各赛点提前做好场地坐标点标识。
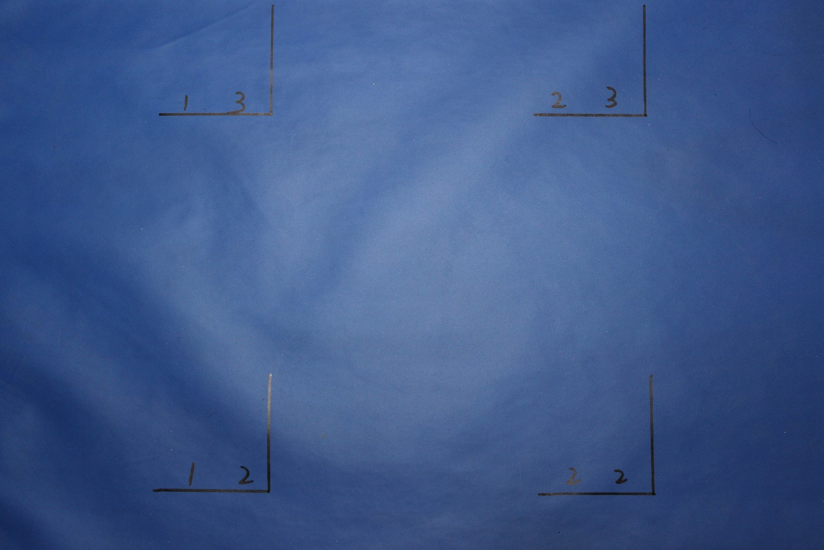
3位同学对场地进行标识,先在场地四条边上标注清楚从16cm和20cm开始每间隔20cm的刻度,然后由两位同学按照平行边的刻度依次拉卷尺让第三位同学按照刻度进行画线标识。

横纵坐标点都画好后变标记好了场地内的500个坐标点,然后再用记号笔写上坐标号,最终如下图所示:

放置图片示意如下:
❝备注:上面给定的方式,不知道是否会有队伍通过增加摄像头图像处理和文字识别完成自主坐标定位。所以要求书写的数字大小尽量小,只要满足人眼能够辨识即可。
为确保有足够的时间制作目标板,赛前3小时左右(或者上午发布,下午比赛)发布该赛区比赛用的图片,图片数量为30张,每个小类2张,需各赛点提前准备好30个用于粘贴图片的目标板底板。需要各线上赛点提前备好彩色打印机和打印纸以及裁切用的剪刀、美工刀或切刀,或者找好赛点就近的打印店,3小时足够制作好30个目标板;
坐标点还是打印在5m×7m的等比例框内,但线上赛的坐标点只会出现在以坐标原点为起点的4m×5m等比例范围内(长边为X轴)。打印了坐标点的A4纸允许用一张不大于A4纸的白色硬纸板撑起,避免A4纸弯曲带来的识别困难。
目标位置A4坐标纸,比赛时选手用这张纸给小车识别图片摆放的坐标(加粗的一边为下方X轴,用于提示选手放置方向)
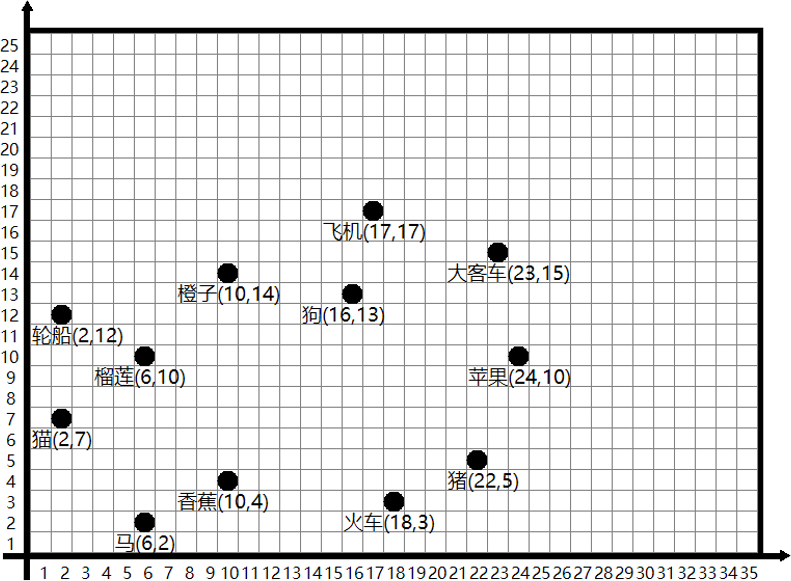
裁判根据摆放目标板示意图摆放图片目标板,如下图所示:
目标位置坐标纸不提前发布,由各赛区组委会比赛前发布给各赛点,由各赛点计时人员提前录入系统,并在赛前打印出6套方案,比赛时由参赛选手告诉主裁判选择叠放在一起(背面向上)的坐标纸的第几张,由主裁判按选手的选择拿出对应坐标纸给参赛同学用于识别,如果有参赛学生愿意,也可以将坐标点图片显示在PAD上,识别PAD上的图片来获取坐标信息,但PAD需自备,抽取方式变为选定序号后由裁判滑动到对应坐标图。
裁判依据摆放目标板示意图放置目标板时,可配备四名裁判,1名主裁判+3名边裁,主裁判负责与计时人员沟通且把控全程流程,边裁按主裁判示意按要求摆放目标板和检查目标板是否搬运正确,且建议每个边裁负责放置和检查一个大类,这样裁判的工作就比较清晰明了。
由于智能视觉组的比赛过程需要每次都重新布置目标板,所以需要较长的比赛时间,所以智能视觉组的比赛时间建议为30分钟或以上;
每次比赛的图片数量为12张,由30张图片组合成6套方案用于线上比赛时随机抽取;
①计时人员打开软件,输入比赛时间1800,点击确定;
②计时人员选择智能视觉组的表格,连接计时器(图标变成绿色,并且语言提示计时器连接成功),连接转发模块(蓝牙图标变成红色),当转发模块主、从机保持常亮,计时人员可告知主裁判可以通知选手入场;
③主裁判允许选手入场,并将转发模块交由选手安装在自己的车上,并将小车放置到发车区;
④选手模块安装完成后,主裁判通知选手进场扫码录入信息或者计时人员手动选择当前比赛队伍,由参赛选手确认队伍信息,选手确认无误后,按下确认按键,比赛30分钟倒计时开始;
⑤主裁判将6张目标位置A4坐标纸随机打乱后,背面向上放置在桌面上,选手告知主裁判选择第几张,主裁判从中抽取对应坐标纸,用于本次发出前的识别;
⑥裁判们按照选手抽取到的目标位置A4坐标纸对应的摆放目标板示意图进行图片的放置,计时人员按照选手抽取到的目标位置A4坐标纸编号更改上位机上选取的方案(因为第一次连接的时候要求必须选取了一个方案);
⑦场地布置好后,裁判将选手抽取到的目标位置A4坐标纸交给选手用作识别发车;
⑧选手按下计时器的开始按键后,打开小车电源,随即将目标位置A4坐标纸放置于镜头前进行识别,识别完成,小车自动发出或者允许再按一次按键后小车发出(这里需要注意,A4纸不能遮住光条,避免误触发导致计时结束);
⑨等待小车完成比赛;
⑩小车回到终点,主裁判告知计时人员成绩是否有效,是否需要加罚,若要加罚,加罚多少,计时人员应执行相应的操作,核实成绩前由3位边裁再次确认搬运是否正确并告知主裁判;
若小车因故障未能完成当次比赛,或未能回到车库让计时器停止,则当次比赛无效(完成了识别搬运但没回到车库的成绩认定可以参考文末是否回到车库的新判罚标准),比赛时间未用完,则重复5到10步骤。
上述计时流程按照逐飞科技为组委会制作的计时裁判系统编写,目前西部赛组委会要求采用该套系统为依据进行统一计时和结果判定,且由西部赛区承办学校乐山师范学院免费发放比赛系统及数据转发模块到各线上赛点,其他线上赛赛区可以自行购买逐飞提供的裁判系统和数据转发模块,也可以使用视频比赛计时方式确认比赛成绩。标准的比赛系统可以自动接收到车模发送的识别种类信息。对于线上比赛赛点,如果不使用标准比赛系统,可以采用以下方式完成比赛:
① 由参赛队伍自己的调试系统给出识别结果。如果参赛队伍自己车模调试系统能够接受到车模发送过来的识别信息,并且能够显示在自己的电脑、手机、PAD上,可以以此为识别判断结果;
② 由车载显示器显示识别结果:可以通过车上的LED,LCD等显示器显示出识别种类。然后通过视频记录识别结果并进行比赛结果判断。
其他线下赛赛区由逐飞科技赠送比赛计时裁判系统给承办学校,采用该套系统为依据进行统一计时和结果判定。
计时裁判系统软件及说明书下载链接(说明书里增加了A4坐标纸打印方法说明):
全功能计时器(可适用于智能视觉组、四轮摄像头组、四轮电磁组、平衡单车组、无线充电组、多车编队组、完全模型组)上位机软件及说明书。
80mm,厚度不大于1mm,用于粘贴图片和固定圆形铁片的背板可以是亚克力或3D打印,厚度不大于1mm。180秒比赛上限取消:成绩上限180秒取消,上限999.999秒,比赛时间本来需要比较长,如果再加罚,比较容易超过180,所以视觉组放开之前的限制;30S。其他罚时标准请查看裁判手册。3张或6张)且不要求回到车库,如能完成也可以进行完赛认定,最高获得分赛区三等奖;为方便各参赛同学更清晰的了解比赛流程,且给各赛点裁判及计时人员提供参考,委托逐飞科技为大家拍摄并制作了智能视觉组比赛流程演示视频,演示视频B站链接如下:
https://www.bilibili.com/video/BV1VY4y1J729/
