

本文引用格式
刘 娅,李孝辉,赵志雄,等.基于北斗卫星的纳秒级全球授时系统[J]. 导航定位与授时, 2022, 9(3): 14-22.
基于北斗卫星的纳秒级全球授时系统
刘 娅1,2,3,李孝辉1,2,3,赵志雄1,樊多盛1,2,陈瑞琼1,许龙霞1,钦伟瑾1
(1.中国科学院国家授时中心,西安 710600;2.中国科学院时间频率基准重点实验室,西安 710600;3.中国科学院大学光电学院,北京 100049)
摘 要:北斗三号系统的基础服务可以为全球用户提供精度优于20ns的信号,更高精度的时间同步应用,需要如GNSS共视、全视、PPP或卫星双向时频传递等专用方法,成本高,并且需要专业维护,只适合小范围应用。在研究了各种高精度时间比对技术的基础上,基于国家授时中心的标准时间UTC(NTSC),提出了基于北斗卫星实时共视、实时全视和实时PPP多种技术互补融合的纳秒级全球授时方法。结合时延绝对标定与分段标定组合的设备时延标定,以及振荡器动态驯服等技术,建立了标准时间远程复现系统,由服务端和用户端两部分组成。服务端由国家授时中心维护,用户仅需要安装一台标准时间复现设备,并通过互联网或北斗短报文信道自动持续从服务端获取服务数据,即可在本地恢复出溯源至标准时间UTC(NTSC)的时间频率信号。系统可为全球用户提供与UTC(NTSC)偏差小于5ns的1PPS信号,以及万秒频率稳定度优于5×10-13、相对频偏小于5×10-14的10MHz信号,授时A类不确定度优于2ns。目前已经为多个行业提供服务。
关键词:授时;时间同步;北斗共视;全视;PPP;钟驾驭
统一的时间是确保各类活动有序的关键。随着全球化进展,对时间统一的范围和性能需求也越来越高。随着北斗三号全球卫星导航系统(BeiDou-3 Navigation Satellite System,BDS-3)正式开通,标志着北斗卫星进入了全球服务阶段,BDS-3的系统时间(BDT)通过 UTC(NTSC)与国际标准时间UTC 建立联系,BDT 与协调世界时(Universal Time Coordina-ted,UTC)的偏差保持在 50ns以内(模1秒)[1]。2021年发布的《北斗卫星导航系统建设与发展》报告表明,BDS-3的基础服务可以为全球用户提供精度优于20ns的授时信号,此外还有差分增强和精密单点定位(Precise Point Positioning,PPP)等服务,具有提供更高精度的服务能力,BDT与UTC时间偏差保持在26ns以内[2]。用户通过BDS-3实际获得的时间服务性能还与使用的接收机测量性能、设备时延标定性能及信号大气传播时延改正精度等有关,用户获得的定时信号与BDT或UTC的偏差可能达到数十甚至数百纳秒。为了更准确地传递时间信号,发展了基于全球导航卫星系统(Global Navigation Satellite System,GNSS)卫星的共视、全视和PPP等时间频率比对方法,以及基于地球同步轨道(Geostationary Earth Orbit,GEO)卫星的卫星双向时频传递(Two Way Satellite Time and Frequency Transfer, TWSTFT)方法和基于光纤的时频信号比对方法,这些方法的时间比对精度可以达到纳秒甚至亚纳秒量级,主要用于守时实验室或者高性能原子钟间比对。为保证时间比对结果的准确性,产生UTC的国际计量局(Bureau International des Poids et Mesures,BIPM)会定期组织巡回校准活动,将便携的GNSS时间传递接收设备搬运至各参与比对的守时实验室,校准设备时延。
为了向用户提供精准时间服务,美国国家标准与技术研究院(National Institute of Standards and Tech-nology,NIST)开通了时间测量和分析服务系统(Time Measurement and Analysis Service,TMAS)[3]和多源共视驯钟系统(Multi-Source Common-View Dis-ciplined Clock,MSCVDC)[18],支持基于全球定位系统(Global Positioning System,GPS)共视,不断比对客户本地时间与美国国家标准时间UTC(NIST)的偏差,并通过互联网每10min向客户报告一次新结果,时间比对的A类不确定度优于2ns,合成不确定度15ns。MSCVDC还支持通过共视比对结果驯服铷钟或铯原子钟的方式为用户提供直接溯源至UTC(NIST)的时间信号,其本质是在用户所在地恢复出UTC(NIST),恢复的时间与UTC(NIST)的偏差约10ns,峰峰值不超过25ns。
英国皇家物理实验室(National Physical Laboratory,NPL)产生和保持英国的国家标准时间,开发了一套基于GPS共视的授时服务系统,可以为申请的用户提供与标准时间UTC(NPL)直接的比对服务,校准用户的时频设备,溯源至UTC(NPL)的时间不确定度为10ns(1σ),相对频率偏差为5×10-14(1σ,1天平均)[4]。
中国计量科学研究院研制了一套基于GNSS共视的远程时间溯源装置(NIMDO),通过比对结果驯服铷原子钟,可产生同步于UTC(NIM)的1PPS和10MHz信号,1PPS相对于UTC(NIM)的时间偏差优于10ns(95%),10MHz相对频率偏差优于1×10-13,时间偏差测量不确定度优于5ns[5-6]。
国家授时中心产生和维持着标准时间UTC(NTSC),在为北斗提供时间溯源服务基础上,以在广泛区域给用户提供更高精度的授时服务为目标,开发了标准时间远程复现系统,于2014年开始提供服务[7-10]。目前,已发展为支持基于GNSS的实时共视、全视和PPP等多种比对技术,可为全球用户提供溯源至UTC(NTSC)的时间频率信号,相对UTC(NTSC)的时间偏差小于5ns,频率偏差小于5×10-14,时间偏差测量A类不确定度优于2ns,优于国内外同类设备。
授时是指把标准时间通过有线或无线传送到远距离,供时间比对、时间同步使用,与一般时间传递或比对的区别是授时发播的是标准时间。国家授时中心产生和保持我国的标准时间UTC(NTSC),与UTC偏差常年保持在5ns以内(见BIPM每月发布的Circular-T)。标准时间远程复现系统以UTC(NTSC)为基准,通过实时时间比对技术和振荡器驾驭技术在用户本地恢复出与UTC(NTSC)偏差小于5ns的时间信号,频率万秒稳定度优于5×10-13,10万秒稳定度优于5×10-14,相对频偏小于5×10-14的10MHz频率信号,时间偏差测量的A类不确定度优于2ns。其中,为用户提供与UTC(NTSC)偏差小于5ns的时间信号,是指基于比对结果对振荡器驾驭后,输出的1PPS信号边沿不能完全与UTC(NTSC)主钟1PPS对齐,残余的最大偏差小于5ns。为降低该残余偏差对使用的影响,同时为用户提供对应时段的残余偏差测量值,该测量值相对真值的随机起伏即比对A类不确定度,优于2ns(24h数据的RMS)。用户使用信号的同时,辅以测量值修正后,最终可得到溯源至UTC(NTSC)的时间不确定度小于2ns。
标准时间远程复现系统使用基于GNSS的实时共视、全视和PPP三种远程比对技术,可根据应用场景自由切换三种比对手段,单独使用或加权融合;本地振荡器可选配晶体振荡器、普通性能铷振荡器、高性能铷振荡器和铯原子钟及被动氢原子钟等,测量数据更新频度支持1min、5min、10min和自定义等多种,满足各行业用户对时间、频率信号的需求。
基于北斗卫星的实时共视比对基本原理是在国家授时中心的服务端观测卫星钟与UTC(NTSC)的偏差,将偏差数据通过网络实时广播给用户端,用户端设备接收偏差数据,结合本地相同时段观测的卫星钟与本地参考时间偏差,计算本地参考时间与UTC(NTSC)的偏差,为控制振荡器提供测量数据。
数据处理流程:各站利用北斗定时接收机接收北斗卫星导航信号,首先测得含有卫星钟δt(s)和接收机时间偏差的伪距ρ,然后利用接收机天线坐标和广播星历预报的卫星轨道,计算卫星和接收机真距r(含轨道预报误差),伪距与真距的差包含了卫星和接收机钟差、传播路径上的各种时延,以及卫星轨道等各种误差项,用双频伪距测量值修正电离层延迟I,用经验模型修正对流层时延T,进而计算得到含有误差的接收机时间与各颗卫星钟的钟差,最后结合事先测得的接收机时延改正参数Δt1和计数器持续监测的接收机时间与本地参考时间的时差值Ttic,生成本地参考时间与各颗北斗卫星钟的钟差TREFSV,TREFSV的计算如式(1)所示。
其中,c为真空光速;引入了未知参数ερ,表示含接收机伪距观测误差在内的各种剩余误差总和。
各用户端设备按约定的观测周期,将TREFSV拟合生成该时段各卫星的![]() 与来自服务端相同观测周期、相同卫星的TREFSV拟合值
与来自服务端相同观测周期、相同卫星的TREFSV拟合值![]() 做差,抵消卫星钟、卫星轨道预报误差等共性误差的影响,计算各站参考时间与标准时间的偏差。服务端只需将观测数据按约定间隔拟合后生成的
做差,抵消卫星钟、卫星轨道预报误差等共性误差的影响,计算各站参考时间与标准时间的偏差。服务端只需将观测数据按约定间隔拟合后生成的![]() 广播给用户,就可以实现共视比对,数据拟合可以降低原始观测数据中随机噪声的影响,还能将实时通信数据量降低到1000字节以内,利于工程实现。
广播给用户,就可以实现共视比对,数据拟合可以降低原始观测数据中随机噪声的影响,还能将实时通信数据量降低到1000字节以内,利于工程实现。
因为实时共视需要各用户端与服务端能同时观测到相同卫星,共视的卫星数量越多,越有利于降低测量随机误差;距离越近,两端观测数据的误差相关性越高,测量精度越高。结合北斗卫星在中国的几何分布和实测检验,北斗实时卫星共视最优作用距离约在3000km以内[11],更长基线可能会牺牲测量性能,为了能在更广泛区域为用户授时,引入了基于北斗的实时全视技术。
为满足与服务端更远距离(基线2000km以上)用户与标准时间UTC(NTSC)高精度比对的需求,不依赖两地有共同可视卫星的卫星全视成为更优选择。传统卫星全视依靠最终精密星历和钟差产品解算钟差,只能事后生成比对结果,因主要用于守时实验室高性能原子钟间比对,守时原子钟频率变化量很小,滞后结果不影响应用。但面向广泛用户的高精度授时需求,需要考虑普通振荡器的应用场景,该类振荡器的特点是频率变化相对较快,获得测试结果的时效性直接影响时间服务性能。因此,本文提出了实时全视的解决方案,主要流程与实时共视相似,区别在于时间比对的中间媒介不是卫星钟,而是第三方机构提供的超快速星历预报产品中钟差的归算基准。将服务端生成的UTC(NTSC)与归算基准的偏差通过网络广播到用户端,用户端设备接收偏差数据,结合用户端测得的本地参考时间与归算基准的偏差,就可以获得本地参考时间与UTC(NTSC)的偏差。目前,国内外有多家机构可以提供实时全视所需超快速预报的卫星位置和钟差产品,相较其他产品,超快速预报产品的主要特点是可靠性高,轨道精度5cm(STD),钟差精度优于1.5ns(STD),已满足实时共视比对需求。
实时全视数据处理流程:各用户端设备利用北斗定时接收机接收北斗卫星导航信号,首先测得伪距ρ,然后通过第三方机构获得超快速星历预报产品,经多项式内插生成对应观测时刻的卫星位置和卫星钟差,计算卫星与接收机距离r,计算接收机时间与归算基准的偏差δt(s);然后用双频观测值计算电离层延迟改正值I,使用经验模型改正对流层延迟T,并进行Sagnac效应、卫星天线相位中心、接收机天线相位中心和卫星发射时延改正,改正量用Δtother表示,接收机的时延改正量为Δt1,计数器测得接收机时间与本地参考时间的时差值为Ttic。对同一历元所有可视卫星按高度角加权,生成该时刻本地参考时间与归算基准的偏差TREFSV,TREFSV的计算如式(2)所示[12-13]。
其中,c为真空光速;引入未知参数ερ,表示含接收机伪距观测误差在内的各种残余误差总和。
服务端和各用户端设备按约定的观测周期,分别拟合TREFSV,生成代表该时段的偏差TUTCREFSV和TProREFSV。与实时共视时服务端广播的观测数据相比,服务端在全视比对时,每个观测周期仅需广播一条TUTCREFSV数据,进一步简化了通信数据量。各用户端设备接收来自服务端的TUTCREFSV数据,处理方式与共视完全相同,得到本地时间与UTC(NTSC)的偏差。
根据上述流程可知,只要用户端设备可以观测到北斗卫星,并能获得对应卫星的超快速星历产品,就可以直接与UTC(NTSC)比对,用户与服务端间没有距离限制,服务性能主要与星历产品、接收机性能有关。
受伪距测量误差以及超快速星历预报产品精度限制,实时全视的比对不确定度优于2ns,更高精度的比对需要寻求更高分辨率的测量方法,例如PPP。
实时PPP是在卫星共视和全视保障了基本应用需求的基础上,随着北斗卫星的第三方星历产品逐渐成熟,为满足更高精度授时需求发展而来的。实时PPP与实时全视的基本思路完全相同,主要区别在于使用测距码与载波相位测量数据结合,代替了仅使用码伪距测量值,使用实时卫星轨道和钟差产品代替超快速预报产品。
采用双频无电离层组合进行PPP解算,基于载波相位的TREFSV计算方程用式(3)表示。
根据不同的优化方法,可以简单地将磁场SLAM分为滤波和图优化两类。
其中,λ表示无电离层组合波长; 表示载波相位模糊度。获得本地参考时间与精密卫星钟差产品系统时间的偏差,按观测周期拟合后生成TProREFSV,再接收服务端广播的对应观测周期的TUTCREFSV,生成本地参考时间与标准时间的偏差[14-17]。基于实时星历产品,目前实时PPP可以实现优于1ns不确定度的比对。
表示载波相位模糊度。获得本地参考时间与精密卫星钟差产品系统时间的偏差,按观测周期拟合后生成TProREFSV,再接收服务端广播的对应观测周期的TUTCREFSV,生成本地参考时间与标准时间的偏差[14-17]。基于实时星历产品,目前实时PPP可以实现优于1ns不确定度的比对。
通过实时共视/全视/PPP可以得到各用户端本地时间与标准时间UTC(NTSC)的偏差,要实现本地时间与UTC(NTSC)同步,还需要对本地振荡器进行驾驭。为能产生更稳定、准确的时间频率信号,对振荡器驾驭需遵循两项基本原则:一是使本地时间与UTC(NTSC)偏差尽可能小;二是使频率长期稳定度最优的同时,尽可能少恶化短期稳定度。结合需求分析,对振荡器的时间变化特性建模预报,比事后调整更利于目标实现。典型的振荡器随时间变化模型如式(4)所示。
其中,a表示与参考信号的初始时差;b表示与参考信号的频率差;c表示振荡器的频漂;ε表示瞬时随机变化量。利用持续比对获得的历史时差数据,结合对各类振荡器的先验经验,确定对式(4)中各项参数的拟合方法,目前拟合工具较多且较为成熟,各有适用场景,在此不再赘述。需要特别注意拟合数据的长度选择,以及根据拟合结果结合对时间偏差的预期以及振荡器类型综合考虑制定对振荡器的驾驭策略,较为典型的方案是将驾驭按阶段细分,采用不同驾驭策略,精准实施。
为验证基于北斗卫星实时共视、全视和PPP向全球用户传递标准时间UTC(NTSC)的能力,国家授时中心建立了一套标准时间远程复现系统。基于云架构,设计扁平化的授时模式,任意节点可直接溯源至UTC(NTSC),获得本地时间与标准时间UTC(NTSC)的偏差。溯源技术支持单选实时共视、全视和PPP,或各比对结果融合;观测周期支持1min、5min、10min和自定义等多种间隔,满足各种振荡器与UTC(NTSC)同步需求。
标准时间远程复现系统组成结构如图1所示,由标准时间产生系统、远程时间比对基准设备和标准时间复现设备三类设备组成,其中标准时间产生系统为授时系统提供时间基准。本系统的时间基准是我国的标准时间UTC(NTSC),与UTC的偏差常年保持在5ns内。
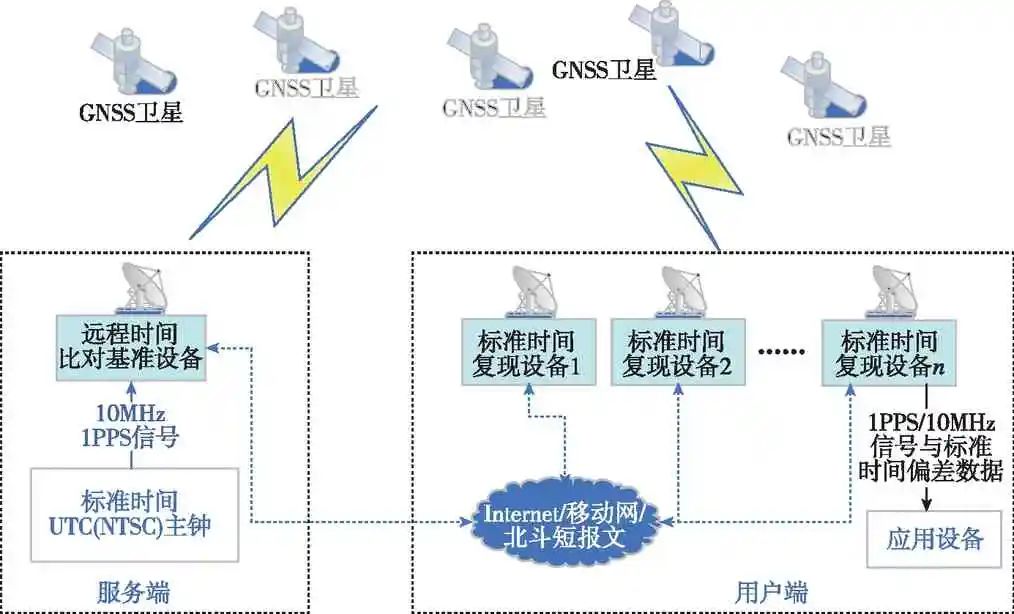 图1 标准时间远程复现系统组成图
图1 标准时间远程复现系统组成图Fig.1 Composition of UTC(NTSC) remote replicating system
远程时间比对基准设备是服务端的核心设备,用于按约定的各种观测周期、比对技术,持续产生观测数据TUTCREFSV和![]() 广播给用户设备。远程时间比对基准设备是系统运行的核心,为提高可靠性,采用异地冗余互备方案,由分布多地的多台设备共同组成,通过专用光纤同步网络确保各地参考时间统一至UTC(NTSC)主钟。
广播给用户设备。远程时间比对基准设备是系统运行的核心,为提高可靠性,采用异地冗余互备方案,由分布多地的多台设备共同组成,通过专用光纤同步网络确保各地参考时间统一至UTC(NTSC)主钟。
标准时间复现设备属于用户端设备,通过北斗卫星的实时共视/全视/PPP等比对技术,持续获得本地参考时间与UTC(NTSC)的偏差,进而驾驭本地振荡器,产生与UTC(NTSC)同步的本地参考信号。目前,标准时间复现设备支持驯服的振荡器类型包括晶振、铷钟、铯原子钟和氢原子钟等。用户安装一台标准时间复现设备,即可获得与UTC(NTSC)同步的1PPS时间信号和10MHz频率信号,以及当前时间信号与UTC(NTSC)的偏差信息和当前时刻的时码。
为满足不同用户安装需求,设计了通过互联网、北斗短报文等多种渠道广播服务端的观测数据,其中对通过互联网传输的观测数据进行了授权和加密两层防护处理,而北斗短报文模式下仅北斗授权用户才能获得,安全性更高。
标准时间远程复现系统还支持为授权用户提供数据分析和管理服务,满足个性用户对标准时间的需求。
作为授时系统,还需要特别关注所传递时间被用户获得的准确性,即最终用户获得时间的误差。授时误差可以分为随机误差和系统误差,其中随机误差与使用的时间比对方法、环境变化、器件等相关,一旦授时方案确定后,难以改变;系统误差具有重复性、单向性、可测性等特征,是影响授时误差的主要因素,来源主要是设备时延、电缆时延、转接器等信号在各环节传输引入的时延,在一定周期内重复可测,对系统误差的精确标校能力,影响了标准时间远程复现系统最终为用户提供授时服务的能力。
由于用户场所条件差异大,需要根据安装条件配置不同的馈线型号、长度,甚至还可能需要加入功分等器件,增加了时延的不确定性。为此,设计了时延的分段标校方案。将时延相对固定的用户端设备主机和天线进行组合标校,单独标校时延不固定的馈线,其中主机与天线的组合时延绝对标校原理如图2所示。

图2 设备时延校准原理图
Fig.2 Schematic diagram of equipment time delay calibration
被校准的标准时间复现设备与远程时间比对基准设备并址短基线安装,独立天线,预先标定馈线时延,待设备运行稳定后,使用时间间隔计数器持续测试复现设备输出1PPS与UTC(NTSC)主钟信号的时差,不少于24h。测试结果扣除测试电缆和馈线时延后,与对应测试时段标准时间复现设备输出的本地参考时间与UTC(NTSC)偏差做差,统计差值的均值即为设备的固定时延。
GNSS接收天线至标准时间复现设备主机的馈线时延,与安装环境条件密切相关,按需配置,一般在百纳秒至数百纳秒之间。电缆时延的测试方法较为通用,标定不确定度与所使用的仪器性能相关,一般情况下远优于100ps。
为了检验系统的授时性能,以及对比实时共视、全视和PPP的性能差异,采用多系统双频定时接收模块结合铷振荡器,组成标准时间复现设备,分别在零基线和千公里基线条件下,对标准时间复现设备的授时性能进行测试,每一组测试持续不少于24h。测试原理如图3所示。零基线条件下,用时间间隔计数器直接测量复现设备输出1PPS与UTC(NTSC)主钟信号的偏差;千公里基线时,以UTC(NTSC)为参考,采用事后PPP比对技术校准当地的一台氢原子钟的1PPS和10MHz信号的偏差,用作测试参考,校准后氢原子钟的频率偏差小于5×10-15,频率稳定度优于4×10-15/d,优于被测标准时间复现设备时频信号的预期能力。
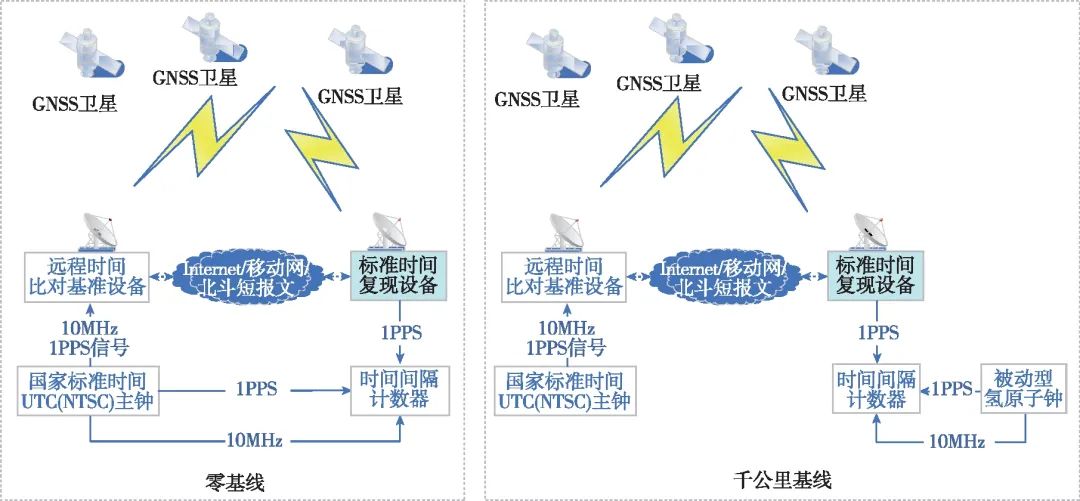
图3 授时性能测试原理
Fig.3 Principle for the test of timing service performance
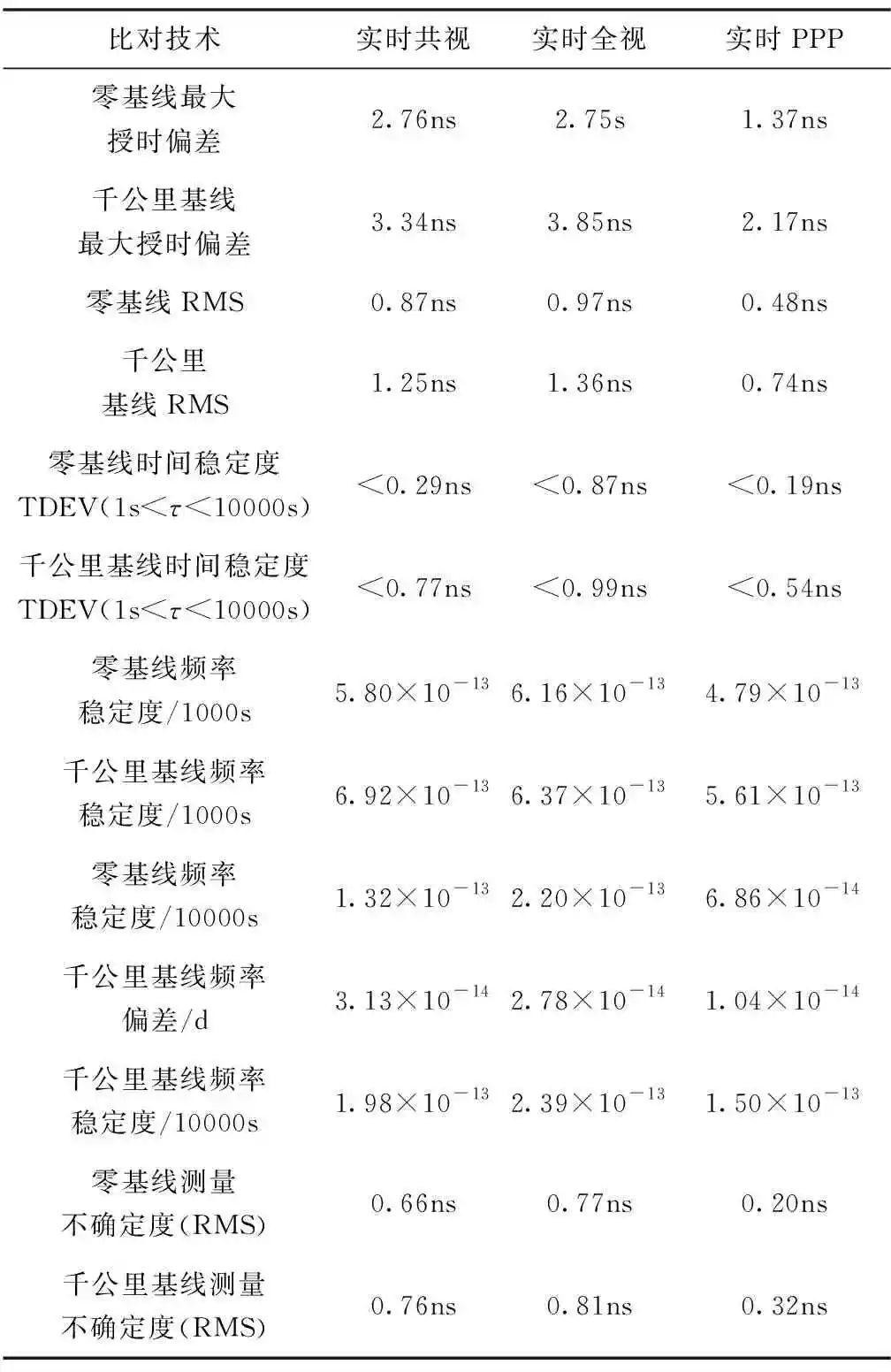
标准时间复现设备的输出时间与UTC(NTSC)的偏差如图4~图6所示,偏差数据的统计特征在表1列出。
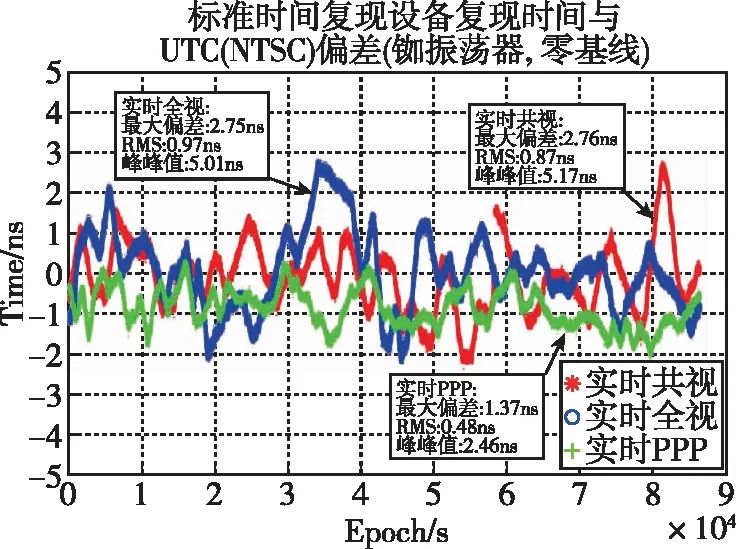
图4 零基线授时偏差
Fig.4 Deviation of timing service at zero baseline
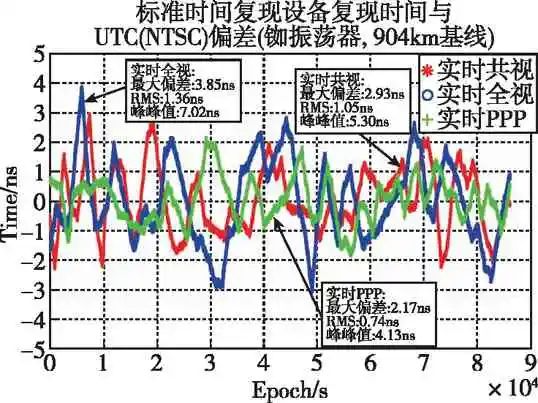
图5 基线904km授时偏差
Fig.5 Deviation of timing service at 904km baseline
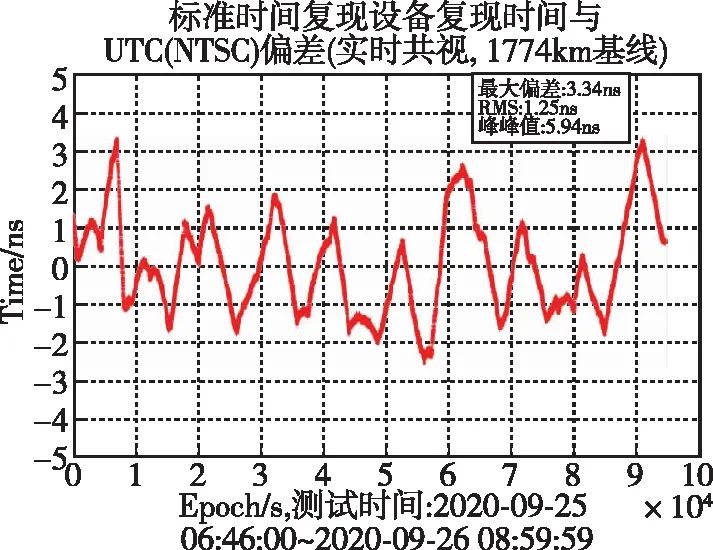
图6 基线1774km实时共视比对时,授时偏差
Fig.6 Deviation of timing service at 1774km baseline based on real-time CV
表1 标准时间复现性能测试结果汇总表
Tab.1 Test results summary of UTC(NTSC) remote replicating performance
观察图4~图6曲线发现,部分时段的时间偏差存在显著的单向漂移特性,为进一步分析其原因,为铷振荡模块单独增加了保温层,发现曲线改善明显,并证实主要与铷振荡器的温度特性有关。测试时,设备处于室温环境,实验室温度约有10℃变化,引起铷振荡器频率随机漂移。因此,对于具备温控条件的用户,将设备放置在恒温环境(温度变化小于2℃),会显著改善输出信号的频率稳定性。
实测千公里基线条件下,实时PPP测量值的均方根(RMS)优于0.35ns,较共视和全视的0.8ns,测量结果随机起伏更小,有利于振荡器准确建模和预报,因此实时PPP比对时复现信号的频率长期稳定度和时间同步精度均表现更优。
此外,还可以得出以下结论:
1)基线千公里内,实时共视比对不确定度差异较小,均优于1ns,主要得益于我国境内北斗可视卫星较多,基本在8颗以上,保障了不依赖第三方产品的北斗卫星实时共视,可支持我国国境范围内为用户提供与标准时间偏差不超过5ns、RMS小于1ns的时间信号,10MHz频率信号的稳定度优于5×10-13/10000s、相对频偏小于5×10-14;
2)受大环境影响,近两年不能在更远基线条件下开展基于北斗卫星实时全视的试验,仅对比了零基线和千公里基线的性能,结果显示,两种条件下测量结果24h的RMS值相当,分别为0.77ns和0.81ns,可见卫星全视的比对结果与基线长度相关度较低,可以满足更远距离的比对需求;
3)基于实时PPP比对技术,在零基线和千公里基线时,分别获得了0.2ns和0.32ns的比对A类不确定度,复现信号与UTC(NTSC)最大偏差控制在3ns以内,零基线的万秒频率稳定度进入了10-14量级,为将来进一步优化性能奠定了基础;
4)结合北斗卫星星座特点和已有试验基础,基线2000km以内,采用卫星实时共视,能实现优于2ns的比对A类不确定度。试验也证明,基于北斗卫星在基线7000km以上的欧亚比对中,依然有可共视卫星,支持开展比对,但因可用数据大幅减少而影响性能;实时全视技术因使用预报的星历与钟差,在千公里以内的短基线距离时,较共视技术的比对精度优势并不明显,更远如3000km以上时,优势才能充分显现;实时全视和PPP的比对性能与基线长度的相关性远不及实时共视技术,比对精度更高、覆盖范围更广,但依赖卫星的轨道和钟差产品,特别是当数据产品因可用性变化需要进行产品切换时,可能会引入新的不确定因素,从而影响性能,需要进一步研究优化方案。
综合对比三种实时远程比对技术,实时PPP比其他两种技术可以得到更准确的比对结果,随着实时星历钟差产品性能的进一步提升,未来还有进一步优化的空间,但是对第三方产品依赖也最高;得益于北斗卫星在中国区域的高密度覆盖,实时共视应用自由度最高,在中国区域内比对性能与卫星全视基本相当;实时全视为实时共视的有力补充,可以为一带一路沿线、海外用户等更大范围的授时应用,提供与国内性能相当的授时服务,多种比对技术的互补、融合,可以为用户提供更可靠的授时服务。
基于我国的标准时间UTC(NTSC)和覆盖全球的北斗卫星条件,国家授时中心团队开发了一套兼容实时共视、全视和PPP三种比对技术的标准时间远程复现系统,可以为全球用户提供授时服务,授时最大偏差小于5ns,取样间隔10000s以内的时间稳定度优于1ns,频率万秒稳定度优于5×10-13,相对UTC(NTSC)的频偏小于5×10-14,是北斗授时的有力补充,目前已经在多个行业得到应用。
参考文献(略)
