谈谈Bootloader自更新
谈谈对两家AUTOSAR工具看法
奥迪首款800V车型技术总览
CAN设计与应用指南
汽车软件需求是如何变成用户功能?
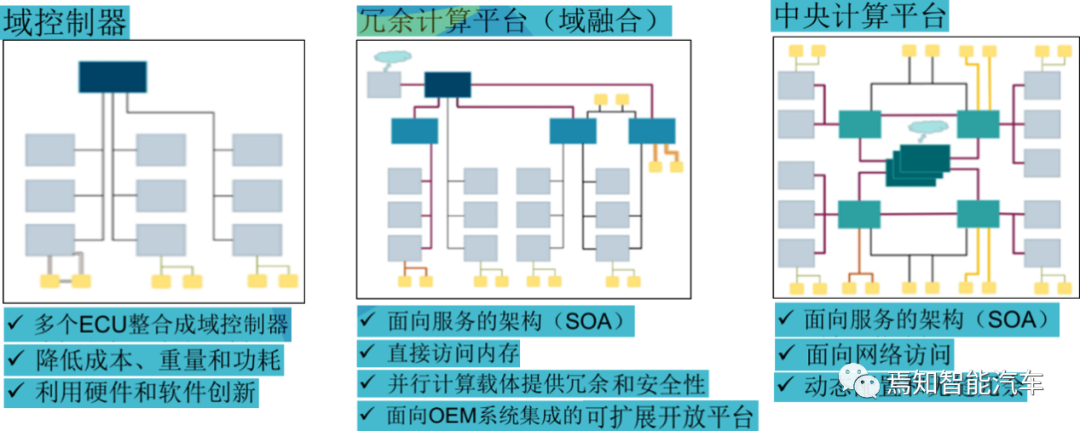
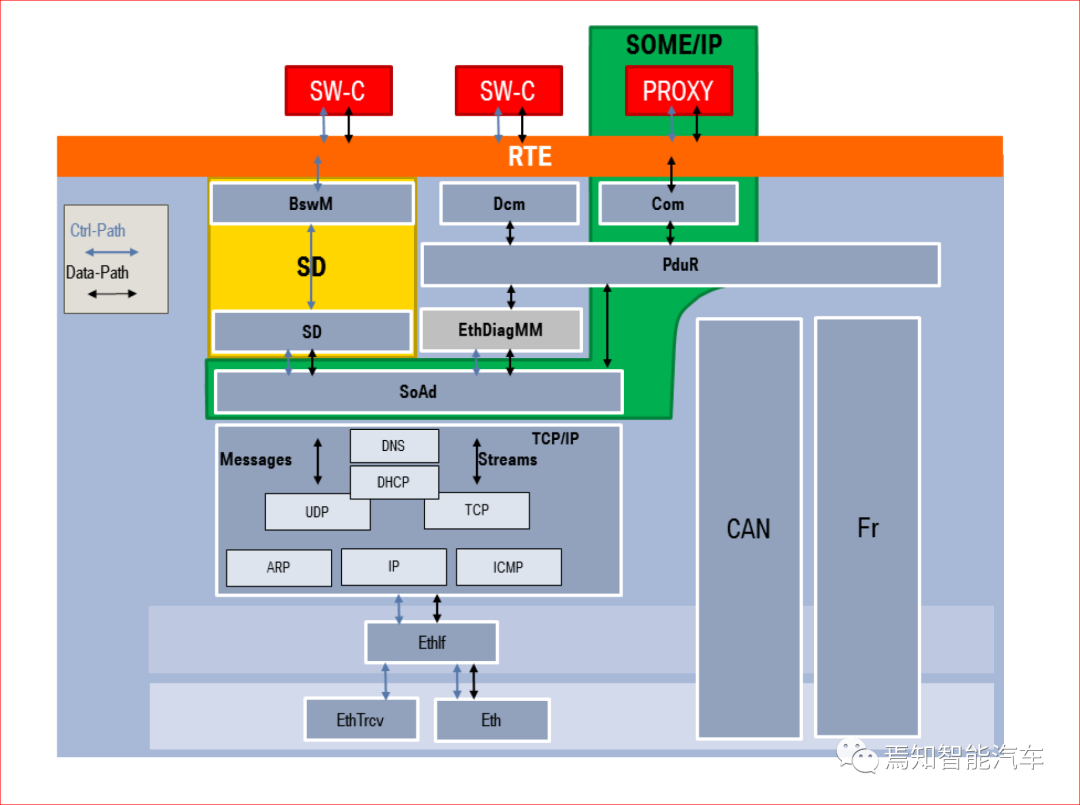
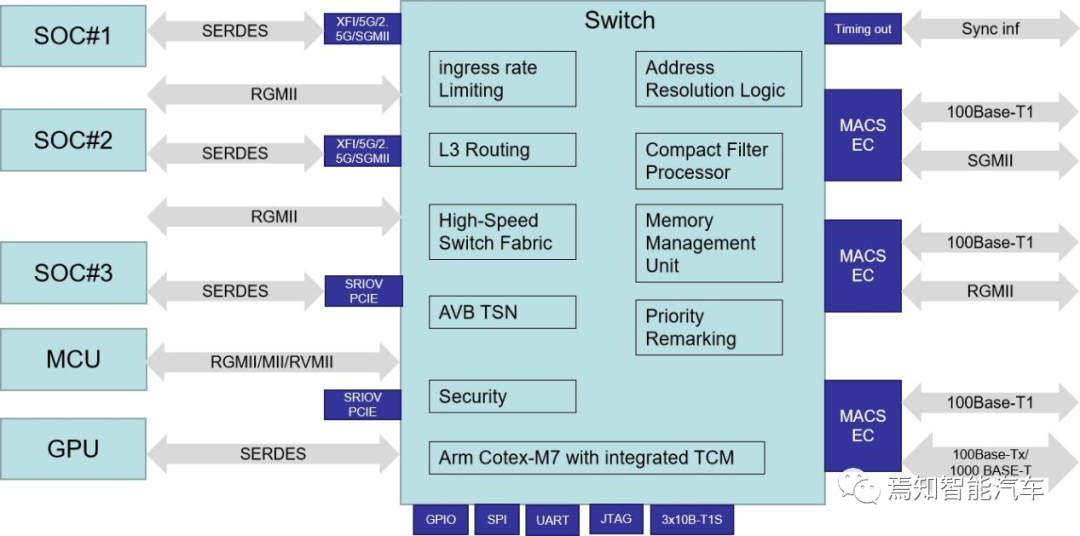
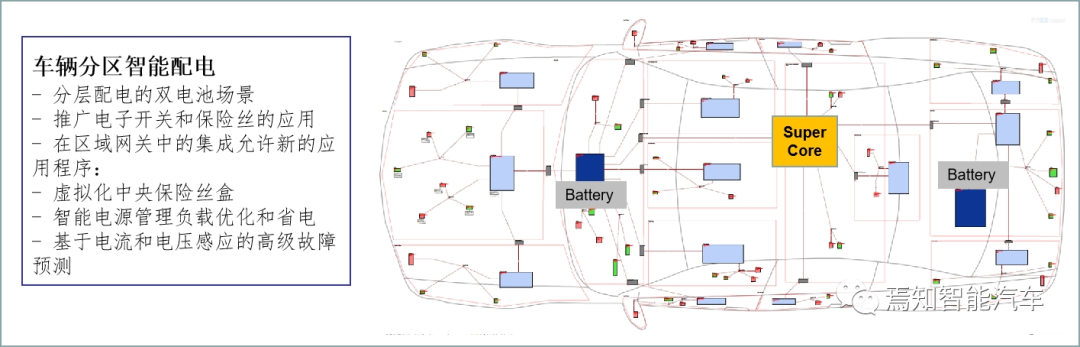
电子电气架构设计需要考虑哪些方面?
汽车E/E架构的网络安全分析
分享不易,恳请点个【👍】和【在看】