今天老师说有个分享会可以看下:

看起来很酷
然后就去听了,感觉还不错,这里把PPT的截图分享一下,其实是有原版的,但是水印太多了。。。我不喜欢

我查了一下,公司在江苏
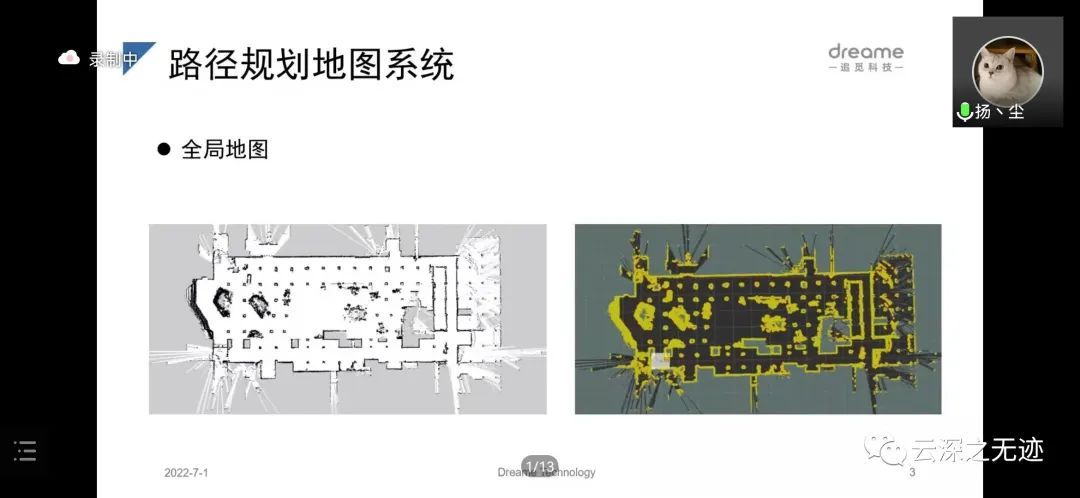
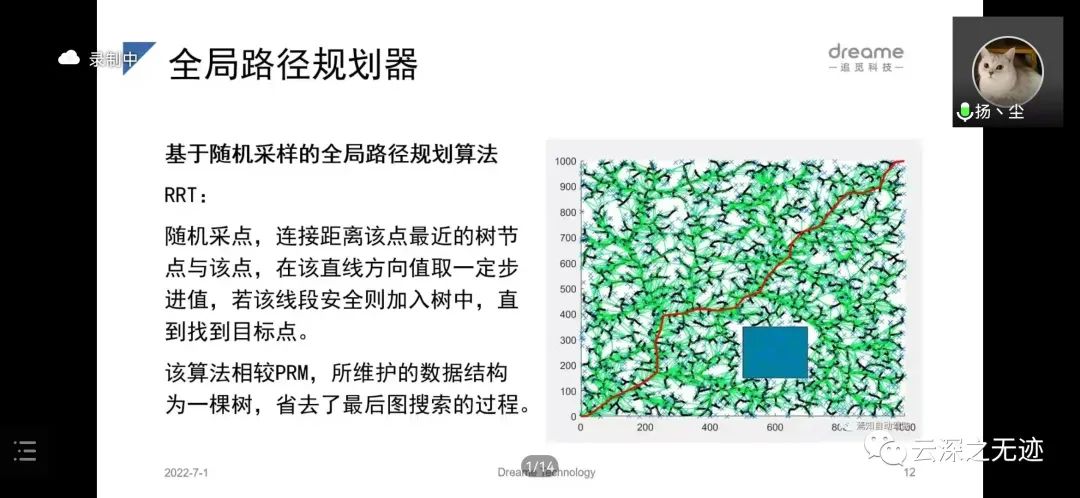
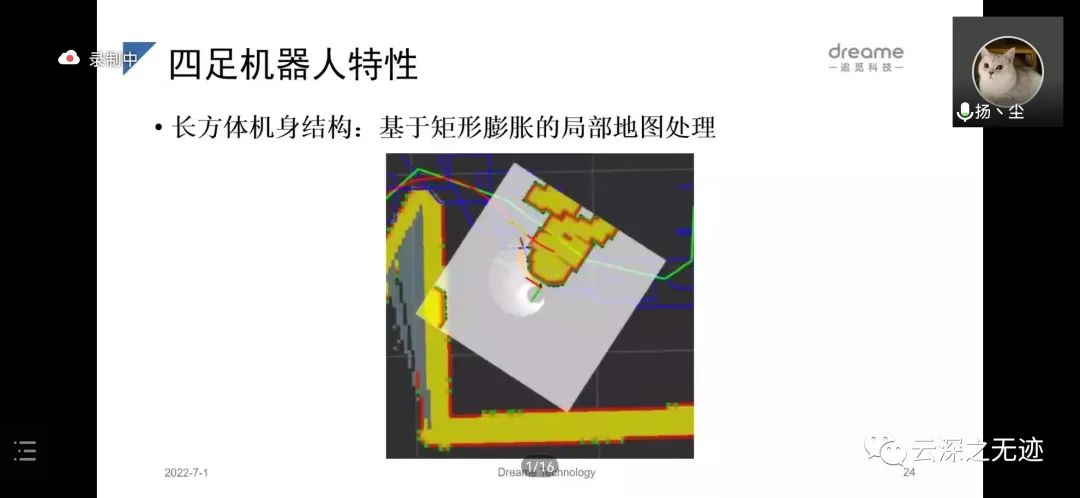
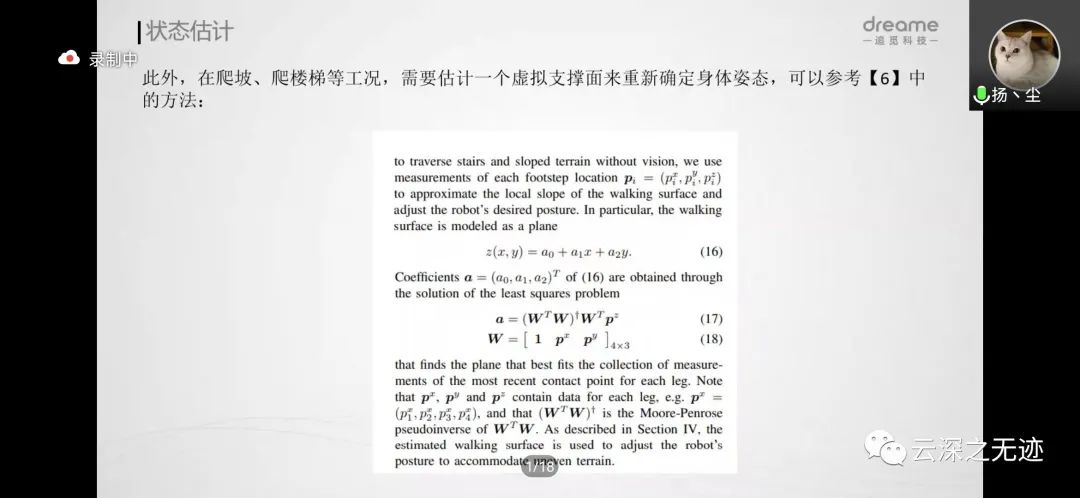
后面是给出了一个地图的腐蚀图
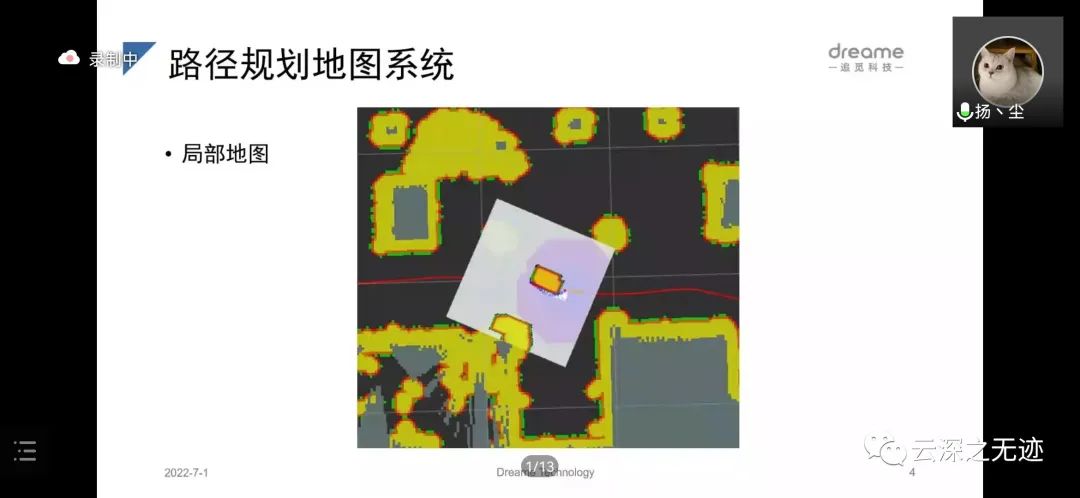
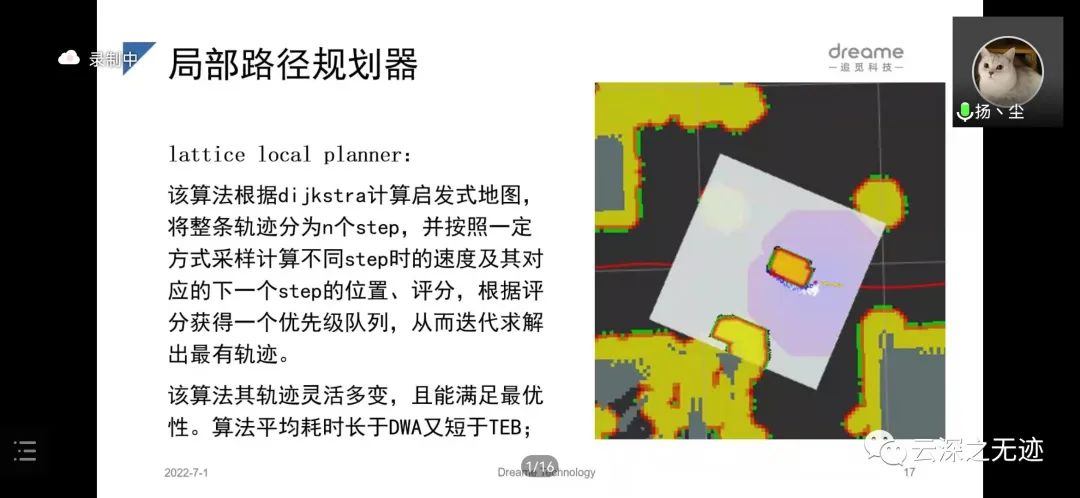
将四足机器人方块化进行路径规划


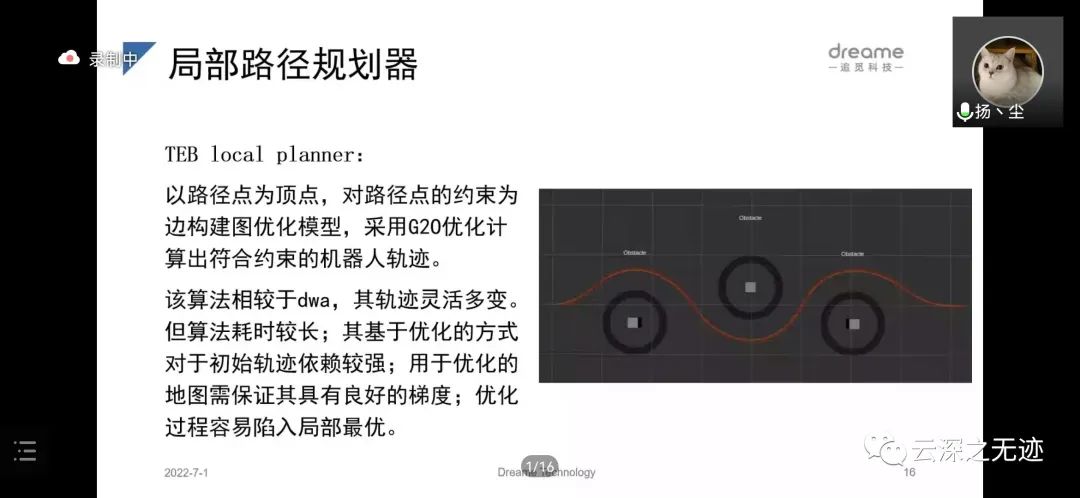
LLP,我也不懂,有空研究

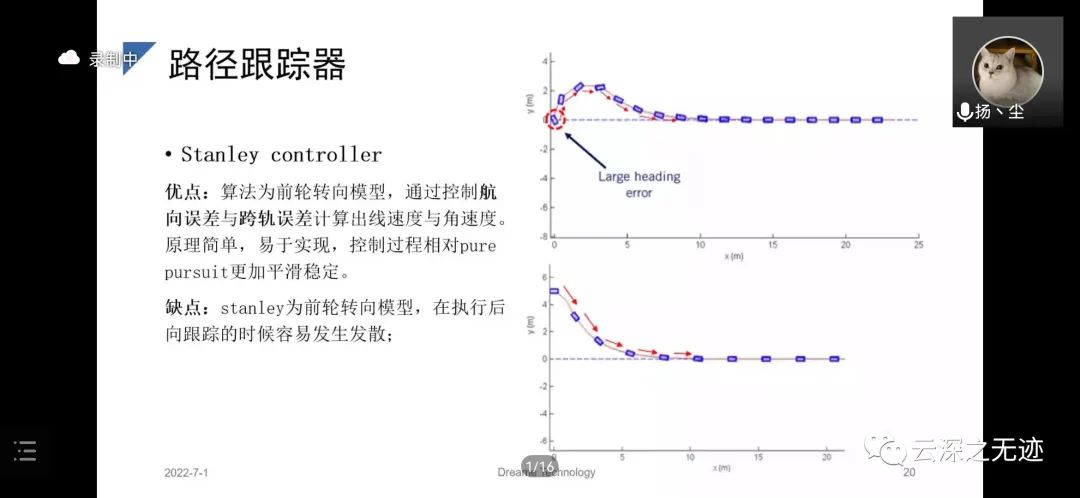
路径追踪算法还行,去年靠着PPC还混了个二等奖
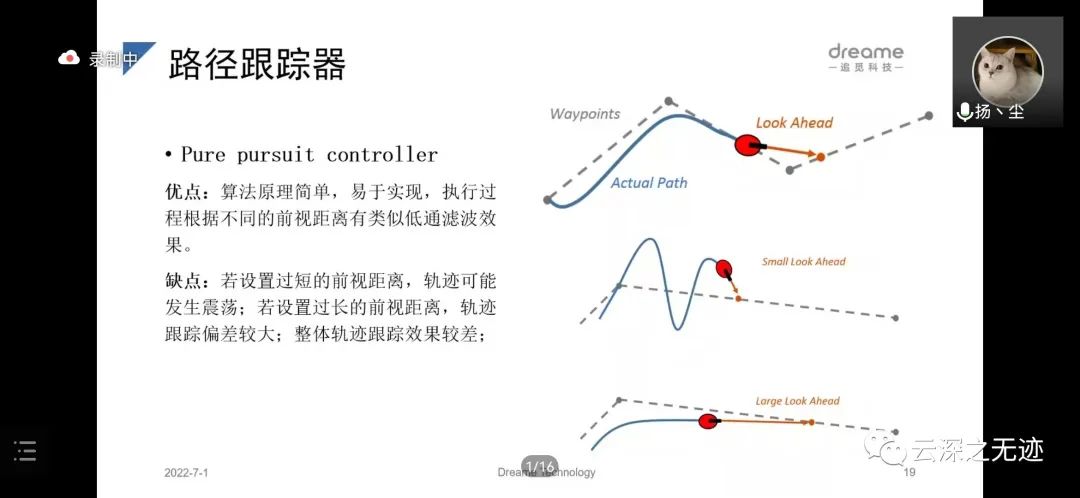
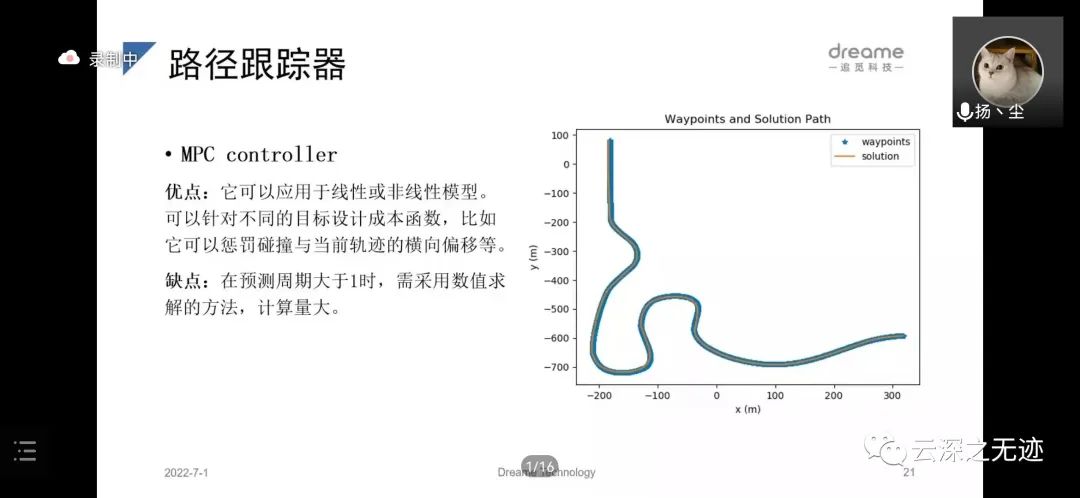
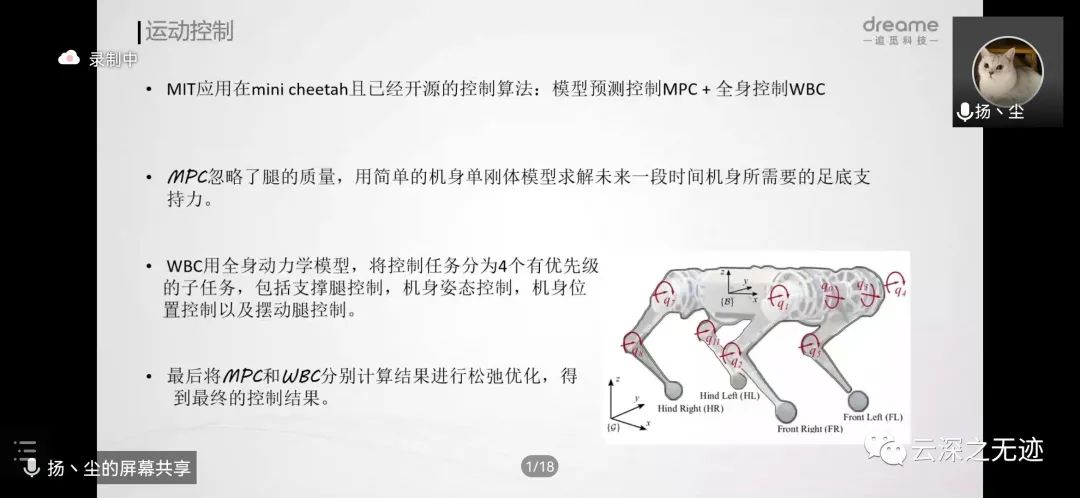
MPC是最好的,但是算力要求较高

MPC这个好像是公司自己研发的
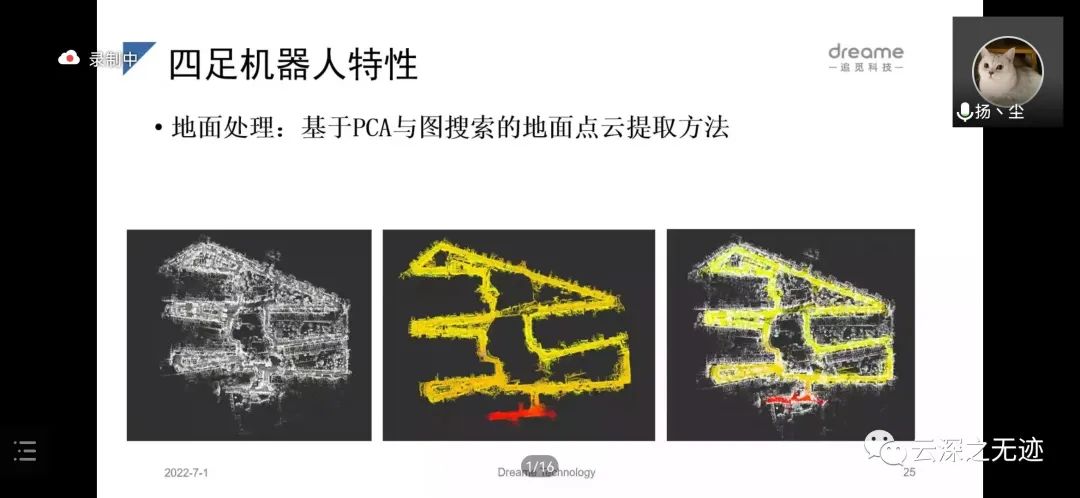
这个是形状处理

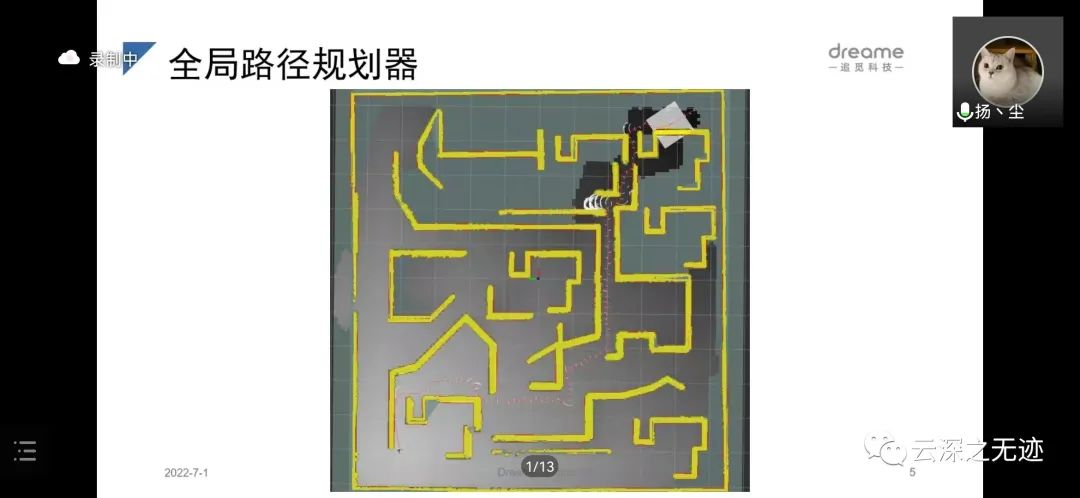
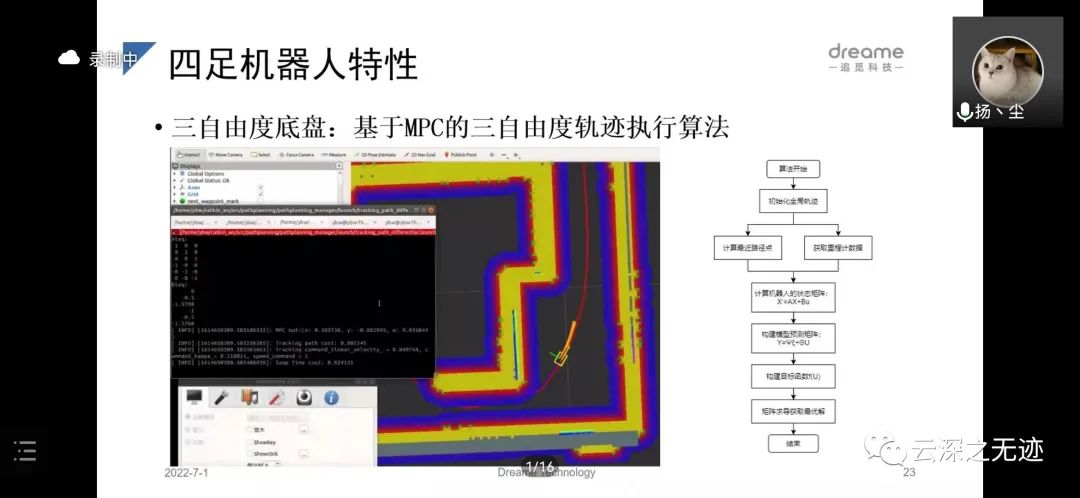
实时规划的案例,ROS好评

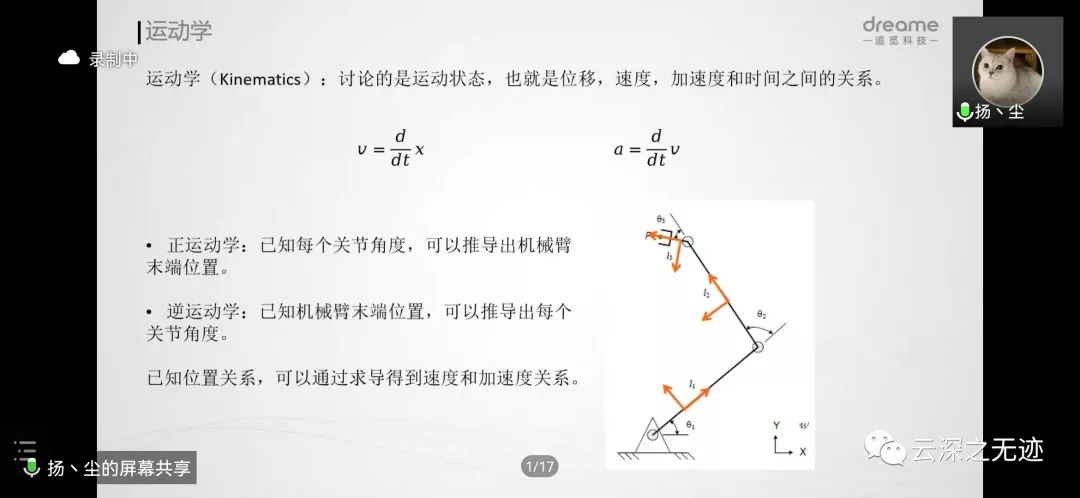
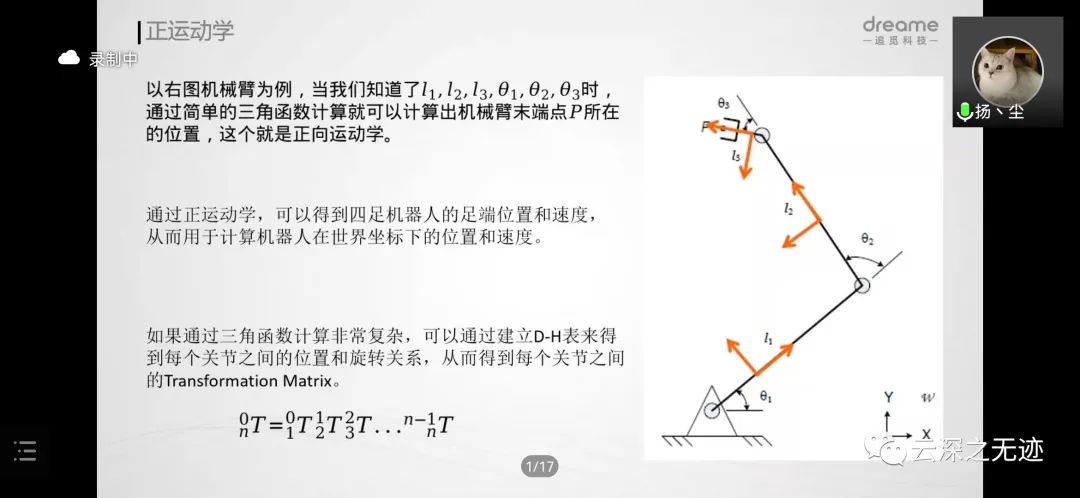
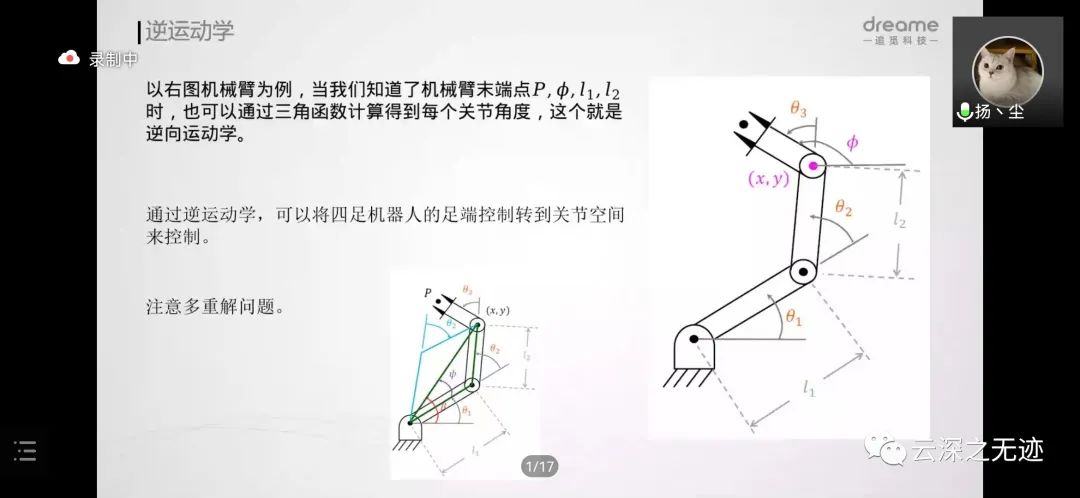
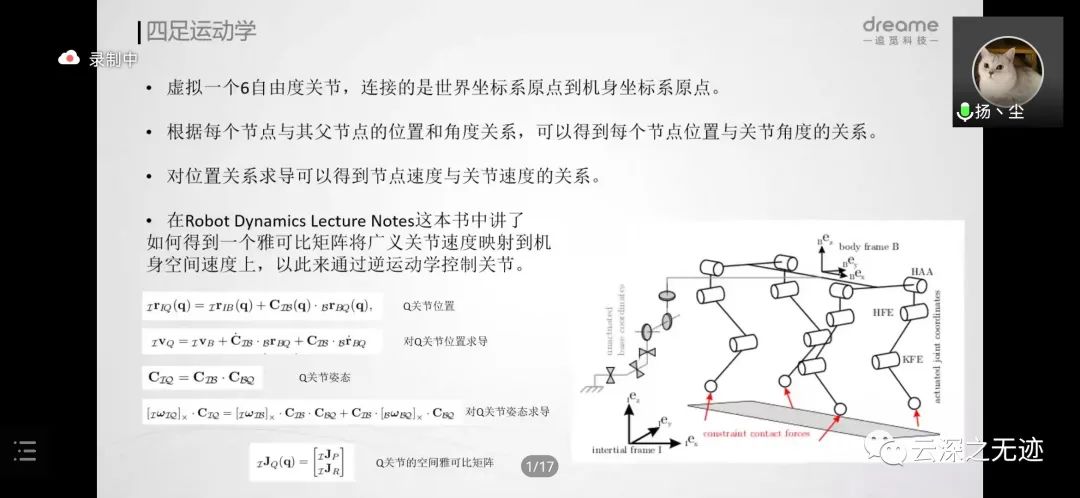
正逆运算的作用
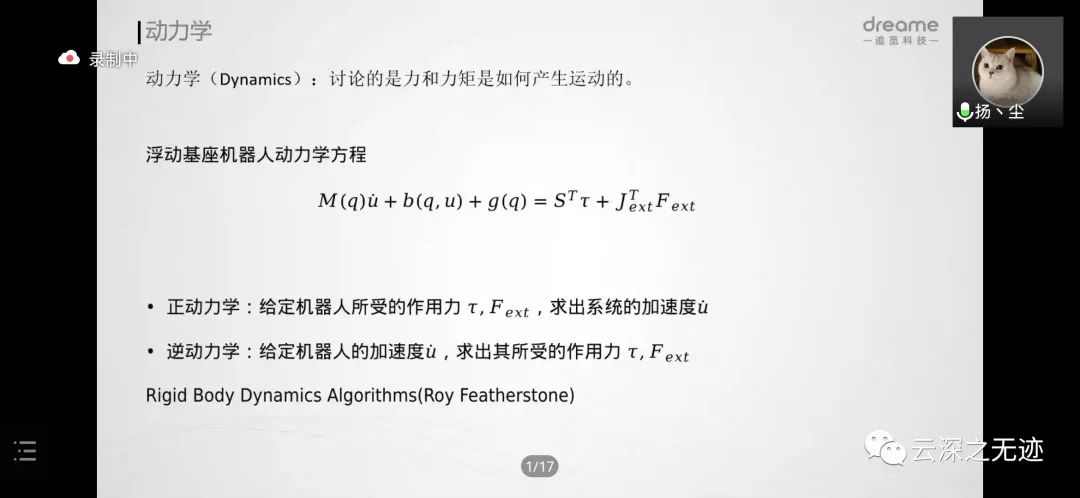
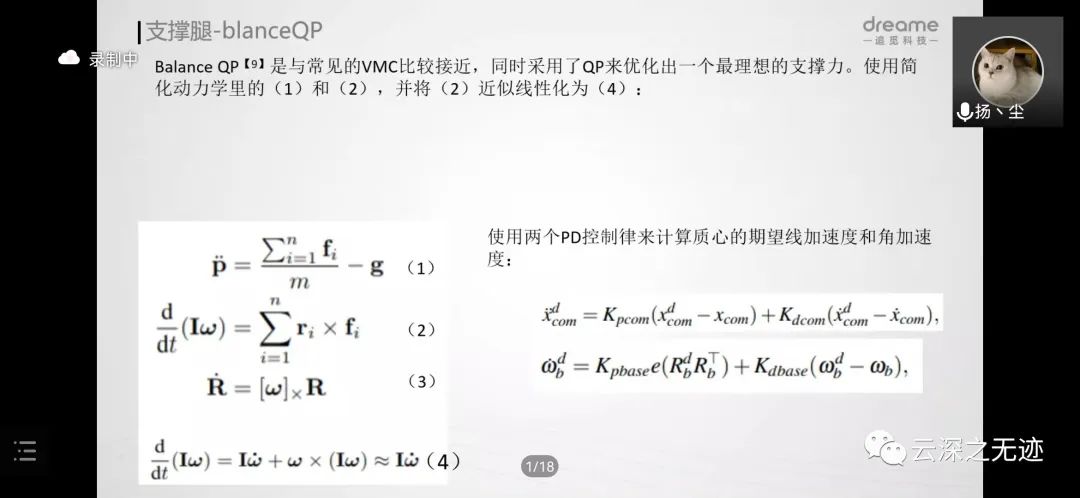
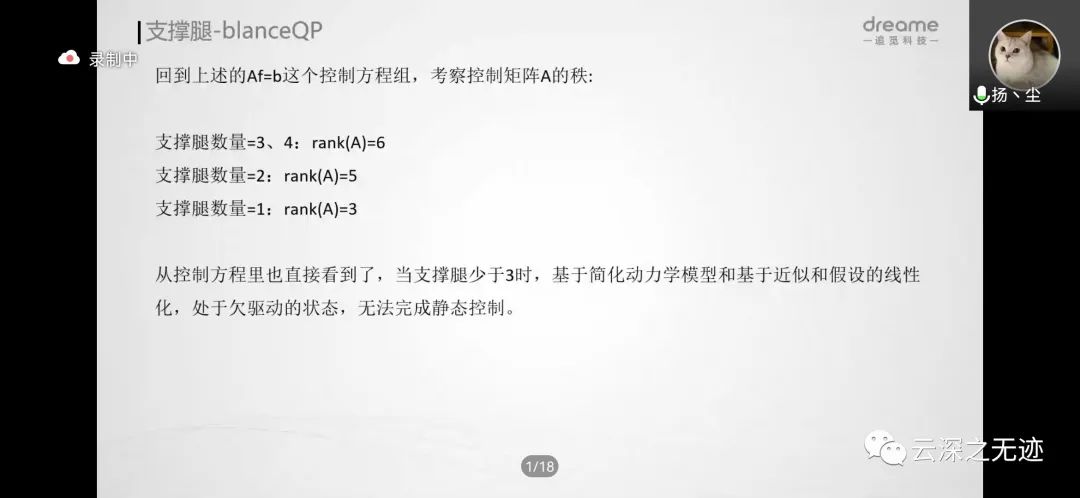
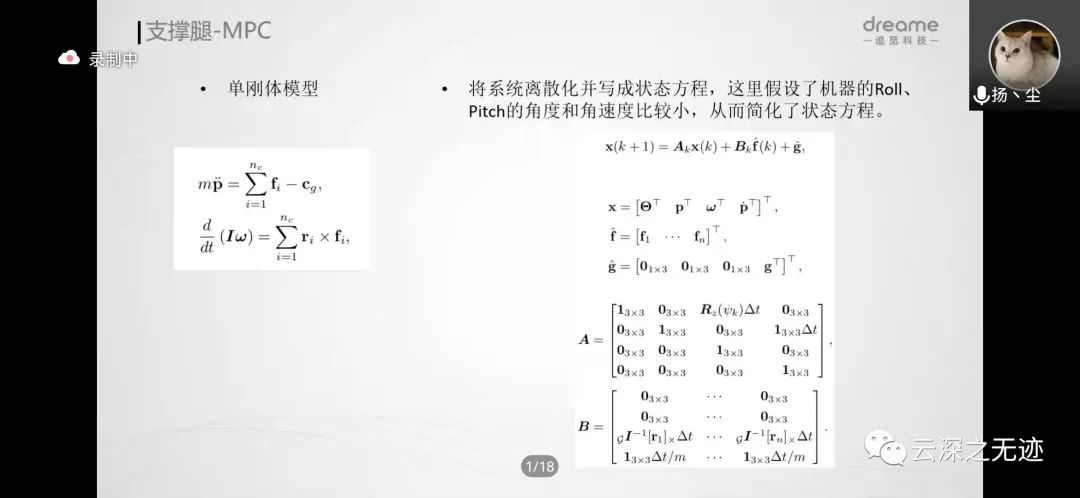
给出一个经典的多足机器人的动力方程
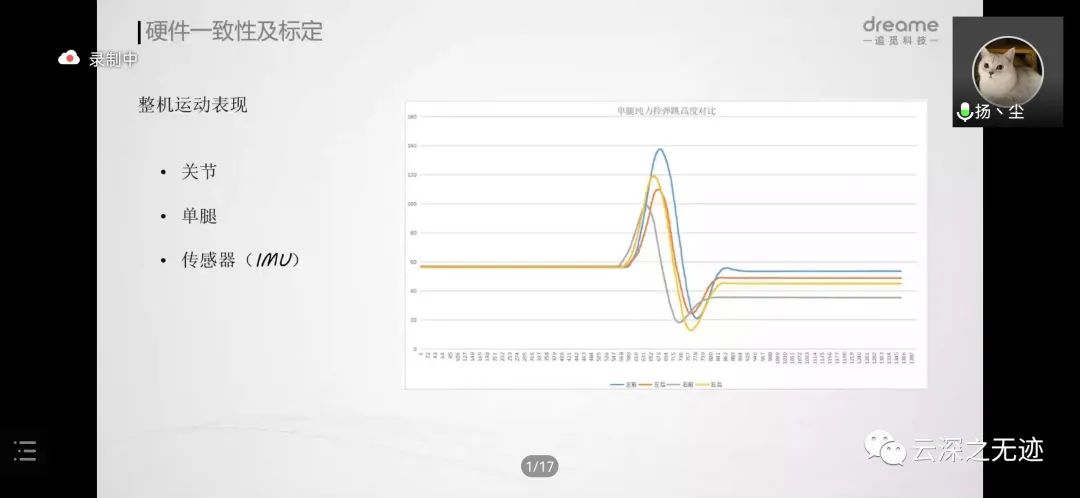
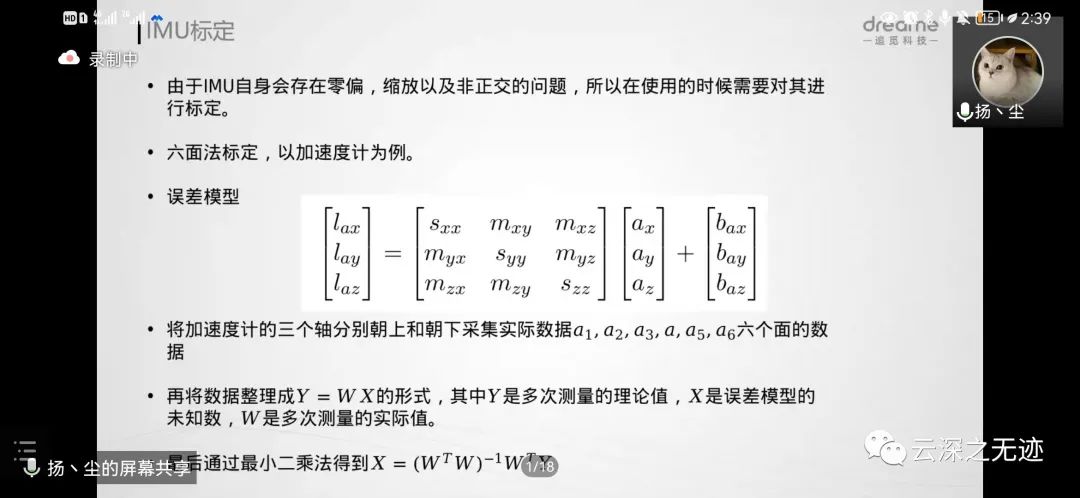
这里是和IMU的性能误差,相关的东西,因为控制器的模型是精确的数学模型,但是输入是不确定的,所以这里进行标定。

这个是我第一次听说




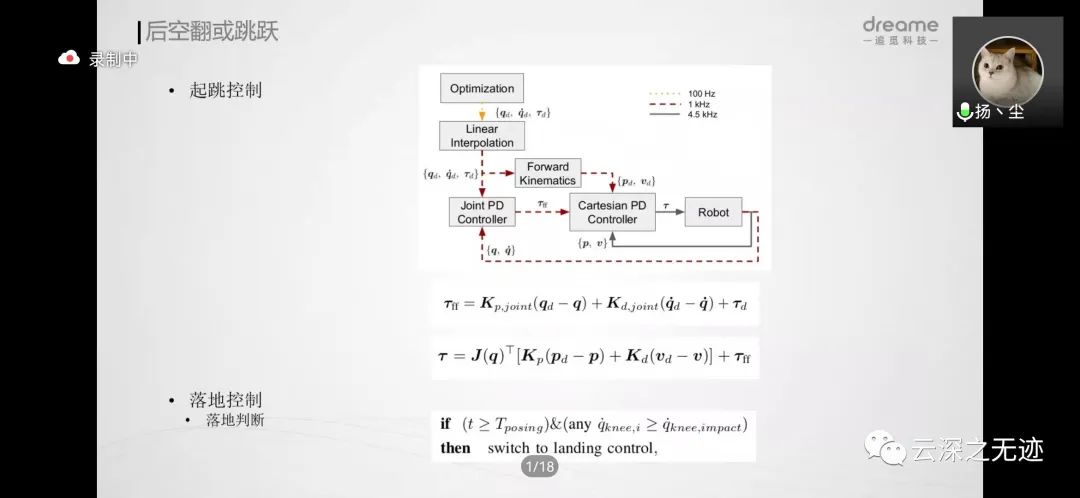
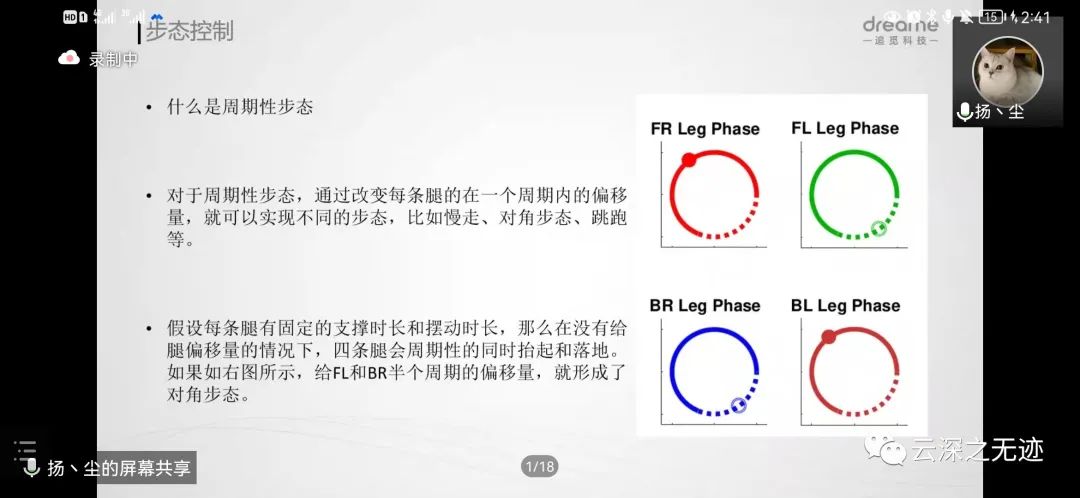
我一直以为是控制器是一套,不会变,今天才知道,复杂的动作都是提前进行离线计算,也就是说,怎么动是提前算好的,时间也是固定的。