
来源 | 雷达信号处理matlab
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢
我们知道,雷达在由距离、方位角和俯仰角所构成的三维球坐标系中测量散射体的空间分布。
同时,多数雷达也处理对应于慢时间(对应脉冲个数)或阵列天线接收信道的傅里叶变换域信号。这些频谱域分别对应多普勒频移和波达角度,并且表示雷达信号潜在的第四维和第五维信号。如果要数字化地处理这些信号,产生的第一个问题就是如何在每一维选择采样间隔。
一部脉冲雷达通常有好几个独特的并且相互独立的采样间隔;我们这里讨论六个。首先讨论的两个均为时间采样间隔。
如下图所示,它给出了一部脉冲雷达数据采集的常规方法。假设该雷达具有一个诸如相控阵的多相位中心天线。雷达发射周期性脉冲序列;该周期被称为脉冲重复间隔(
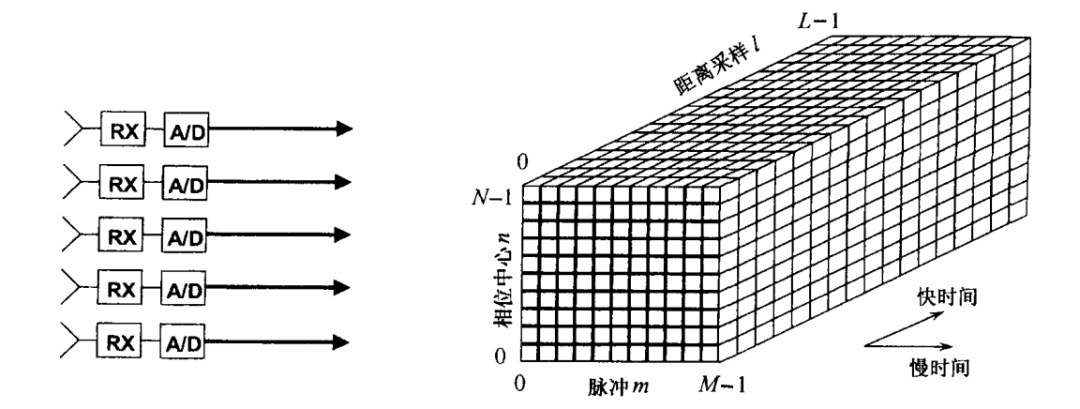
在脉冲间隔的一部分时间内,每个天线信道接收到的信号被高速采样,采样率一般为几百千赫兹到几十兆赫兹,有时会更高。把信号转换成基带信号后,可以认为从某个信道中的一个脉冲获得的高速采样串被存储在结构
从同一信道的第二个脉冲获得的采样串,被存储在同一层的第二行,以此类推。该数据采集和存储方法为理解大部分数字雷达信号处理操作过程提供了很好的概念性的模型。
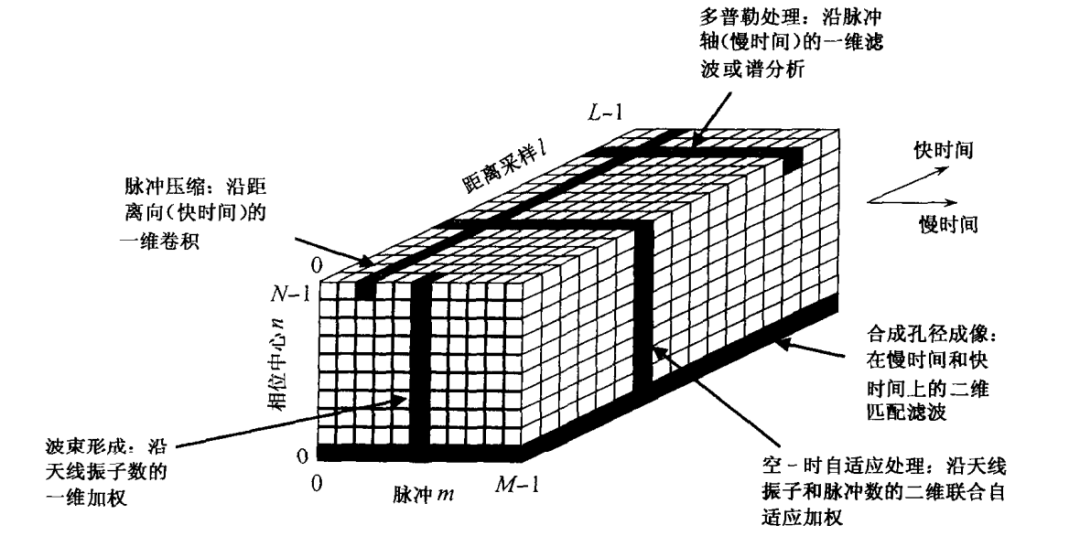
下图列举了多种基本的雷达信号处理运算之间的关系。例如,脉冲压缩对应于快时间域(即距离维)内某一向量的一维卷积。另外,脉冲压缩可以对每个脉冲或接收信道的各个距离向量独立地进行。
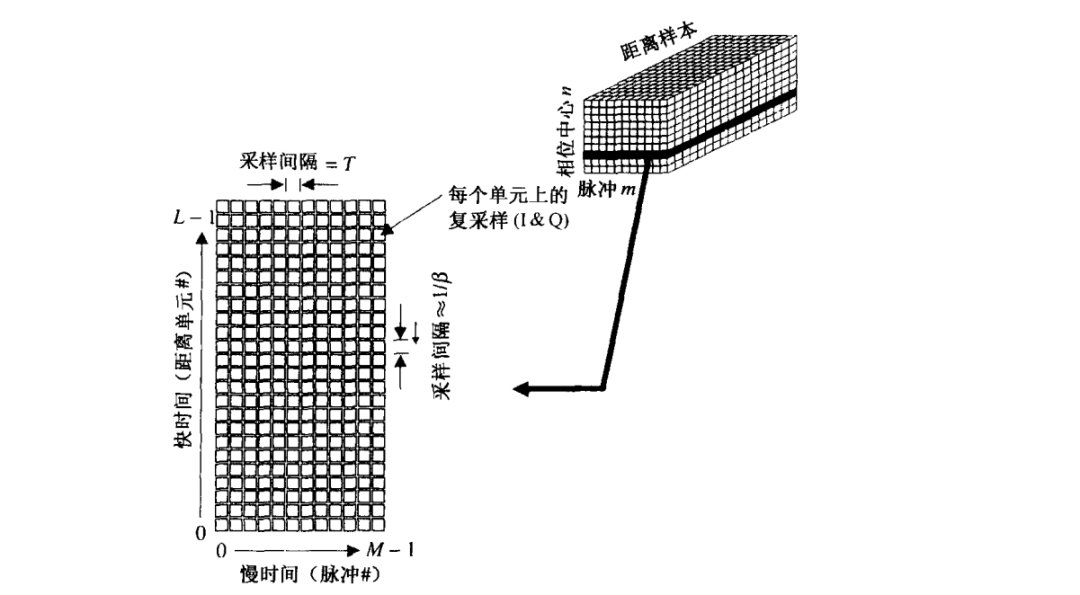
在多数情况下,对于给定的接收信道,我们只关心数据块中快时间维和慢时间维(即距离和脉冲数)所构成的二维子矩阵。在仅有一个接收信道的系统中,数据块退化为数据矩阵。下图给出了对数据块某个信道进行数据提取后构成的数据矩阵
时间和频率采样
首先关注脉冲雷达采样间隔
空间采样
空间采样是从两方面提出的。考虑一个使用可操控天线的系统,无论是机械操控(通常为抛物柱面反射器或槽型平面反射器阵列等)还是电子操控(相控阵列)均可。当天线向不同方向转动时,应当多长时间发送一个脉冲以得到对环境的采样?
该问题会使我们考虑到空间维方位角采样间隔
当天线系统是相控阵时,也会遇到空间采样的问题。在这种情况下,阵元对进入阵列表面的波前进行采样。因此,阵元的间距也是另一种空间采样间隔。
采样准则
通常,采样速率的选择是基于奈奎斯特采样准则的应用。奈奎斯特准则是在假设信号带限的情况下,保证所选择的采样速率能够将原始的连续时间(空间)信号从其样本中精确地重建。当然,这个准则可以应用于对雷达信号的采样之中。
但事实上,原始雷达信号从来没有从样本中重建过;我们仅通过处理样本来估计环境信息,然后就将其抛弃了。而且,实际中的雷达脉冲并不总是良好的带限信号。因此,奈奎斯特准则的合理性与雷达信号的采样不是直接相关的。那么,还能采用什么准则呢?
信号的采样准则应当适用于所采样本的应用范围。我们知道,雷达的基本功能是探测、跟踪和成像。
在这些功能中,探测是最基本的。探测可以通过时域中的脉冲回波进行,也可以通过频域多普勒频谱的估计进行,或者在雷达图像的空域中进行。这里考虑基于单脉冲回波时域分析的探测。
基本的探测方法是检测接收回波信号的幅度,并把它同门限
该过程离散时间的实现只是检测在离散时间点
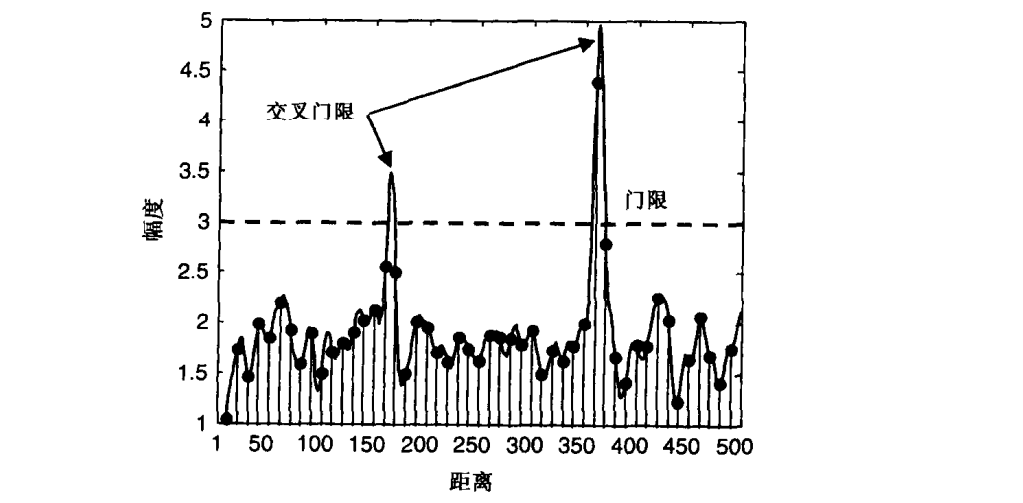
上图解释了门限检测的概念,及其离散时间实现时漏检目标的可能性。连续信号(实线)在横坐标
第二个距离采样准则可以从分辨率的角度得到。应当以足够细微的间隔对一幅图像进行采样,以保留采样前图像中的所有细节。成像设备的空间分辨率限制了图像的细节。因此,可以基于雷达分辨率推出距离向和方位向(角度)采样准则。类似地,在多普勒频域中也可推导出基于分辨率的采样准则。
脉冲重复间隔决定了距离向和多普勒向的无模糊间隔。下图说明了脉冲雷达中距离模糊的概念。
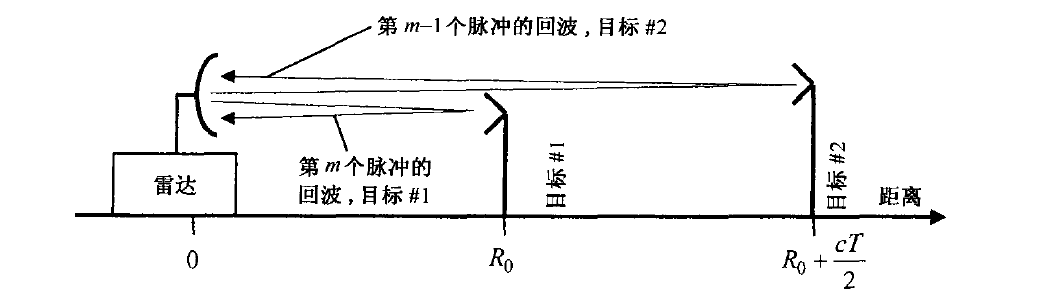
从距离
模糊的概念也可以用于多普勒频域的处理。接收信号中所显示的多普勒频移是由各种因素决定的,其中一些是雷达外部的因素。对于飞机等运动目标,雷达和目标相对速度的径向分量及工作波长决定了目标的多普勒频移。在成像雷达中,成像地形会体现出多普勒频率的展宽,它是由雷达平台运动、天线波束宽度、视线方向以及波长决定的。这些因素决定了回波中多普勒频移的范围,而
与所关心的诸如探测性能和成像保真度直接相关的采样规则,其实与每一维的奈奎斯特准则是相似的。这并不奇怪。虽然在雷达中模拟信号一旦经过采样就从没有被重建,但是保留原始信号中有用的信息也是采样的一个目的。奈奎斯特准则保证了原始信号可以从它的样本中恢复,从而也保证了在采样的过程中不会丢失有用的信息。
快时间维采样
雷达接收数据有快时间维和慢时间维之分,不同的维度决定了不同雷达不同的测量性能。接下来我们详细介绍雷达快时间维的采样过程。
由上图可知,快时间维采样即为距离采样。则应当以多快的速度对所接收的单脉冲回波进行采样呢?即距离单元的间距应当是多大呢?奈奎斯特定理表明,采样速率应当等于或者大于接受信号的带宽。
我们知道距离维的接收信号可以看做距离向反射率函数与发送波形调制函数
这表明,快时间维接收信号的带宽受到发射脉冲带宽的限制。因此,快时间维的奈奎斯特采样率即为发射脉冲的带宽。
在频域,简单脉冲的频谱是中心位于频率
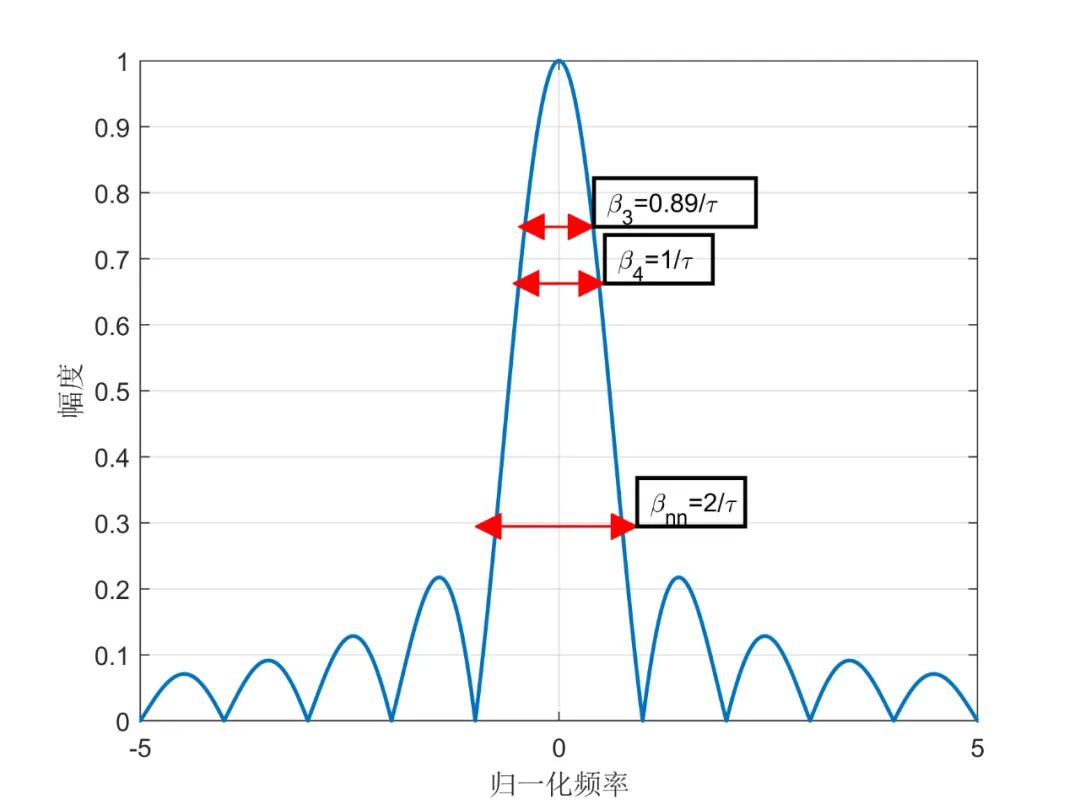
因为
例如,在频谱上,根据比峰值小
尽管有局限性,这里仍采用瑞利带宽
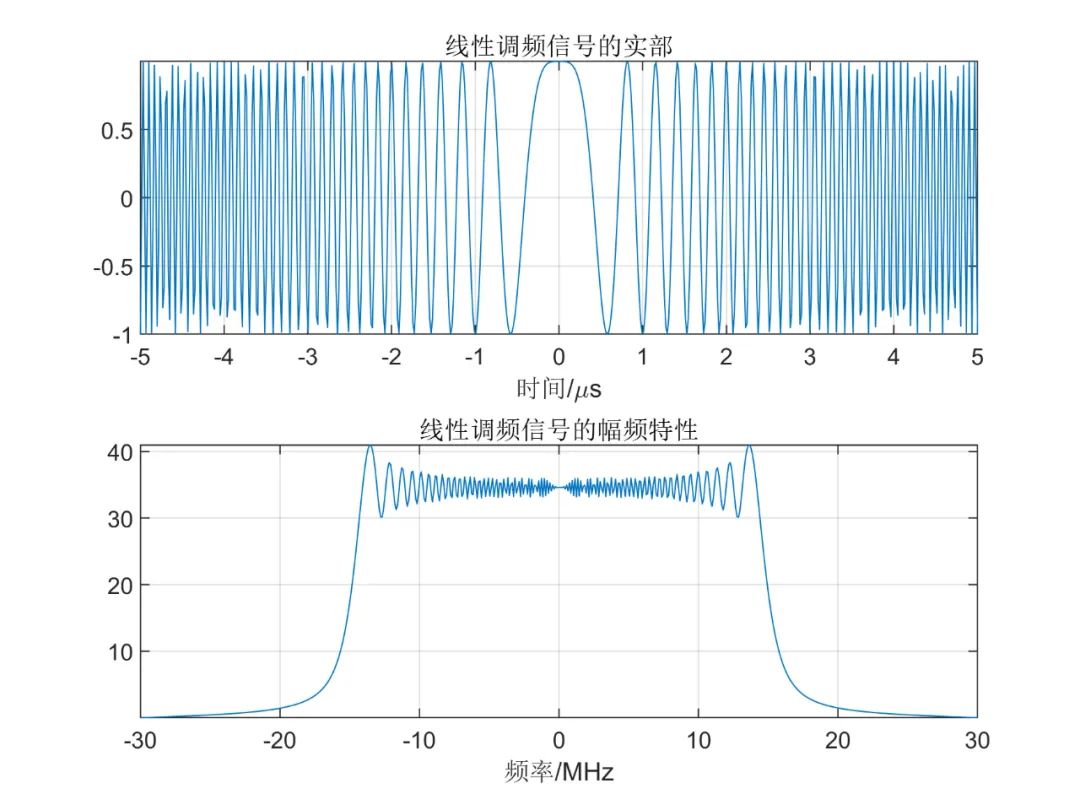
为了增加其带宽,常常对脉冲进行相位调制。这时,脉冲的频谱将不再是
因此,将雷达接收到的理想相位调制脉冲转换到基带后其理想化频谱模型为
- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
