来源 | 悦智网
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。

在封闭道路测试中增添虚拟车辆
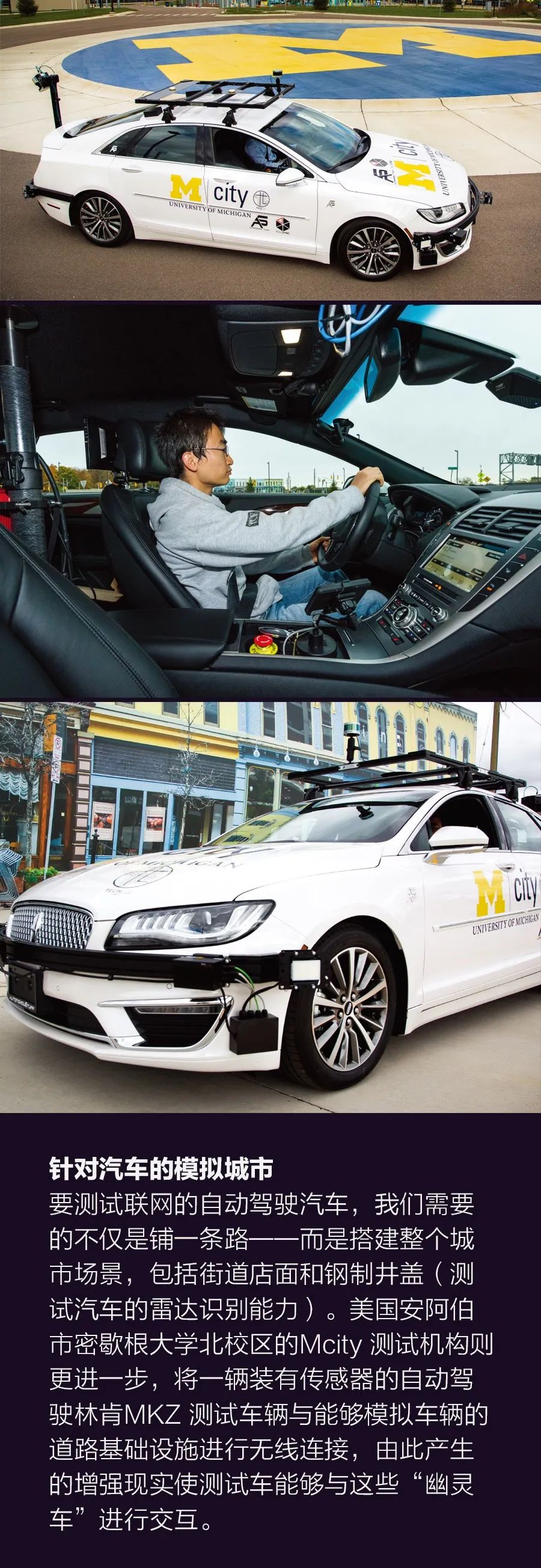
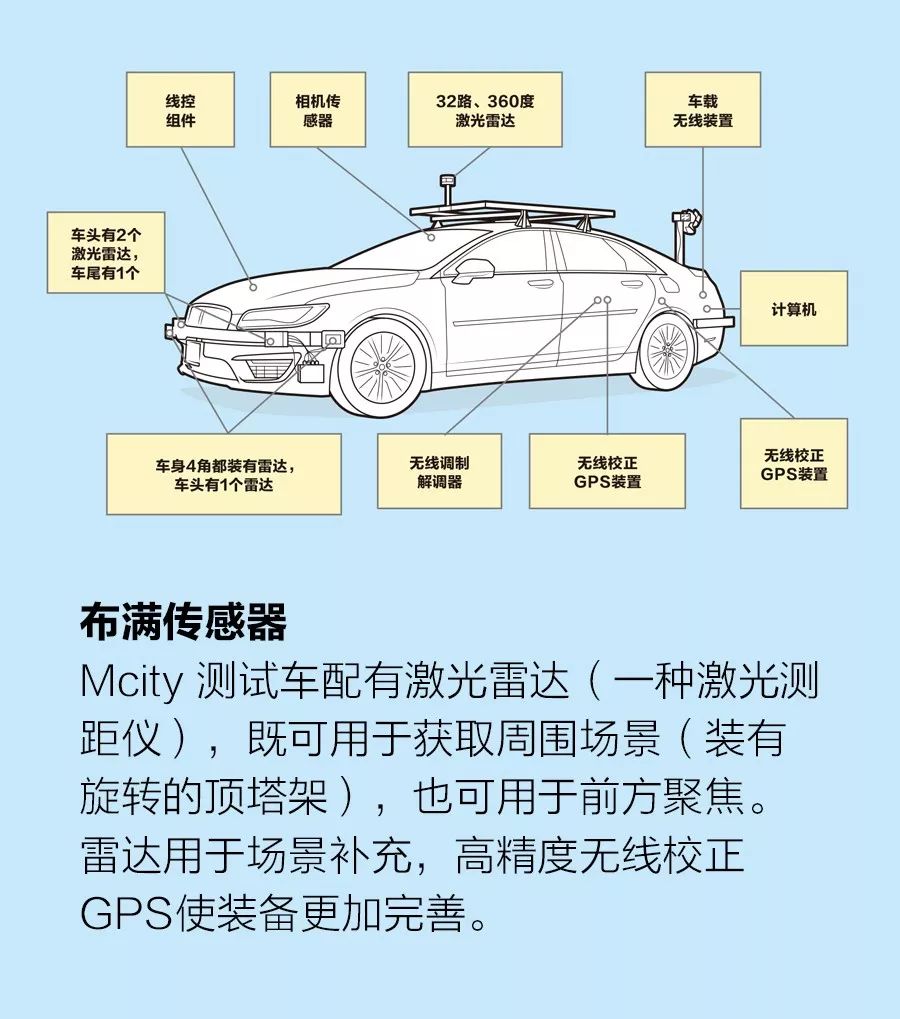
过去几十年来,人们如果想要了解一辆新车的驾驶安全性,就只能采取简单的反复测试方法。这些测试可能包括汽车在四轮贴地的情况下能否急转弯、在短距离内能否刹车制动、与墙面发生冲撞时能否保护车内人员等。而随着自动驾驶汽车的占比越来越大,这种直接的测试已无法满足我们的要求。我们需要了解车辆是否具有足够的智能性来应对人工驾驶时面对的各类驾驶情况。因此,自动驾驶汽车安全保障测试必须转变,少一些类似障碍赛的特质,多一些类似智商测试的特征。测试自动驾驶汽车“脑力”和“体力”的一个主要方法是将其置于有其他交通工具的路况之中。这是一种必要做法,因为在未来许多年内,自动驾驶汽车不得不与人类驾驶汽车共享道路。但是道路测试存在两个主要问题。首先,在部署的初期阶段,无法保证所有相关方的安全性;自动驾驶测试车已经涉及人员伤亡事故。其次,是这些直接测试需要绝对的测试规模。多数情况下,测试车辆会在典型路况下行驶,就像车辆正常行驶一样,只有在极少数情况下,才会出现突发状况。由于这类情况往往很容易超出正常经验边界的范围之外,因此我们称之为边缘案例。例如,一辆卡车丢失了一只轮胎,轮胎滚到路中间,倒在你所在的车道,就在车前方。这种引发并发事故的边缘案例通常很难想象,也很难测试。这就提出了一个问题,一辆自动驾驶的联网汽车进行多长时间的道路测试,才能公正地宣称其是安全的?这个问题的答案可能永远无法揭晓。但是有一点是明确的,那就是我们需要其他策略来评估自动驾驶汽车的安全性。在这里,我们将描述一种实际车辆和计算机仿真相结合的方法,这可能是目前评估自动驾驶汽车安全性最有效的方法。美国国家公路交通安全管理局的统计数据显示,在大约1.6亿公里的驾驶里程中,会发生一次严重的事故,这比从地球到太阳的距离还远一些(是Waymo车队记录里程的10倍,Waymo是谷歌的兄弟公司,拥有最多的自动驾驶汽车经验)。要行驶这么远的距离,一辆自动驾驶汽车需要24小时不间断高速行驶近200年的时间。若在小路上行使,需要通过十字路口停车场附近,则需要花费更长的时间。一个500辆车的车队需要10年才能完成这项测试工作,不仅如此,对每种新设计都必须重新进行一次测试。很显然,汽车行业必须采用其他策略加强道路测试,生成更多的边缘案例。目前采用的一种方法是在封闭的测试设施中,反复呈现已知的边缘案例,来测试自动驾驶汽车。以遇到高速闯红灯的汽车场景为例,需要像电影布景那样建造一个十字路口,自动驾驶汽车在绿灯亮时通过,同时避开前方非法通过的车辆。这种方法虽然很有效,但也存在局限性,通常需要多辆车来模拟边缘案例,还需要专业司机进行驾驶。所有这些都需要大量成本且难以协调。更重要的是,我们无法保证自动驾驶汽车能够按照预期避开事故,特别是在测试的早期阶段。如果出现问题,就会发生真正的撞车事故,导致自动驾驶车辆损坏,甚至会伤害到其他车辆的驾驶人员。最终,无论布景设计师多么精心地设计,都无法建立一个完全真实的交通环境模型。在现实生活中,一片树影都会迷惑自动驾驶汽车的传感器,即便雷达探测到一个井盖,也可能误认为那是一辆不存在的卡车。面对这些物理测试的局限性,计算机仿真可提供一种方法。通过算法生成虚拟车辆,然后在与真实世界道路相匹配的数字地图上移动。由此产生的数据随后传输到行驶在同一条道路的实际车辆上,就像数据来源于车辆的自配传感器一样,车辆准确地解释数据。我们可以把它想象成机器人使用的增强现实。虽然实体测试车辆行驶在空旷的道路上,但其接收到的信号“认为”它被其他车辆包围着。同时,系统会将采集到的信息——包括来自增强现实和对真实世界环境的感知——传回仿真平台。由此,真实车辆、仿真车辆或行人等其他仿真对象能够产生交互作用。通过这种方式,我们能够以安全、经济有效的方式测试多种场景。汽车增强现实的想法源于后门:工程师们已经改进了某些种类的计算机仿真,在其中加入了真实的机器。早在1999年,福特汽车公司就通过测量一个实际的转速发动机来为计算机仿真动力传动系统提供数据。这种混合仿真方法被称为硬件在环,工程师采用这种方法是因为在软件中对引擎进行仿真是非常困难的。了解这段历史后,我们认识到可以采用相反的方法——在测试实际车辆的虚拟环境中生成仿真车辆。2017年6月,我们在全球首个自动驾驶汽车全尺寸测试场——Mcity应用了增强现实环境。该测试场占地32英亩,位于美国安阿伯市密歇根大学北校区。其8车道公里(lane-kilometers)的路面被分成不同的区域,分别具备高速公路、多车道主干道和交叉路口等特征。它的工作方式如下:自动测试车辆配备了车载仪器,能够传输车辆的位置、速度、加速度和行驶方向等状态,每隔1/10秒传输一次。这些仪器采用专用的短程通信标准(DSRC),一种类似于移动用户使用的Wi-Fi的标准。随后,分布在测试设施周边的仪器接收这些信息,并将其转发给一个交通仿真模型,该模型将测试设施等效为包含交通信号的几何网络。计算机模型接收到测试车辆信息后,就会创建一个测试车辆的虚拟副本,然后根据真实测试车辆的运动来更新虚拟车辆的运动。将真实测试车辆的数据输入计算机仿真模型中只构成了回路的一半。通过向测试车辆发送计算机仿真的各种车辆信息,我们来完成回路的另一半,这也是增强现实环境的本质。每一辆仿真车辆都会产生频率为10赫兹的车辆状态信息,我们将这些信息转发给路边设备,这些设备实时广播这些信息。当实体测试车辆接收到这些数据时,车辆控制系统会使用这些数据来“查看”所有虚拟车辆。对汽车来说,这些仿真车辆与实际车辆并没有什么区别。让车辆通过路边设备传递信息——也就是说,用“车辆到基础设施”的连接代替“车辆到车辆”的直接连接,真实车辆和虚拟车辆能够彼此感知并相应地进行交互。同样,真实世界和仿真世界之间的交通信号状态也是同步的。这样一来,真实和虚拟车辆便都可以探测到给定的信号灯并判断是绿色还是红色。在真实世界和仿真世界之间传递的状态信息当然也包括车辆位置,这可将实际车辆映射到仿真道路网络,同时反过来,也可将仿真车辆映射到实体道路网络。实际车辆的位置由GPS坐标(纬度、经度和海拔)表示,仿真车辆由局部坐标系(x、y和z)表示,通过一种算法将一个坐标系转换成另一个坐标系。这个系统需要的不止是这种数学变换。GPS和地图有时会出现一些微小错误,有时会阻止实际测试车辆的GPS位置转换到局部坐标系,使其无法显示在仿真道路上。我们采用了单独的映射算法来纠正这些错误。此外,当测试车辆停止时,我们必须在仿真模型中锁定它的位置,避免其GPS坐标的波动导致测试车辆在仿真模型中出现位置漂移。所有这些都依赖于无线通信。为了确保其可靠性,我们在Mcity安装了4个路边无线通信设备,足以覆盖整个测试设施。在5.9千兆赫波段运行的DSRC无线标准为我们提供了高速率和低延时的数据传输。在高速行驶和紧急停车时,这些对安全性至关重要。DSRC在日本和欧洲广泛使用,但它在美国还没有得到广泛应用,不过凯迪拉克公司目前在一些汽车上安装了DSRC装置。DSRC能否成为汽车之间的通信方式目前还不确定。一些人认为,蜂窝通信,尤其是在即将到来的5G实现中,可能会在更大范围内提供相同的低延迟。无论哪种标准胜出,我们系统使用的通信协议都能轻松地适应。我们认为构建系统的软件框架也能持续使用,至少能再使几年。我们采用PTV Vissim构建了仿真模型,这是一个在德国开发的用于“微观”模拟交通流的商业软件包,也就是说,可以模拟每辆车的运动行为。被测试车辆的变化是可以预测的,其他公司已经开始使用我们的系统来测试他们自已的自动驾驶车辆。目前,我们的一辆测试车辆是林肯MKZ混合动力车,配有DSRC装置,实现了完全连接。我们为车辆增配的线控装置能够通过软件控制方向盘、油门、刹车和变速器。此外,测试车辆还装配了多个雷达、激光雷达、照相机和一个可实时进行运动定位的GPS接收器,可参考来自地面无线信号来提高分辨率。我们已经实现了两个测试场景。在第一个场景中,系统生成一列虚拟火车,并将其投射到测试车辆所感知的增强现实环境中,虚拟火车驶向Mcity的一个铁路道口模型。该场景的目的是观察测试车辆是否能及时停车,并等待火车通过。我们还添加了其他虚拟交通车辆,如测试车辆后方的汽车。这串车辆——实际车辆和虚拟车辆——可以被布置为护航车队(称为车组)或自主排队进入岔路。第二个更复杂的测试场景涉及我们前面提到的情景——闯红灯路况。美国汽车协会数据显示,在美国,有1/4以上的十字路口严重事故是由闯红灯造成的。设置这个场景有两个目的:观察测试车辆对交通信号的反应及其对闯红灯违法者的反应。我们的测试车辆应能够分辨信号灯是红色还是绿色,决定是停下还是继续行驶。还要注意到出现了闯红灯的虚拟车辆、预测它的轨迹,并计算通过该路段的测试车辆在何时何地与其轨迹交叉。测试车辆若能够完成所有这些任务,就可避免发生碰撞。由于运行仿真模型的计算机能够完全控制闯红灯虚拟车辆的动作,因此可以在连续地迭代试验中生成各种各样的测试参数。这也正是计算机比人类驾驶员做得更精确的一点。不仅如此,整个试验可以在完全安全的情况下进行,因为交通违法者只是一辆虚拟汽车。我们还可以实现多种类似的边缘案例。例如,我们可以使用增强现实环境来评估测试车辆处理复杂驾驶情况的能力,例如从一个停车标志左拐到一条主路上等。车辆需要寻找来往两个方向的交通空隙,同时留意可能会在标志处横穿马路的行人。汽车可以决定先在中间路段停车,也可以直接驶入预定车道。这涉及几个阶段的决策过程,需要全面考虑到其他车辆的动作(包括预测它们将对测试车做出何种反应)。另一个例子是在没有交通信号帮助的情况下,测试车辆在环岛路况的行驶情况——进出环岛以及与其他车辆协商位置。在这一场景中,测试车辆需要预测其他车辆的动作,决定可进入的距离间隔进而进入场景,还要注意可能抢行的车辆。我们还可以将骑自行车的人、行人和其他道路使用者(如农用机械)添加到增强现实场景中。选择的角色越难预测,就越需要自动驾驶汽车拥有更高的智能。最后,我们希望构建一个包含边界案例的大型测试场景库,然后使用增强现实测试环境反复运行测试。目前,我们正在建立这样的一个数据库,其中包括从实际车祸报告中搜集的数据,以及装配传感器车辆观察到的人们在不知道自己是试验对象的情况下是如何驾驶的。通过将不同的边界条件整合在一起,我们希望建立对自动驾驶汽车中运行软件具有特别挑战性的人工边界案例库。有了这些装备,我们将能够判断指定自动驾驶汽车的安全程度,而不必把它开到太阳再开回来。- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!