下午正在研究Ubuntu上截图的时候,群里面有人dd我,让我看发布会,除了罗胖讲段子和看英伟达的PPT好看,别的发布会还没有怎么上过心。不管怎么说,去看看!

另一位学姐发的海报,截取一部分
另外,浪费时间看了发布会,怎么会不记录一下
因为使用的是电脑看的,截图不方便,后面也找不到关于发布会的PPT。
店大欺人,气死了,根本不搭理你

因为我看的时候应该是已经是发布了一会儿了 , 正好看到博士在说自己的旭日x3派,猜测是树莓派的A53核心。因为它说的数据太离谱了,但是他还开源了,至于为什么,可以到后面看看。
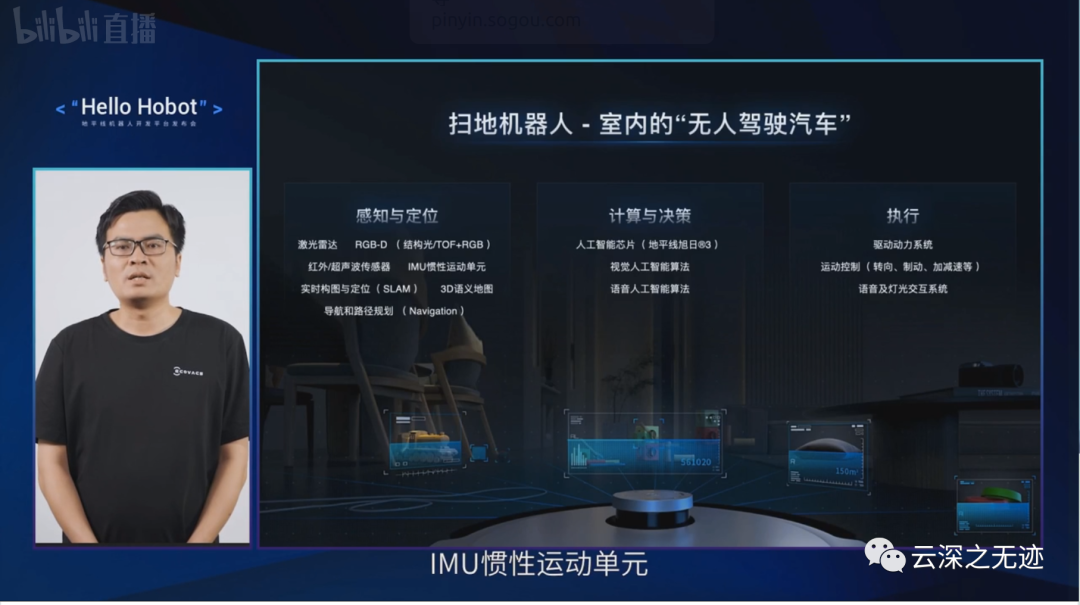
因为机器人这个东西,独有脑子还不行,还得眼睛,驱动器。地平线作为一家方案的提供商,这个发布会的下半段给了应用它的厂商,科沃斯。主要是讲了一下出的扫地机器人。。。这个扫地机器人真的这么火吗?
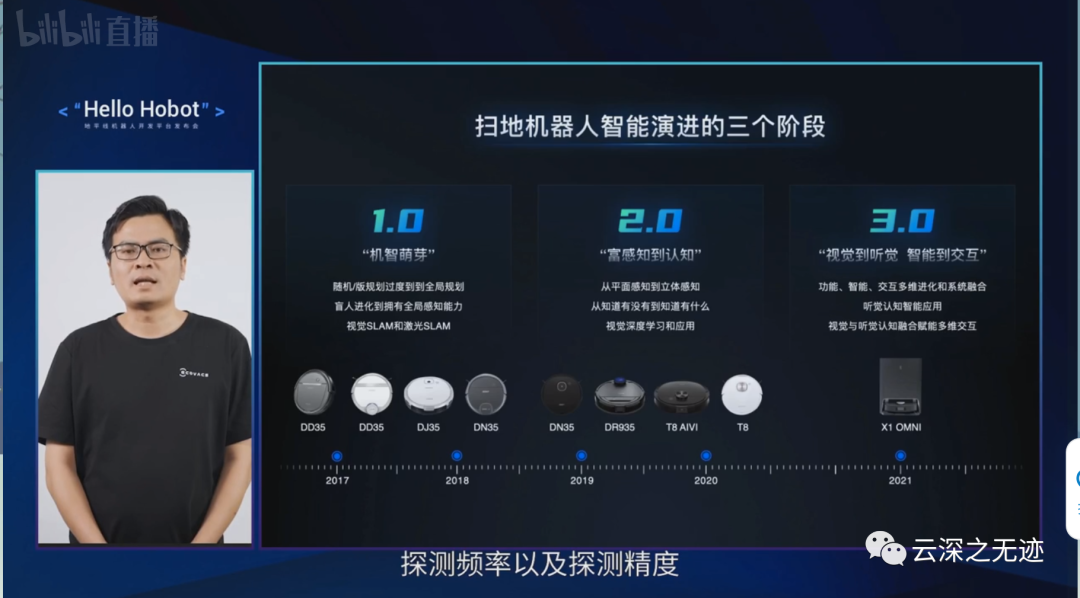
讲了一下扫地机器人的演进

这个地方笑死,说增加了多媒体能力,加了蓝牙播放功能了???

接着是舜宇光学的大佬,讲了一下现在光学的情况,以及顺手卖了两个相机,不过看啦RGBD相机的方案,Tof是绕不开了。不过,大佬的眼睛好小哦,是干光学是不是就得眼睛小。

这里下了BPU,等你们用完26个英文表,看你怎么办啊
靓仔疑问?
突然这个弹幕就出来了
BPU是地平线自研的AI加速核,在设计过程中具体结合了AIoT/Auto的场景需求,从算法、计算架构、编译器三个方面进行了软硬协同优化,使得在功耗不变前提下提高数倍的AI计算性能。
X3和J3芯片各内置了两个伯努利2.0的BPU核,它极大提升了对先进CNN网络的支持,同时大大降低了DDR带宽占用率,可提供实时像素级视频分割和结构化视频分析等能力。
我个人觉得就是ASIC芯片,对神经网络的计算进行了优化,至于是什么样的优化,无非就是并行处理,浮点,矩阵计算。
没毛病,确实焊死了

说实话,这个LOGO好看
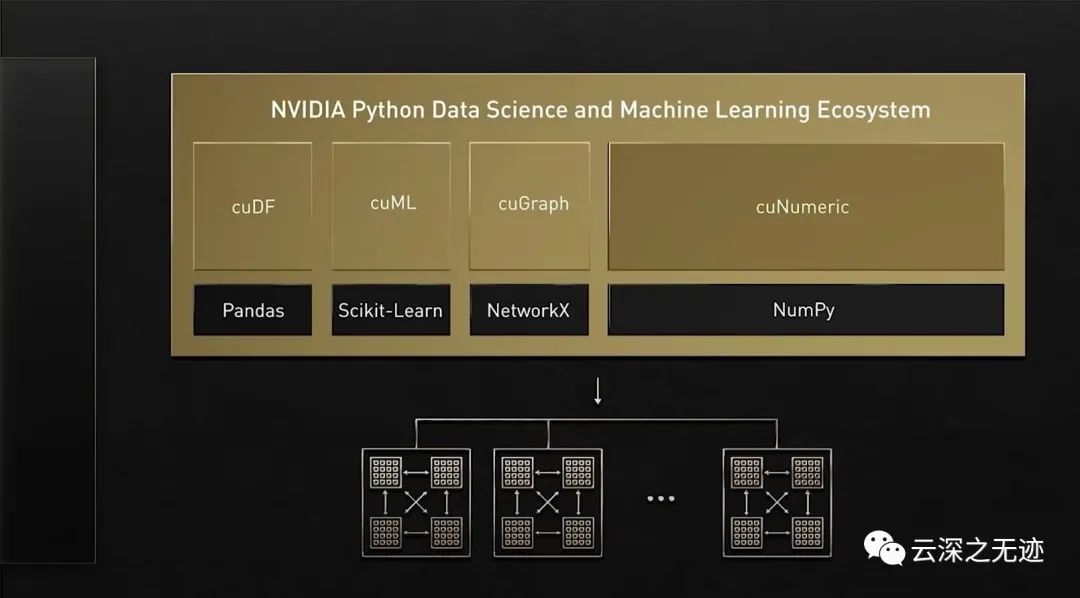
因为英伟达的PPT很好看,虽然N家的东西很吊,但是我一般是编译过不了,至少一次过不了(是我菜了)
最后是古月居的创始人,精神的小发型,只想教你ROS

在官网也说这个课程开放,以及开源的代码也有地址
TogetherROS机器人操作系统,是地平线面向生态开发者和机器人厂商推出的机器人开发中间件,基于ROS2深度优化扩展,依托于地平线AI芯片的强大算力,打造软硬协同、极致优化、丰富易用的机器人组件与开发者生态。

如果有机会,我们都看看
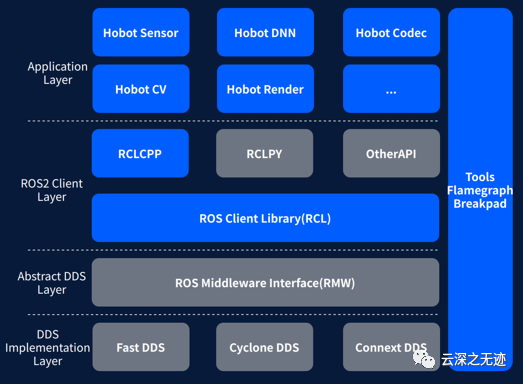
其中蓝色部分为地平线优化、新增模块,TogetherROS主要特性如下:
提供“Hobot Sensor”适配机器人常用传感器,节省开发时间,聚焦核心竞争力
提供“Hobot DNN”简化板端AI模型推理与部署,释放BPU算力,降低AI使用门槛
提供“Hobot Codec”软硬结合加速视频编解码,节省CPU资源,提升并行处理能力
提供“Hobot CV”软硬结合提升常见CV算子性能,节省CPU资源,提升运行效率
提供“Hobot Render”Web端动态可视化功能,实时渲染AI结果,便于展示与调试
增加“zero-copy”进程间领拷贝通信机制,降低数据传输时延,减少系统资源消耗
丰富中间件软件调试以及性能调优工具,提升问题定位效率,方便系统性能优化
与ROS2 foxy版本接口保持完全兼容,便于复用ROS丰富工具包,加快原型验证
支持最小化和模块化剪裁,方便根据需要部署在资源受限的嵌入式产品中

本末的大佬,因为是科创学院孵化出来的公司,所以格外关注

还记得大佬给我们介绍这个线圈绕组的机器

当时拍的一个双足机器人

最后也出现了科创学院!
其实看开发者论坛,也冷冷清清的,反响不是很大

不过可以近距离的看看板子
看测试图是X1C,嘻嘻嘻
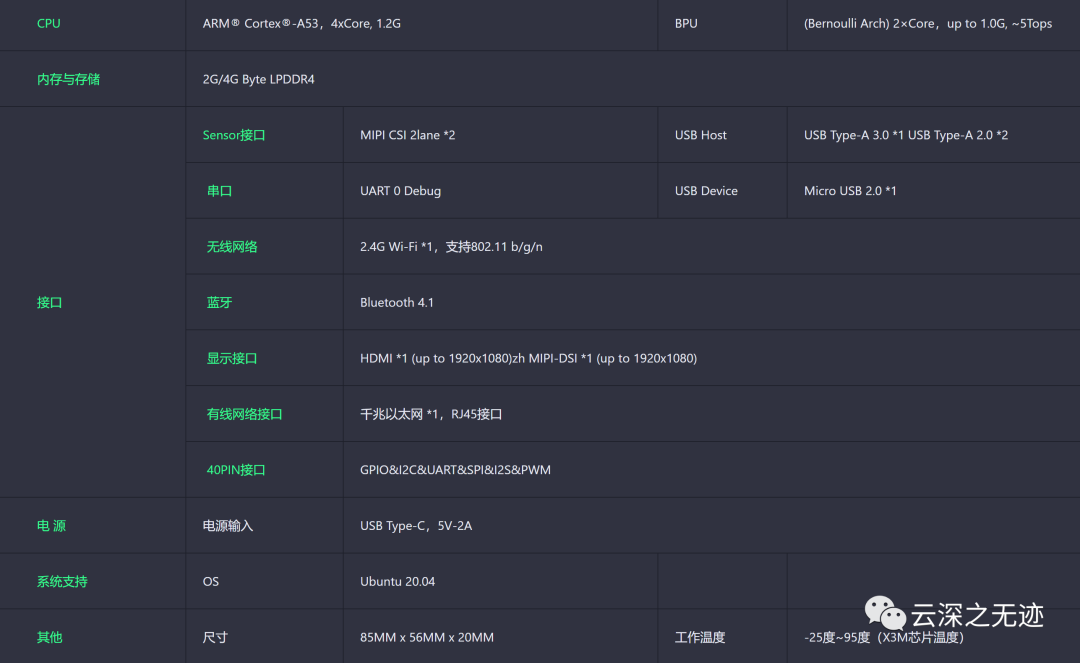
这个是基本的参数
内核是A53,和树莓派的片子一样
和我的想法一样

舜宇智能光学RGBD融合(TOF+RGB)相机HOR003,Hobot机器人开发者可选的成熟RGBD相机配件,可输出高精度深度、点云信息和灰度、彩色图像信息,通过RGBD融合算法可输出彩色点云图像,可实现机器人SLAM、避障、AI识别等应用。今天发布的就是这个,估计也没有什么了不起的技术,不然也不可能挂着这个发布会出东西。

剩下发的还有200W的RGB摄像头

还有乐动的激光雷达LD19
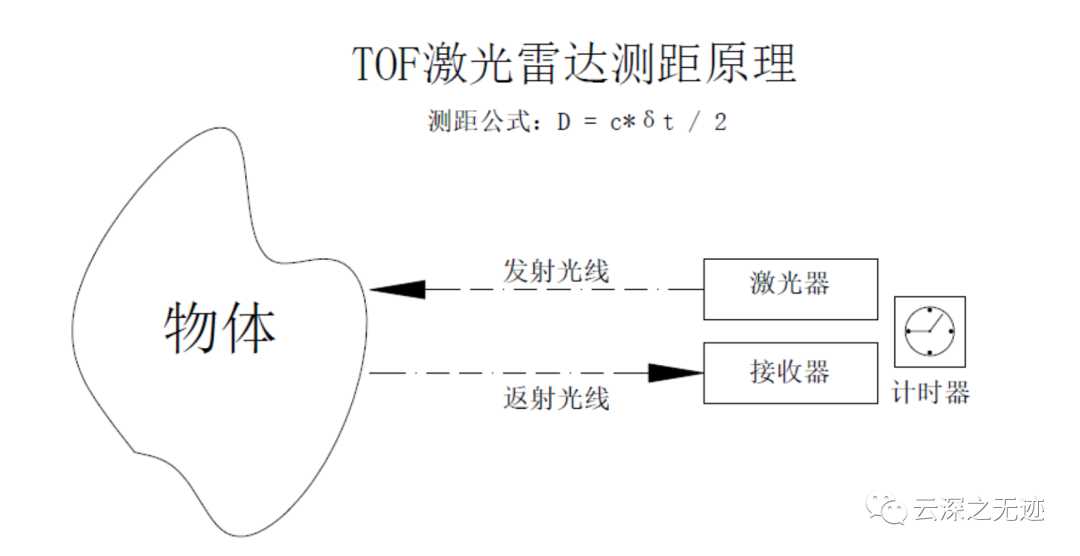
LD19 主要由激光测距核心,无线传电单元,无线通讯单元,角度测量单元、电机驱动单 元和机械外壳组成。LD19 测距核心采用 DTOF 技术,可进行每秒 4500 次的测距。每次测距时,LD19 朝前发 射出红外激光,激光遇到目标物体后被反射到单光子接收单元。由此,我们获取到了激光的发出时间和单光子接收单元收到激光的时间,两者的时间差即光的飞行时间,飞行时间再结合光 速即可解算出距离。获取到距离数据后,LD19会融合角度测量单元测量到的角度值组成点云数据,然后通过 无线通讯将点云数据发送到外部接口。同时外部接口提供 PWM,使电机驱动单元驱动电机。外部控制单元获取到转速后,通过 PID 算法闭环控制到指定的转速,从而使 LD19 稳定工作。
其实也是所有这种雷达的通用技术原理。
开源的代码要使用自己的仓库获取,我要开喷了

使用web端你是无论如何也发送不了验证码的。。。这个后端是怎么回事???气死我了,只能这边先准备好登录,然后在微信里面地平线的公众号的端口才可以发验证码。

鬼知道搞了多少次!对开发者好点行不行
总之千辛万苦就可以加进来

另外这些产品都是这些芯片赋能的,由此也可以看到,芯片会带动一个巨大的市场,一整套应用,低到编译器,高到应用框架。
先不看板子本身,先看下开源的代码,这里先打开app这个文件夹看看。
有中文的readme
使用的是ROS
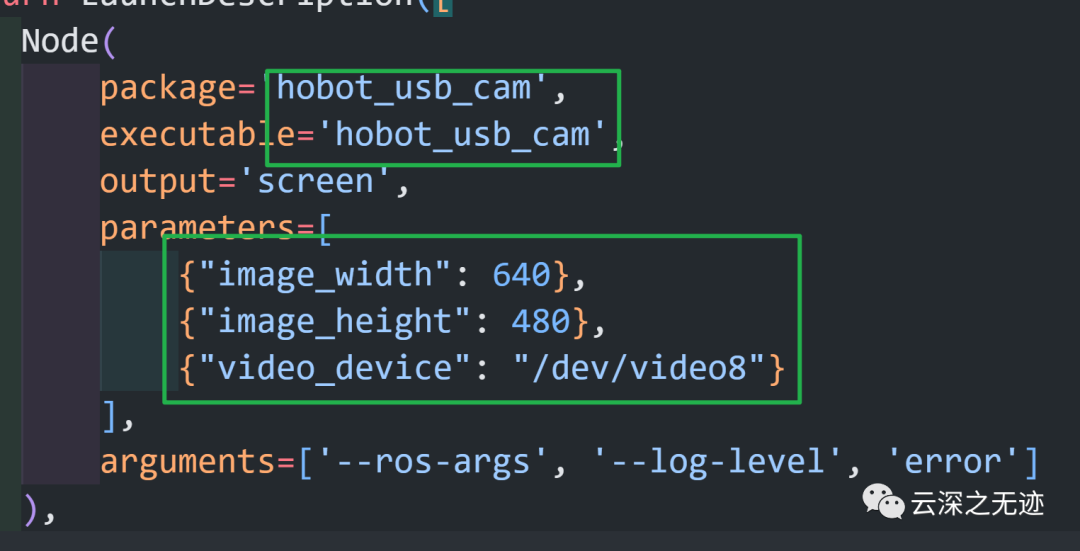
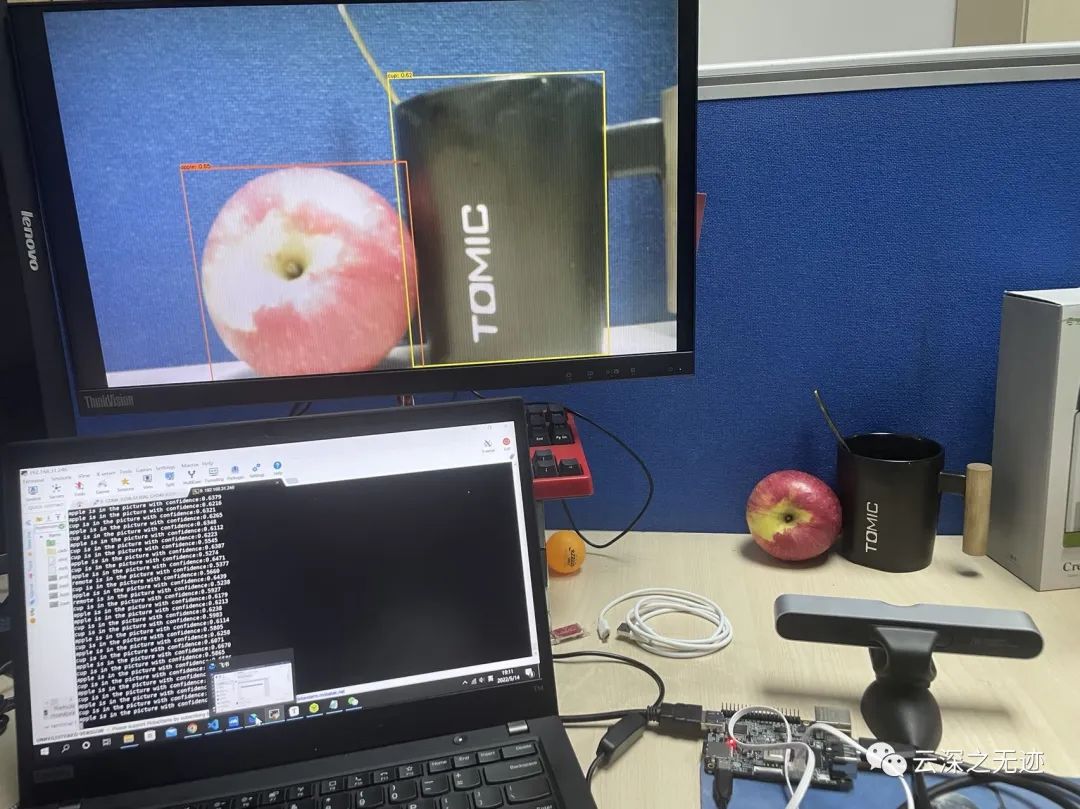
demo默认的是USB摄像头,然后这个是节点的一些设置信息
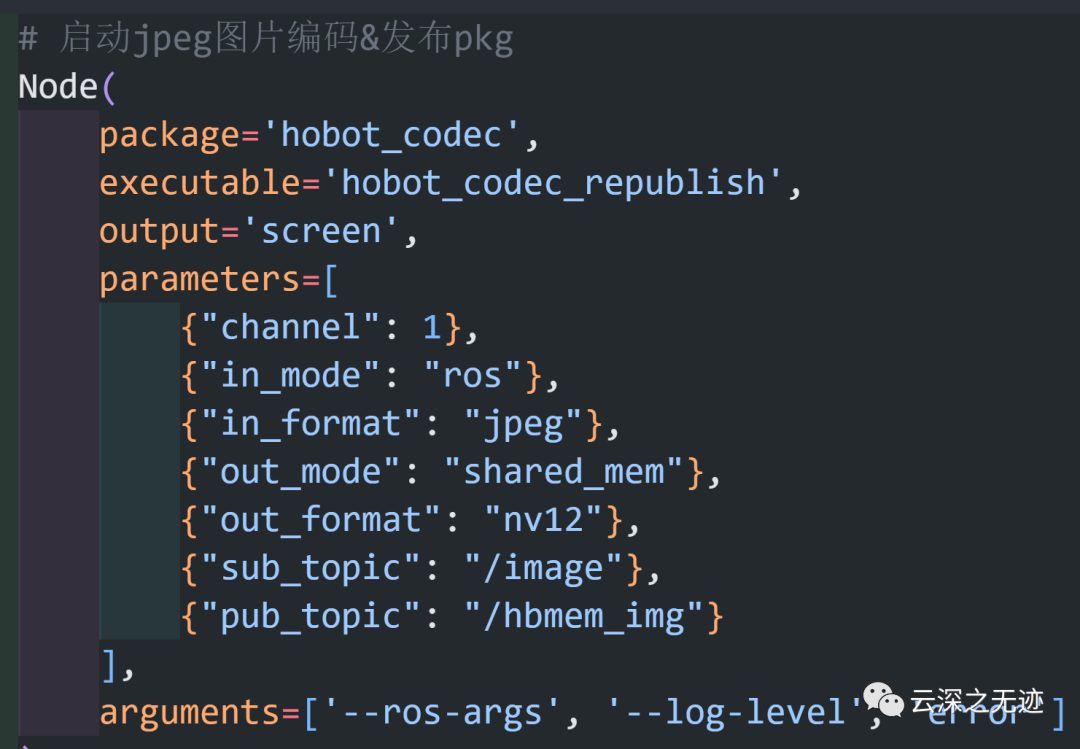
节点jpeg的发送
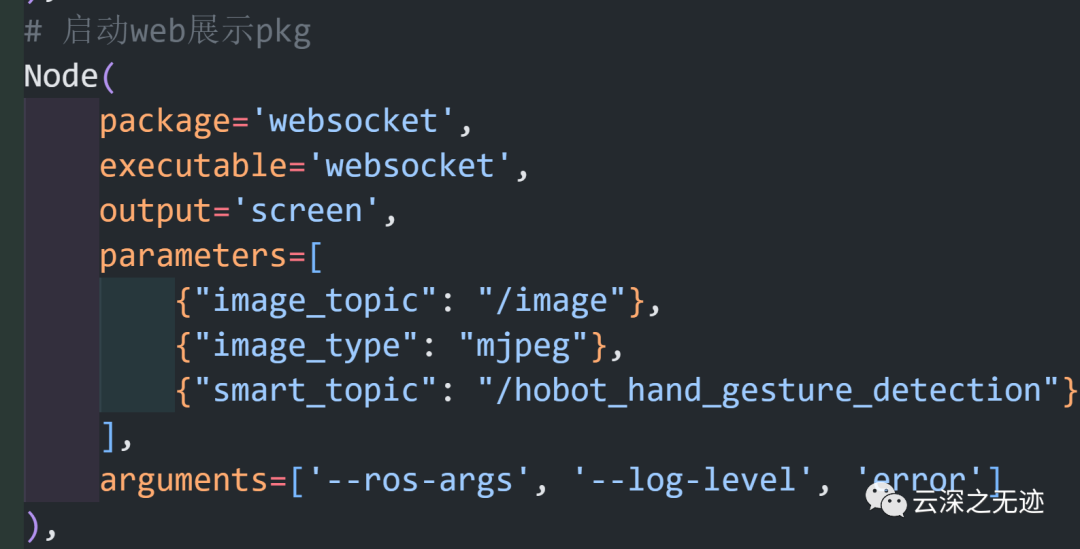
中间跳过了几个节点,这里是web屏幕显示
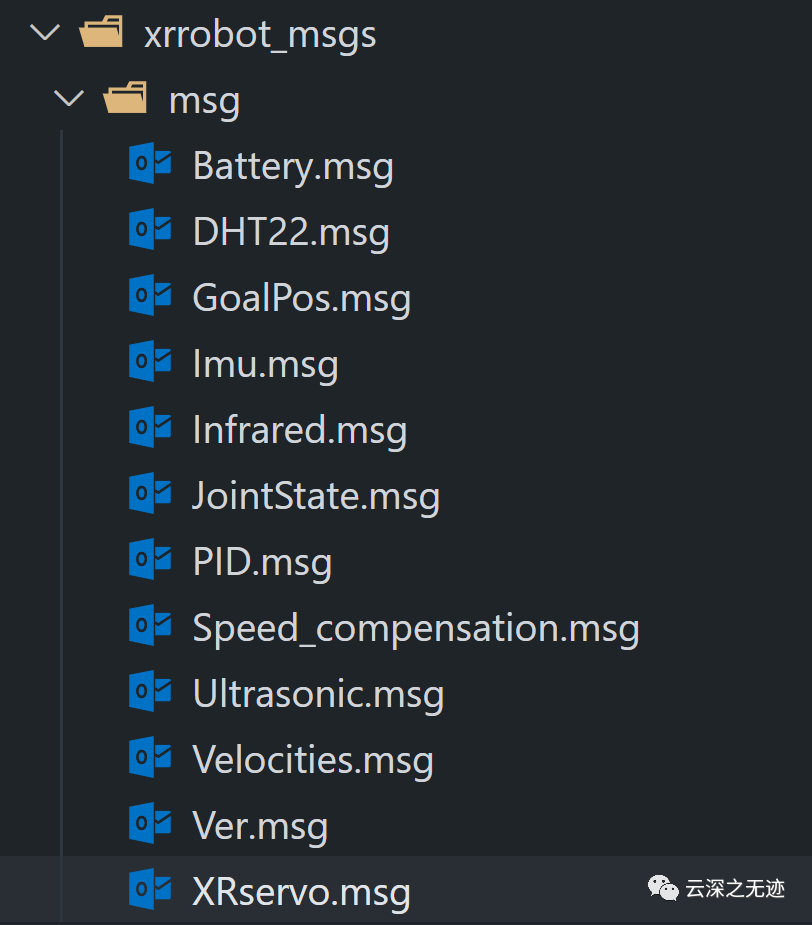
机器人的广播消息也有

看一个IMU的,陀螺仪的线速度,角速度,重力加速度,别bb,直接积分,问就是不知道。
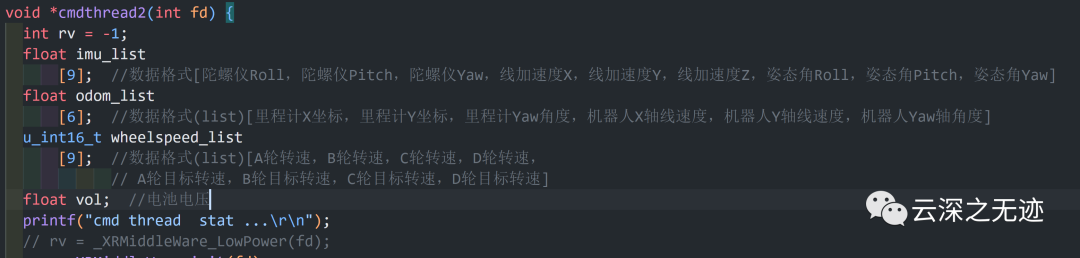
驱动里面我觉得写的还行,虽然我C++恶心,但是我可以看得懂
剩下的代码就不看了,大家也不爱看,而且今天也不是写这个的,至少知道了,地平线对于教育机器人这块,全使用的是ROS2.
接下来看看板子的手册:
当开发板通过以太网、Wi-Fi等方式接入网络后,用户可以通过网络进行远程登录。在使用远程登录前,需要确保PC机、开发板能够能够相互ping通。如无法ping通,则无法使用网络进行远程登录,用户可按如下步骤检查网络配置:
开发板、PC机IP地址前三段相同,例如开发板:192.168.1.10 PC机:192.168.1.100
开发板、PC机的子网掩码、网关保持一致
PC机网络防火墙处于关闭状态
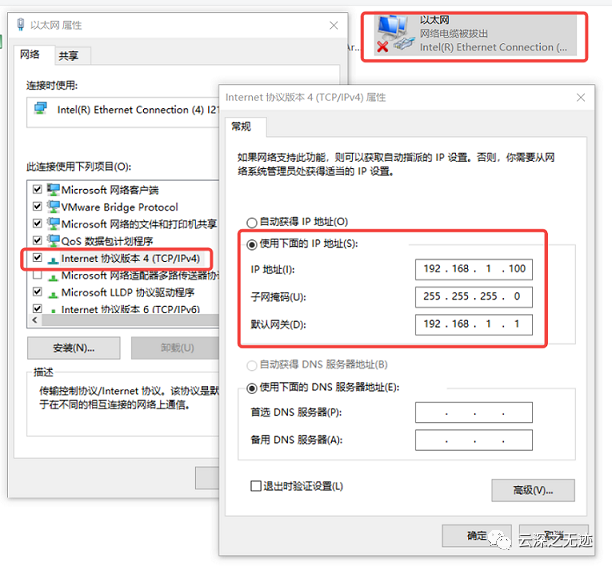
开发板以太网默认采用静态IP地址(192.168.1.10),以方便固定网络环境下的使用,例如开发板与PC机直连场景。此时用户只需要修改PC机的静态IP地址,并保证配置跟开发板位于同一网段即可。PC机静态IP修改方法如下:
在网络连接中找到对应的以太网设备并双击打开
找到Internet协议版本4选项并双击打开
在下图红框位置填入对应的网络参数,然后点击确定
我觉得这个文档写的很好,可以快速上手

板子的IO映射
关于板子的Linux版本,感觉是16
剩下的就是测试,相关API的文档
面对一个5TOPS的板子,其实五六百的板子,感觉价格没有很离谱,希望到咸鱼收一个玩。
因为本身也对地平线不太熟悉,可能文章中写的不是很中肯,但是我看好搞开源的公司,这是一种气度,希望再接再厉!
https://c-gitlab.horizon.ai/users/sign_inhttps://developer.horizon.ai/api/v1/fileData/doc/cn/index.htmlhttps://guyuehome.com/project/detail/id/35https://developer.horizon.ai/activity/id=89018995415500899https://developer.horizon.ai/api/v1/fileData/doc/cn/common_doc_cn/x3_soc_user_guide.htmlhttps://developer.horizon.ai/api/v1/fileData/documents_pi/Samples/AI_Inference.htmlhttps://www.horizon.ai/technology.html