

无限冲激响应(IIR:Infinite Impulse Response)是一种适用于许多线性时不变系统的属性,这些系统的特征是具有一个冲激响应h(t),该冲激响应h(t)不会在特定点上完全变为零,而是无限期地持续。这与有限冲激响应(FIR:Finite Impulse Response)系统形成对比,在有限冲激响应(FIR)系统中,对于某个有限T,在时间t> T时,冲激响应确实恰好变为零。线性时不变系统的常见示例是大多数电子和数字滤波器。具有此属性的系统称为IIR系统或IIR滤波器。对于什么叫冲激响应,这里就不展开解释了,有兴趣的可以查阅相关书籍。
 这是常见的教科书式数学严谨定义,很多人看到这一下就蒙了,能说人话吗?
这是常见的教科书式数学严谨定义,很多人看到这一下就蒙了,能说人话吗?
线性时不变系统理论俗称LTI系统理论,源自应用数学,直接在核磁共振频谱学、地震学、电路、信号处理和控制理论等技术领域运用。它研究的是线性、非时变系统对任意输入信号的响应。虽然这些系统的轨迹通常会随时间变化(例如声学波形)来测量和跟踪,但是应用到图像处理和场论时,LTI系统在空间维度上也有轨迹。因此,这些系统也被称为线性非时变平移,在最一般的范围理论给出此理论。在离散(即采样)系统中对应的术语是线性非时变平移系统。由电阻、电容、电感组成的电路是LTI系统的一个很好的例子。比如一个运放系统在一定频带范围内满足信号的时域叠加,输入一个100Hz和200Hz正弦信号,输出频率是这两种信号的线性叠加。
用数学对LTI系统描述:
线性:输入x1(t),产生响应 y1(t),而输入x2(t),产生相应y2(t) , 那么放缩和加和输入 ax1(t)+bx1(t), 产生放缩、加和的响应ay1(t)+by1(t),其中a和b是标量,对于任意的有:
输入

产生响应为:

时不变性:指如果将系统的输入信号延迟δ秒,那么得到的输出响应也相应延时δ秒。用数学描述,也即如果输入x1(t),产生响应y1(t) ,而输入x1(t+δ) ,产生响应 y1(t+δ)。
这么描述还是不易懂,来个图,有图有真相:

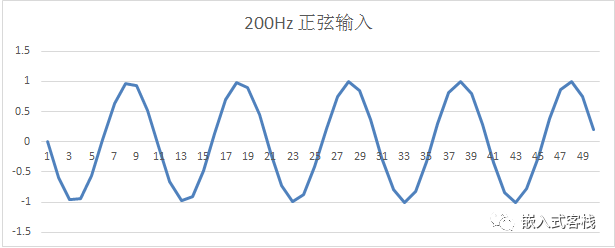
假定一个信号放大电路对100Hz正弦信号放大2倍,则输出为:

而对200Hz的正弦信号,假定其放大倍数为1.7倍。(做过运放电路设计的朋友应该有经验,在其同频带其放大倍数往往并不平坦,也即幅频响应在频带内不平坦,这是比较常见的)。也即输入为:
 则响应为:
则响应为:

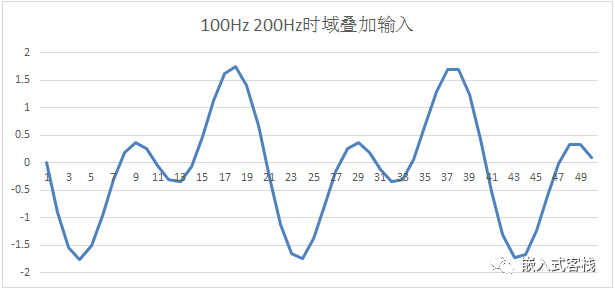
那么如果输入100Hz和200Hz的时域叠加信号,则其输入为:
 则其响应为:
则其响应为:
 由这些图可看出,输入信号的形状保持不变,输出为对应输入的线性时域叠加。对于时不变,就不用图描述了,在一个真实电路中,如果输入延迟一定时间,则响应对应延迟相同时间输出。
由这些图可看出,输入信号的形状保持不变,输出为对应输入的线性时域叠加。对于时不变,就不用图描述了,在一个真实电路中,如果输入延迟一定时间,则响应对应延迟相同时间输出。
上面这么多文字只是为了描述在什么场合可以使用IIR滤波器对信号进行数字滤波。总结而言,就是在线性时不变系统中适用。换言之,在大多数电路系统中我们都可以尝试采用IIR滤波器进行数字滤波。
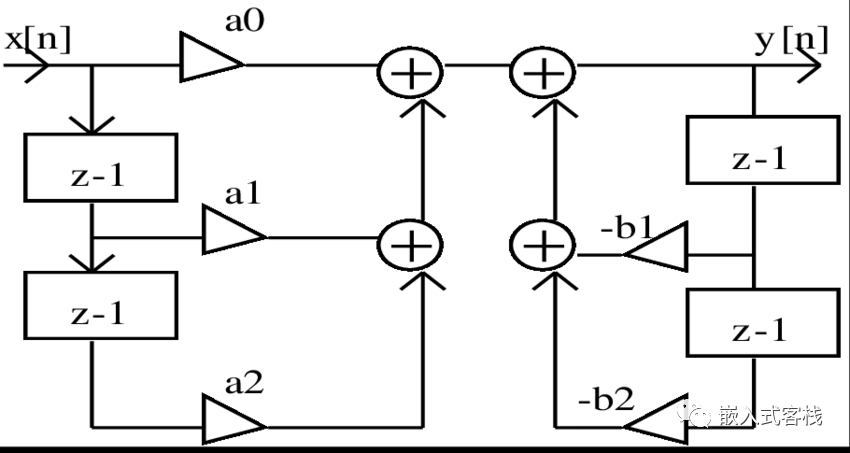
那么究竟什么是IIR滤波器呢?从数字信号处理的书籍中我们能看到这样的Z变换信号流图:

在时域中对于上述流图,用时域描述即为:

如果熟悉Z变换,则Z变换传递函数为:

上述数字滤波器,如果从编程的角度来看,x(n-1),表示上一次的信号,可能是来自ADC的上次采样,而y(n-1)则为上一次滤波器的输出值,对应就比较好理解x(n-N)就表示前第n次输入样本信号,而y(n-M)则为前第M次滤波器的输出。
说了这么多,只是为了更好的理解概念,只有概念理解正确,才能使用正确。概念理解这对工程师而言,非常之重要。
MATLAB提供了非常容易使用的FDATool帮助我们设计数字滤波器,真正精彩的地方开始了,让我们拭目以待究竟如何一步一步设计并实施一个IIR滤波器。首先打开MATLAB,在命令行中敲fdatool,然后敲回车

弹出窗体就是fdatool了,如下:

A(V)(dB)=20lg(Vo/Vi);电压增益,Vo 为输出电压,Vi为输入电压
A(I)(dB)=20lg(Io/Ii);电流增益,Io 为输出电流,Ii为输入电流
A(p)(dB)=10lg(Po/Pi);功率增益,Po 为输出功率,Pi为输入功率
滤波器类型:这里有Butterworth(巴特沃斯)、Chebyshev Type I,Chebyshev Type II、(切比雪夫)、Elipic 等可选。

巴特沃斯 Butterworth,也被称作最大平坦滤波器。巴特沃斯滤波器的特点是通频带内的频率响应曲线最大限度平坦,没有纹波。
切比雪夫 Chebyshev,是在通带或阻带上频率响应幅度等波纹波动的滤波器。切比雪夫滤波器在过渡带比巴特沃斯滤波器的衰减快,但频率响应的幅频特性不如后者平坦。
椭圆 Elliptic,椭圆滤波器是在通带和阻带等波纹的一种滤波器。
…这里就不一一介绍了,有兴趣可以去查信号处理书籍。
就其特点,这里对其中几种略作介绍:
巴特沃斯具有最平坦的通带。
椭圆滤波器衰减最快,但是通带、阻带都有波纹。
切比雪夫滤波器衰减比巴特沃斯快,但比椭圆滤波器慢,波纹区域可选择。
假设我们需要设计一个IIR滤波器,采样率为32000Hz, 有用信号频率在10000Hz内,设计IIR滤波器对信号进行数字滤波。这里为节省算力,我们指定滤波器的阶数,也即传递函数中N/M中的最大值,一般而言N大于M。
这里指定阶数为8阶,类型指定为巴特沃斯型IIR滤波器,输入阶数8阶,采样率32000Hz,然后点击Design Filter如下图所示:

其相频响应曲线如下:

除此之外,我们还可以将幅频与相频曲线放在一个频率坐标上去看设计结果:

导出滤波器参数,这里我们选择,
然后就得到了一个文件,保存2KHz_LPF.fcf,文件名随你喜欢。
文件内容如下:
% Generated by MATLAB(R) 8.4 and the Signal Processing Toolbox 6.22.
% Generated on: 27-Mar-2020 21:27:06
% Coefficient Format: Decimal
% Discrete-Time IIR Filter (real)
% -------------------------------
% Filter Structure : Direct-Form II, Second-Order Sections
% Number of Sections : 4
% Stable : Yes
% Linear Phase : No
SOS Matrix:
1 2 1 1 -1.7193929141691948 0.8610574795347461
1 2 1 1 -1.5237898734101736 0.64933827386370635
1 2 1 1 -1.4017399331200424 0.51723237044751591
1 2 1 1 -1.3435020629061745 0.45419615396638446
Scale Values:
0.035416141341387819
0.031387100113383172
0.028873109331868367
0.027673522765052503
至此设计工作就结束了,马上进入滤波器的部署测试阶段。
这里有个概念需要略作解释:什么叫直接II型 SOS
所谓直接II型,SOS(second order section)理解很简单,本质是将IIR Z传递函数分解为上述二阶块的级联形式。
到这里,没有经验的朋友可能会说,这么一堆参数我该咋用呢?
需要自己去写前面描述的计算公式吗?当然你也可以这么做,这里就不写了,ARM的CMSIS库已经帮大家设计好了种类繁多的数字信号处理函数实现了,而且经过了测试,这里直接拿来用即可。有兴趣自己写也不难,只要理解Z传递函数概念内涵,非常容易实现。这里我们采用32位浮点实现函数:
arm_biquad_cascade_df1_f32。该函数位于:
CMSIS\DSP\Source\FilteringFunctions\arm_biquad_cascade_df1_init_f32.c
CMSIS\DSP\Source\FilteringFunctions\arm_biquad_cascade_df1_f32.c
我们来看一看这个函数:
arm_biquad_cascade_df1_init_f32.c:
/*
*作用 :初始化滤波器
*S :指向浮点SOS级联结构的实例。
*numStages:滤波器中二阶SOS的数量
*pCoeffs :滤波器参数指针,参数按下列顺序存储
* {b10, b11, b12, a11, a12, b20, b21, b22, a21, a22, ...}
*pState :历史状态缓冲区指针
*/
void arm_biquad_cascade_df1_init_f32(
arm_biquad_casd_df1_inst_f32 * S,
uint8_t numStages,
const float32_t * pCoeffs,
float32_t * pState)
{
/* Assign filter stages */
S->numStages = numStages;
/* Assign coefficient pointer */
S->pCoeffs = pCoeffs;
/* Clear state buffer and size is always 4 * numStages */
memset(pState, 0, (4U * (uint32_t) numStages) * sizeof(float32_t));
/* Assign state pointer */
S->pState = pState;
}
arm_math.h 定义了须用到的结构体,对于本例相关的结构体为arm_biquad_casd_df1_inst_f32
typedef struct
{
unsigned int numStages; /*2阶节的个数,应为2*numStages. */
float *pState; /*状态系数数组指针,数组长度为4*numStages*/
float *pCoeffs; /*系数数组指针, 数组的长度为5*numStages.*/
} arm_biquad_casd_df1_inst_f32;
滤波器具体滤波函数为:
arm_biquad_cascade_df1_f32
/**
* *S :指向浮点Biquad级联结构的实例.
* *pSrc :指向输入数据块。
* *pDst :指向输出数据块。
* blockSize:每次调用要处理的样本数。
* 返回值 :无.
*/
void arm_biquad_cascade_df1_f32(
const arm_biquad_casd_df1_inst_f32 * S,
float * pSrc,
float * pDst,
unsigned int blockSize)
{
float *pIn = pSrc; /*源指针 */
float *pOut = pDst; /*目的指针 */
float *pState = S->pState; /*状态指针 */
float *pCoeffs = S->pCoeffs; /*参数指针 */
float acc; /*累加器 */
float b0, b1, b2, a1, a2; /*滤波器参数 */
float Xn1, Xn2, Yn1, Yn2; /*滤波器状态变量*/
float Xn; /*临时输入 */
unsigned int sample, stage = S->numStages; /*循环计数 */
do
{
/* Reading the coefficients */
b0 = *pCoeffs++;
b1 = *pCoeffs++;
b2 = *pCoeffs++;
a1 = *pCoeffs++;
a2 = *pCoeffs++;
Xn1 = pState[0];
Xn2 = pState[1];
Yn1 = pState[2];
Yn2 = pState[3];
sample = blockSize >> 2u;
while(sample > 0u)
{
/* 读第一个输入 */
Xn = *pIn++;
/* acc = b0 * x[n] + b1 * x[n-1] + b2 * x[n-2] + a1 * y[n-1] + a2 * y[n-2] */
Yn2 = (b0 * Xn) + (b1 * Xn1) + (b2 * Xn2) + (a1 * Yn1) + (a2 * Yn2);
/* Store the result in the accumulator in the destination buffer. */
*pOut++ = Yn2;
/* 每次计算输出后,状态都应更新. */
/* 状态应更新为: */
/* Xn2 = Xn1 */
/* Xn1 = Xn */
/* Yn2 = Yn1 */
/* Yn1 = acc */
/* Read the second input */
Xn2 = *pIn++;
/* acc = b0 * x[n] + b1 * x[n-1] + b2 * x[n-2] + a1 * y[n-1] + a2 * y[n-2] */
Yn1 = (b0 * Xn2) + (b1 * Xn) + (b2 * Xn1) + (a1 * Yn2) + (a2 * Yn1);
/* 将结果存储在目标缓冲区的累加器中. */
*pOut++ = Yn1;
/* 每次计算输出后,状态都应更新. */
/* 状态应更新为: */
/* Xn2 = Xn1 */
/* Xn1 = Xn */
/* Yn2 = Yn1 */
/* Yn1 = acc */
/*读第三个输入 */
Xn1 = *pIn++;
/* acc = b0 * x[n] + b1 * x[n-1] + b2 * x[n-2] + a1 * y[n-1] + a2 * y[n-2] */
Yn2 = (b0 * Xn1) + (b1 * Xn2) + (b2 * Xn) + (a1 * Yn1) + (a2 * Yn2);
/* 将结果存储在目标缓冲区的累加器中. */
*pOut++ = Yn2;
/* 每次计算输出后,状态都应更新. */
/* 状态应更新为: */
/* Xn2 = Xn1 */
/* Xn1 = Xn */
/* Yn2 = Yn1 */
/* Yn1 = acc */
/* 读第四个输入 */
Xn = *pIn++;
/* acc = b0 * x[n] + b1 * x[n-1] + b2 * x[n-2] + a1 * y[n-1] + a2 * y[n-2] */
Yn1 = (b0 * Xn) + (b1 * Xn1) + (b2 * Xn2) + (a1 * Yn2) + (a2 * Yn1);
/* 将结果存储在目标缓冲区的累加器中. */
*pOut++ = Yn1;
/* 每次计算输出后,状态都应更新. */
/* 状态应更新为: */
/* Xn2 = Xn1 */
/* Xn1 = Xn */
/* Yn2 = Yn1 */
/* Yn1 = acc */
Xn2 = Xn1;
Xn1 = Xn;
/* 递减循环计数器 */
sample--;
}
/* 如果blockSize不是4的倍数,
*请在此处计算任何剩余的输出样本。
*不使用循环展开. */
sample = blockSize & 0x3u;
while(sample > 0u)
{
/* 读取输入 */
Xn = *pIn++;
/* acc = b0 * x[n] + b1 * x[n-1] + b2 * x[n-2] + a1 * y[n-1] + a2 * y[n-2] */
acc = (b0 * Xn) + (b1 * Xn1) + (b2 * Xn2) + (a1 * Yn1) + (a2 * Yn2);
/* 将结果存储在目标缓冲区的累加器中. */
*pOut++ = acc;
/* 每次计算输出后,状态都应更新。 */
/* 状态应更新为: */
/* Xn2 = Xn1 */
/* Xn1 = Xn */
/* Yn2 = Yn1 */
/* Yn1 = acc */
Xn2 = Xn1;
Xn1 = Xn;
Yn2 = Yn1;
Yn1 = acc;
/* d递减循环计数器 */
sample--;
}
/* 将更新后的状态变量存储回pState数组中 */
*pState++ = Xn1;
*pState++ = Xn2;
*pState++ = Yn1;
*pState++ = Yn2;
/*第一阶段从输入缓冲区到输出缓冲区. */
/*随后的numStages在输出缓冲区中就地发生*/
pIn = pDst;
/* 重置输出指针 */
pOut = pDst;
/* 递减循环计数器 */
stage--;
} while(stage > 0u);
}
开始测试:
#include <stdio.h>
#include <math.h>
/*
SOS Matrix:
1 2 1 1 -1.7193929141691948 0.8610574795347461
1 2 1 1 -1.5237898734101736 0.64933827386370635
1 2 1 1 -1.4017399331200424 0.51723237044751591
1 2 1 1 -1.3435020629061745 0.45419615396638446
Scale Values:
0.035416141341387819
0.031387100113383172
0.028873109331868367
0.027673522765052503
做如下转换:
1.缩放
[1 2 1] * 0.035416141341387819
[1 2 1] * 0.031387100113383172
[1 2 1] * 0.028873109331868367
[1 2 1] * 0.027673522765052503
得到:
[0.035416141341387819 2*0.035416141341387819 0.035416141341387819]
[0.031387100113383172 2*0.031387100113383172 0.031387100113383172]
[0.028873109331868367 2*0.028873109331868367 0.028873109331868367]
[0.027673522765052503 2*0.027673522765052503 0.027673522765052503]
2.舍掉第四列参数
3.将后两列分别乘以-1,即:
0.035416141341387819 2*0.035416141341387819 0.035416141341387819 -1.7193929141691948 0.8610574795347461
0.031387100113383172 2*0.031387100113383172 0.031387100113383172 -1.5237898734101736 0.64933827386370635
0.028873109331868367 2*0.028873109331868367 0.028873109331868367 -1.4017399331200424 0.51723237044751591
0.027673522765052503 2*0.027673522765052503 0.027673522765052503 -1.3435020629061745 0.45419615396638446
这样就得到了滤波器系数组了
*/
#define IIR_SECTION 4 /*见前面设计输出为4个SOS块*/
static float iir_state[4*IIR_SECTION];/*历史状态缓冲区 */
const float iir_coeffs[5*IIR_SECTION]={
0.035416141341387819,2*0.035416141341387819,0.035416141341387819,1.7193929141691948,-0.8610574795347461, 0.031387100113383172,2*0.031387100113383172,0.031387100113383172,1.5237898734101736,-0.64933827386370635, 0.028873109331868367,2*0.028873109331868367,0.028873109331868367,1.4017399331200424,-0.51723237044751591, 0.027673522765052503,2*0.027673522765052503,0.027673522765052503,1.3435020629061745,-0.45419615396638446
};
static arm_biquad_casd_df1_inst_f32 S;
/*假定采样512个点*/
#define BUF_SIZE 512
#define PI 3.1415926
#define SAMPLE_RATE 32000 /*32000Hz*/
int main()
{
float raw[BUF_SIZE];
float raw_4k[BUF_SIZE];
float raw_out[BUF_SIZE];
float raw_noise[BUF_SIZE];
float raw_noise_out[BUF_SIZE];
arm_biquad_casd_df1_inst_f32 S;
FILE *pFile=fopen("./simulation.csv","wt+");
if(pFile==NULL)
{
printf("file opened failed");
return -1;
}
for(int i=0;i<BUF_SIZE;i++)
{
/*模拟800Hz正弦幅度171,叠加幅度50随机噪声 */
raw[i] = 0.5*1024.0/3*sin(2*PI*800*i/32000.0f)+rand()%50;
raw_4k[i] = 0.5*1024.0/3*sin(2*PI*4000*i/32000.0f);
/*模拟800Hz +4000Hz+随机噪声叠加输入 */
raw_noise[i] = raw[i] + raw_4k[i];
}
/*初始化滤波器,以及滤波*/
arm_biquad_cascade_df1_init_f32(&S, IIR_SECTION, (float *)&iir_coeffs[0], (float *)&iir_state[0]);
arm_biquad_cascade_df1_f32(&S, raw, raw_out, BUF_SIZE);
for(int i=0;i<BUF_SIZE;i++)
{
fprintf(pFile,"%f,",raw[i]);
}
fprintf(pFile,"\n");
for(int i=0;i<BUF_SIZE;i++)
{
fprintf(pFile,"%f,",raw_4k[i]);
}
fprintf(pFile,"\n");
for(int i=0;i<BUF_SIZE;i++)
{
fprintf(pFile,"%f,",raw_out[i]);
}
/*初始化滤波器,以及滤波*/
arm_biquad_cascade_df1_init_f32(&S, IIR_SECTION, (float *)&iir_coeffs[0], (float *)&iir_state[0]);
arm_biquad_cascade_df1_f32(&S, raw_noise, raw_noise_out, BUF_SIZE);
fprintf(pFile,"\n");
for(int i=0;i<BUF_SIZE;i++)
{
fprintf(pFile,"%f,",raw_noise[i]);
}
fprintf(pFile,"\n");
for(int i=0;i<BUF_SIZE;i++)
{
fprintf(pFile,"%f,",raw_noise_out[i]);
}
fclose(pFile);
return 0;
}
利用csv文件,将模拟数据存储,直接用excel打开,将行数据生成曲线图如下:
有兴趣也可以写个界面直接显示,甚至绘制出谱线图,做进一步分析。
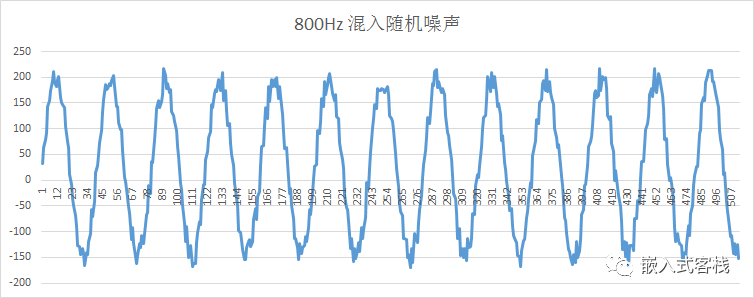


第一幅图,为800Hz信号混入随机噪声的波形
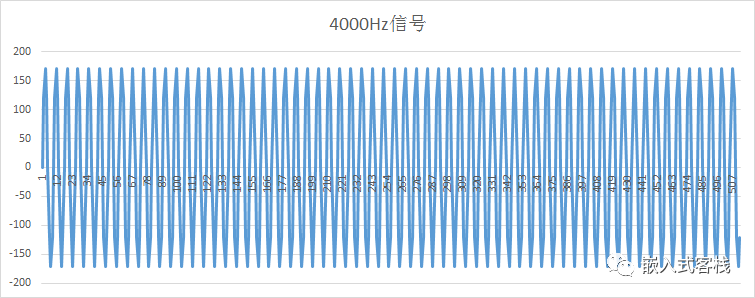
第二幅图,为4000Hz信号,对假定系统为无用干扰信号
第三幅图, 为800Hz 混入随机噪声过滤后,已经很好的还原有用信号频率
第四幅图, 为800Hz信号混入随机噪声,同时叠加4000Hz干扰的波形,对系统而言,从时域中,明显可见,有用信号已经完全扭曲
第五幅图,为800Hz信号混入随机噪声,同时叠加4000Hz干扰的输入,经过该低通滤波器后的波形,与第三幅图基本一样,已经非常好的滤除了干扰信号。
总结:
IIR滤波器在线性时不变系统中可以很好的解决工程中一般噪声问题
如果需要设计带通、高通滤波器其步骤基本类似,只是滤波器的参数以及SOS块个数可能不一样而已
需要提醒的时,IIR的相频响应不线性,如果系统对相频响应有严格要求,就需要采用其他的数字滤波器拓扑形式了
实际应用中,如果阶数不高时,现在算力强劲的单片机或者DSP以及可以直接使用浮点处理。
如果对处理速度有严格的实时要求,需要在极短时间进行滤波处理,可以考虑降低阶数,或采用定点IIR滤波算法实现。也或者将文中函数进行汇编级优化。
最近开的号,没有留言功能,设置了小程序留言功能,欢迎点下面进行留言讨论。
点击留言/查看留言
—END—
