
来源 | 雷达信号处理matlab
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。
FMCW 雷达基本原理
下图为频率随时间变化呈线性升高的 FMCW(线性调频连续波)幅度-时间图。
则该 FMCW 的频率-时间图如下图所示。该线性调频信号具有起始频率
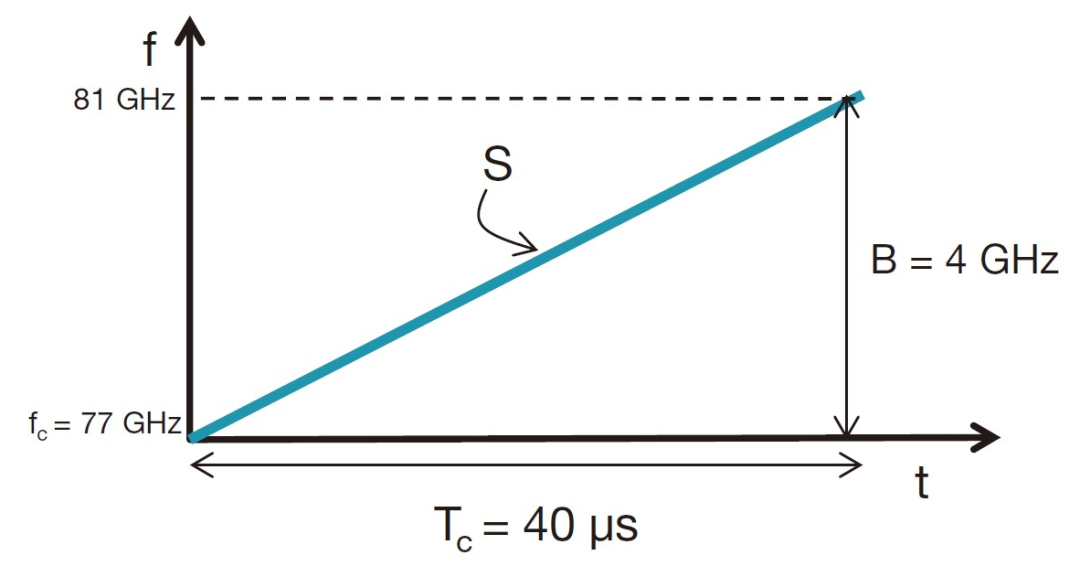
该线性调频信号的斜率
则针对单个静止物体 FMCW 雷达发射信号与接收信号,以及接收信号混频后得到的 IF(中频)信号如下图所示。
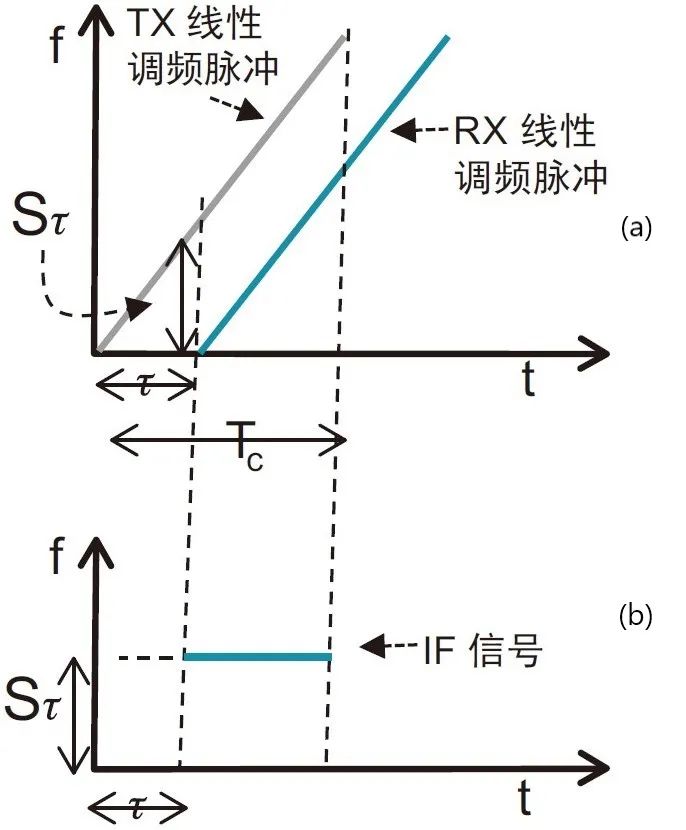
从图中我们可以看出:RX(接收)的线性调频信号是 TX(发射)线性调频信号的延时副本。
从发射信号起到接收到回波的时间
混频器的输出 IF 信号为将两信号重合区(即图(a)中垂直虚线之间的时段)内的两信号相减即可。这两条线之间的距离是固定的,这表示IF信号是一个频率恒定的单音信号,且该恒定频率为
故雷达前方的单个静态物体产生频率恒定为
距离分辨率
如果雷达探测到多个物体,则在 RX 天线处会接收到多个线性调频反射波。即 IF 信号的频谱图将显示多个谱峰,每个谱峰所对应的频率与相关物体距雷达的距离成正比。
下图显示了接收自不同物体的三个不同的RX线性调频脉冲。
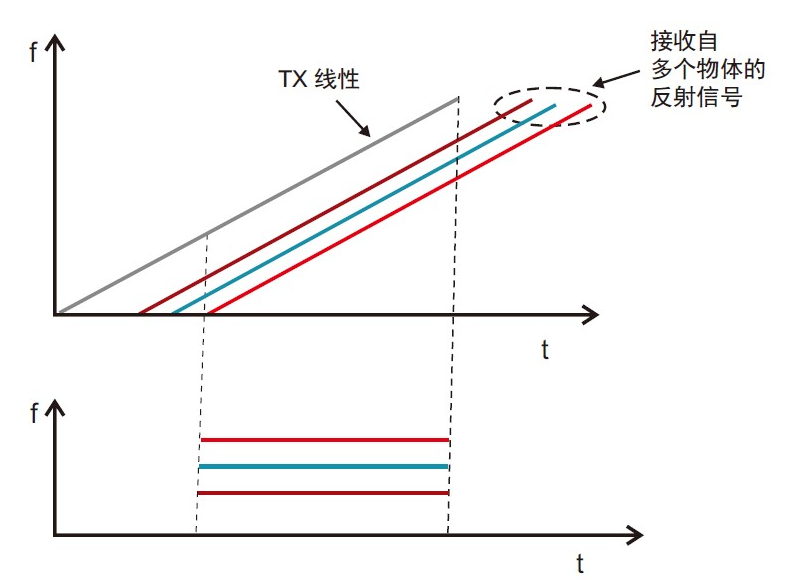
其相应的频谱图如下图所示。
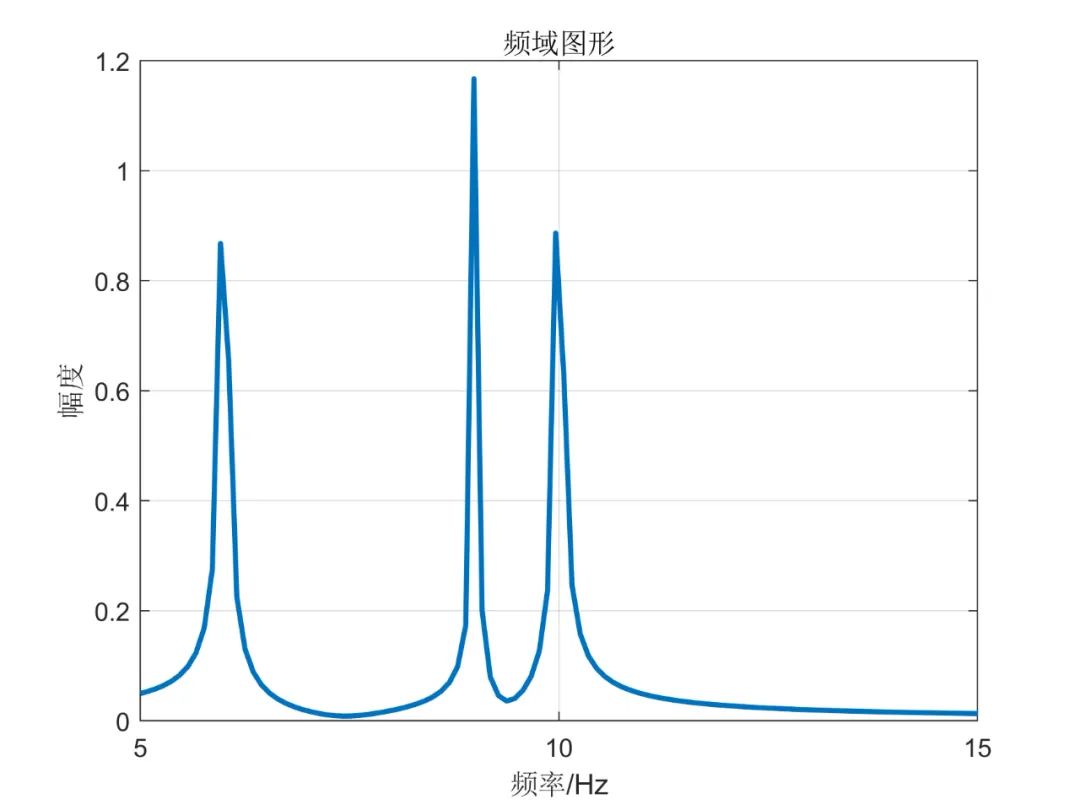
线性调频毫米波雷达是通过对 IF 信号频率的测量来确定目标的位置等信息。将物体区分开即为将谱峰区分开。也就是说距离分辨率转换为频率分辨率。
频率分辨率
频率分辨率(frequency resolution)是指将两个相邻谱峰分开的能力。在实际应用中是指分辨两个不同频率信号的最小间隔。
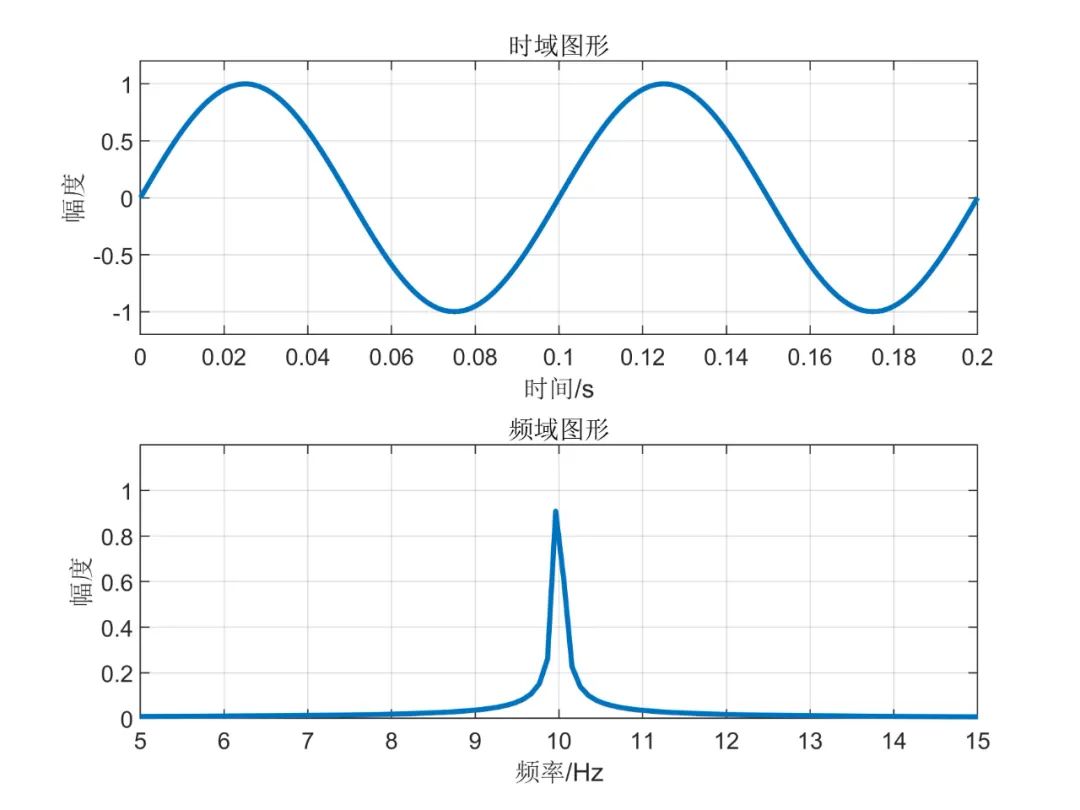
我们知道傅里叶变换能将一个时域信号转换为频域信号,且时域中的单音信号(如正弦信号)在频域中只会产生一个峰值。如下图所示。
在下图的观察窗口 T 内,蓝色函数完成 2 个周期,而红色函数完成 2.5 个周期。两个函数 0.5 个周期的差异不足以分辨出频谱中的两个谱峰(即频率)。
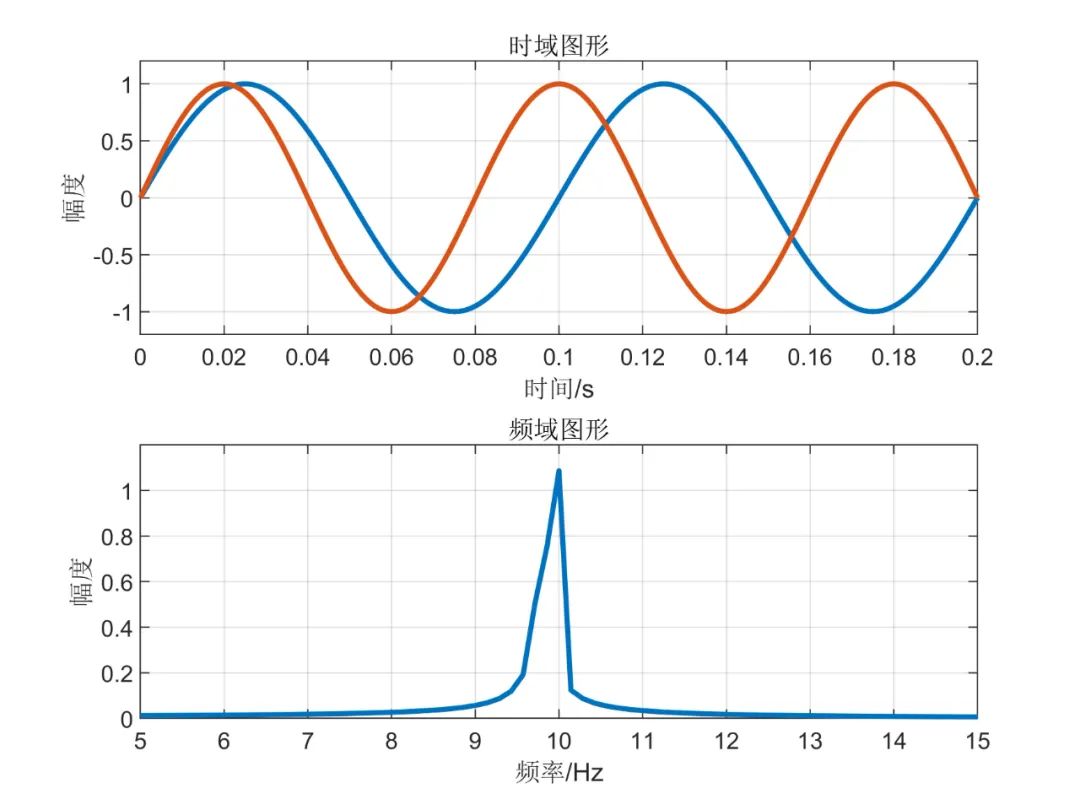
将观察窗口 T 加倍,使个周期的差异为 1 个周期。则可以分辨出频谱中的两个谱峰(即频率)。

从上面的仿真结果我们可以看出,对回波信号的观察周期越长,信号处理后得到的频率分辨效果就越好。一般来说,观察时长为 T 的一个观察窗可以分离相隔超过 1/T Hz的频率分量。
而由上可知,观察窗口长度为
又因为与雷达相距为
故对相隔距离为
式中,
由上式可得,距离分辨率 (
雷达的目标分辨率是其区分距离或方位上非常接近的目标的能力。制导雷达需要很高的精度,应该能够区分相距仅几米的目标。搜索雷达通常不太精确,只能区分相距数百米的目标。分辨率通常分为两类:距离分辨率和方位分辨率。
距离分辨率
图源自radartutorial
雷达的距离分辨率
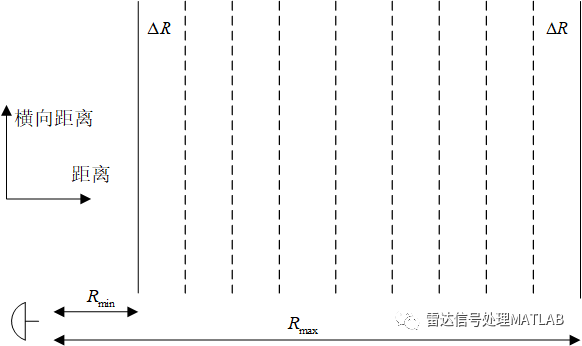
距离和横向距离上分辨目标
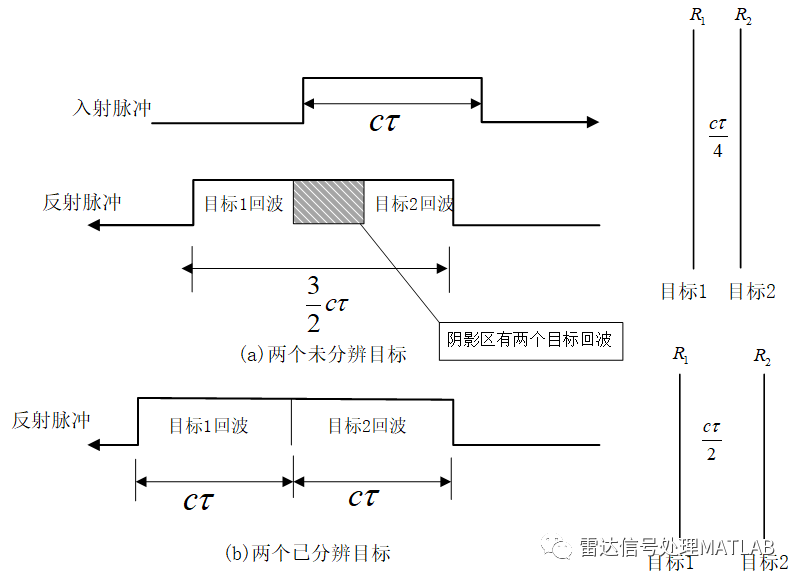
雷达对目标的分辨
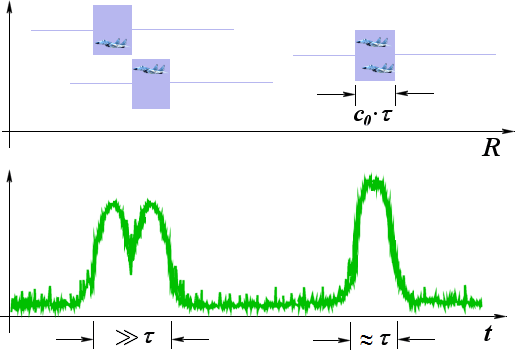
其动态演示图如下图所示,图(1)为雷达未能将两目标区分时的雷达回波,图(2)为雷达将两目标区分时的雷达回波示意图。
图源自radartutorial
因此,在脉冲雷达中最小距离分辨率
图源自radartutorial
本文参考《雷达系统分析与设计(MATLAB版)(第三版)》,有兴趣的可以购买书本帮助理解。
- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
