

1. 融合! 融合起来!
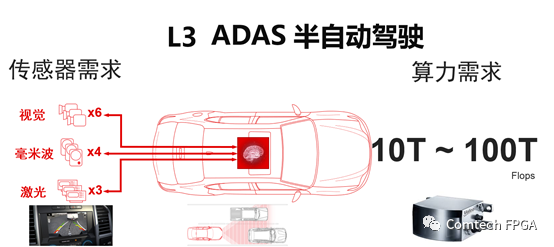
对于L3来讲,由于高级别半自动驾驶(如代客泊车AVP)需要对地图进行构建,并进行基于地图的路径规划,通常需要引入激光雷达(为解决盲区,还需要布置高低位置的多个激光雷达),视觉、毫米波和激光雷达的数量总数基本会超过10个:
随着高级辅助驾驶需要更多传感器种类与数量,如何将这些信号归一化为主控SoC需要的数据,也就是传感器数据归一化(normalization)的需求如何实现呢?这就是我们提及的传感器融合的需求了:
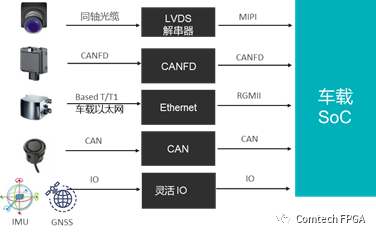
那么传感器数据数据归一化,具体来说要如何进行呢?我们由下图来解释一下:
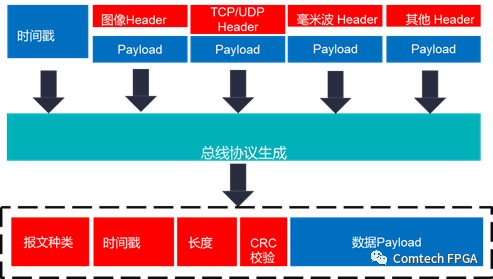
将多个传感器数据的负载(Payload), 统一打包为包含报文种类、时间戳(Time Stamp)、其他包头信息和负载的数据包,传送至主控芯片,就是传感器融合的信息了。
我们来总结一下传感器融合的作用:
A 获取车辆环境信息;
B 获得更精确的结果;
--均衡不同传感器的权重
--针对传感器失效的鲁棒性
--各传感器取长补短
C 主要任务
--定位
--地图绘制
--路径规划
2. 当融合时且融合
当我们意识到传感器融合的优势时,就会发现FPGA在传感器融合上的优势:
--FPGA的IO Pin可以灵活配置,适合不同的传感器接口
--FPGA的逻辑可以灵活设计,针对不同型号的传感器做出针对性的设计。
而传感器融合的基石,就是如何进行数据同步!

针对上述的同步,具体方式如下:
1. 硬件同步 / Hardware synchronization
--使用同步触发(trigger acquisition, FPGA的强项之一哦!)
--所有传感器使用同一个硬件给出的时钟源(FPGA的IO资源非常适合做配置!).
2. 软件同步 / Software synchronization
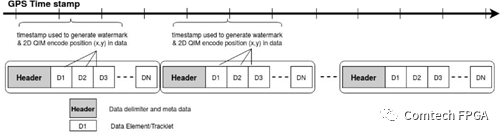
--使用时间戳(timestamp ) 同步
--每个传感器自行加入校正后的时间戳
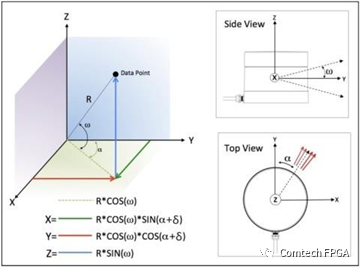
3. 空间同步 / Spatial synchronization
将各传感器坐标系统归一化为统一系统(对坐标系转换的硬件加速也是FPGA的强项!)
4. 时空同步 / Spatiotemporal synchronization
--以上所有同步的综合
下面也给出一些使用FPGA进行同步的技术技巧:
1. 统一的的坐标系与时钟;
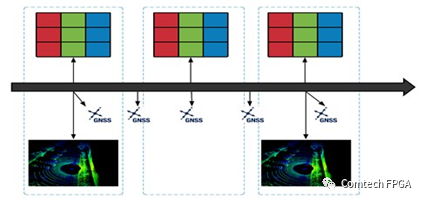
2. 使用GPS提供时间戳的时钟同步与校准;
3. 一般使用激光雷达提供Trigger , 作为数据对齐基础;
--这是自动驾驶技术的历史传承,基于ROS / ROS2 的 Autoware, Baidu的Apollo及其他开源版本都是如此。
4. 传感器相互之间进行校正 ( Sensorcalibration );
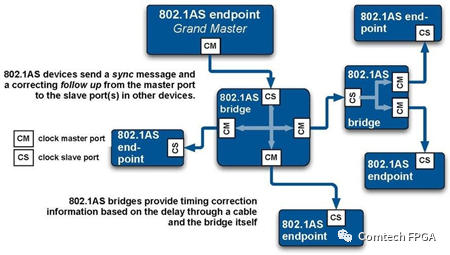
同步后数据,如何通过网络在车内网络传输,也是传感器融合的重要功能,而TSN (时钟同步网络) 更是会助力融合更好地进行!
3. 如何十分安全地融合?
既然传感器融合主要用于汽车应用,功能安全就变得非常重要!针对功能安全的需求,作为可编程器件领先品牌,赛灵思针对各行业的安全需求,提供了由原厂或第三方提供的服务:
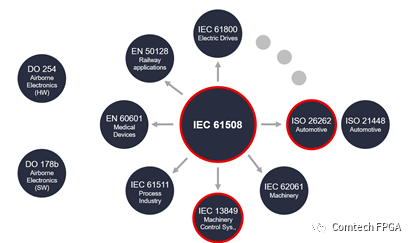
其中和汽车相关的 IEC-61508和 ISO-26262认证,赛灵思都提供原厂直接支持的文档、工具和服务。
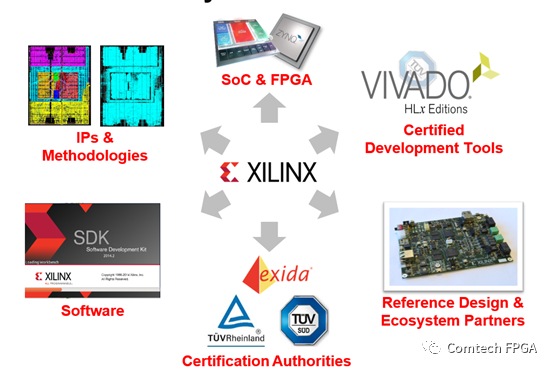
当然还有经过车规验证的各型号SOC/FPGA、IP、工具链和参考设计开发板,如果您有需求,都欢迎联系科通哦!
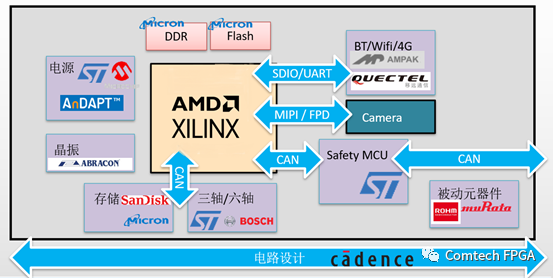
针对车规需求,我们集成科通代理的相关产线,为您提供整体方案。下图也只是其中一部分哦!
更多信息,欢迎联系:
lukeliu@comtech.com.cn
simonyang@comtech.com.cn
charlesxu@comtech.com.cn

