

面向自动驾驶控制算法岗位,汽车学堂推出的《自动驾驶控制算法训练营》的课程体系。是结合市面上岗位要求的核心技能和必备的知识推出的三阶段课程,从阶段一的开发语言工具和控制理论基础入门,阶段二进行深入的控制理论、控制算法建立控制模型,积累demo项目经验。
阶段二学员部分作业结果
理论学得再扎实,还是得经过实际工况检验,毕竟岗位是面对实际量产。
阶段三将理论算法实际部署到自动驾驶车辆上,在虚拟环境的模型都是理想状态,车辆横纵向控制(车道保持和自适应巡航)以及紧急避障和绕障任务在实车上将如何实现,遇到不同突发状况又该如何解决?
一辆车最终能够完成自动驾驶跑起来,需要用到感知、决策以及规划和控制算法,这在线下实训营都能清晰地了解整个无人驾驶开发的过程是如何实现的。
对于转岗的学员来说,去到企业面试不仅会被考察理论基本功是否扎实,更会考量面试者的工程项目经验,毕竟理论学习到实际量产还是有很大的距离。对于实际工程开发中遇到的问题,如果没有实际开发流程经验和心得,能够说出一二三,又如何能够说服面试官?
 线下实车教学
线下实车教学
这对于想要从事控制算法工作的学员非常友好,能够体系化学习,从理论基础入开始到开发项目实战,形成学习闭环。
而且不同基础背景的学员可以选择不同阶段的课程
目前报名控制算法体系课程的学员背景除了以车辆工程、机械工程等比较对口专业的学员外,其他类似电气工程、计算机科学以及通信工程等专业背景的学员也逐渐增多。学习的主要原因是想要转岗或者是面临就业的学生和在职工程师们想要提高自己的个人能力去迎接更高的挑战。
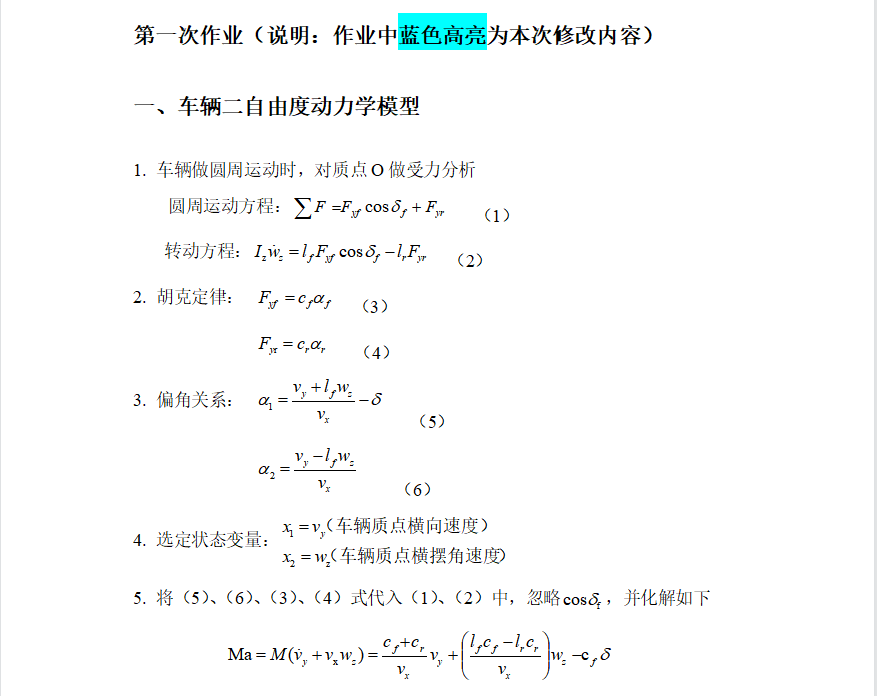
对于没有控制理论基础的学员,没有开发语言基础,从《自动驾驶控制算法阶段一》训练营开始,夯实理论基础,熟悉Matlab/simulink开发环境,建立车辆动力学模型。
完成阶段一的课程学习并完成项目作业,就可以顺利进入阶段二的课程学习,进行具体横纵向控制功能模型开发和仿真。
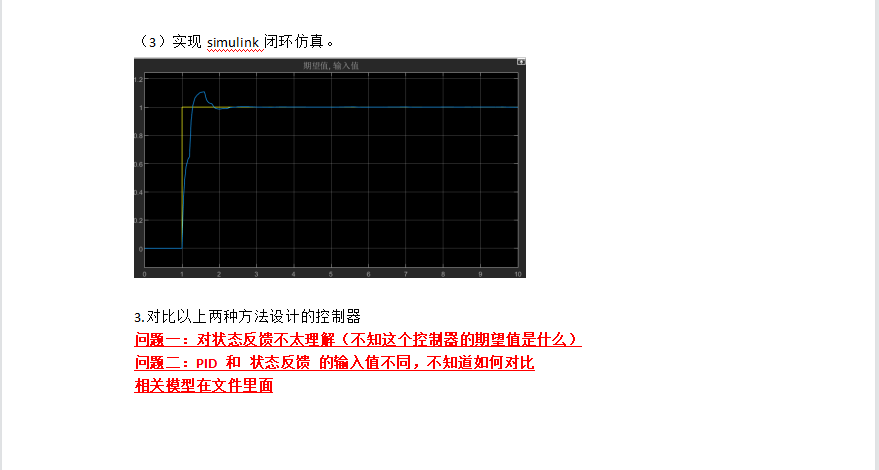 及时完成项目作业,发现问题并改进
及时完成项目作业,发现问题并改进
具备什么基础可以进入阶段一训练营课程学习?
汽车行业、理工科背景、高等数学基础,有一定语言基础学起来更轻松。
“我的专业是法学,没有任何编程基础,数学基础一般,有合适我的无人驾驶课程吗?”
难道已经内卷到文科生想来做自动驾驶了吗?是的没错,这是真实的问班学员的背景。
这类学员,大多是被我们劝退!不是课程不可以学,而是对于转岗就业来说,仅学习兴趣是不够的,更需要非常强大的自我学习能力与驱动力,对于非相关专业的学员来说,要补的基础会更多、更难,数学基础、汽车行业知识、控制理论、编程基础等等,暂不说能不能学得会,能不能坚持就是最大的未知数!
当然,对于坚定目标已经跃跃欲试想要从事自动驾驶控制算法开发的各位工程师们,《自动驾驶控制算法阶段一》训练营第3期来啦。
阶段一课程主要以开发语言MATLAB/Simulink和控制算法岗位必备的控制理论基础为主,能够建立动力学模型,进行LKA的开发。


录播课部分:
MATLAB电子系统开发与建模
车道保持辅助系统(LKA)的开发
自动驾驶研发必备控制理论
车辆动力学和运动学模型搭建
直播课部分:
自动驾驶规划与控制技术解析
基于模型的开发方法与应用案例
车辆动力学模型应用案例
自动驾驶常用经典与现代控制理论大串讲
自动驾驶无保护左转对比分析
1.致力于从事自动驾驶控制研发的在校生;
2.从事自动驾驶控制算法相关领域的研发工程师、系统工程师;
3.想要转岗从事自动驾驶控制算法的工程师
直播授课:采用线上直播授课,及时高效地沟通互动解决问题
班级群答疑:专属班级群及时解答、互动交流
项目辅导、批改:助教老师批改、点评作业,指出问题,解决问题
丰富的学习材料:提供直播课课件+提供补充学习资料,以及学习路径建议
学习周期:学习周期1个月,答疑服务有效期1年
直播主讲老师:刘老师,负责直播授课和答疑
清华大学博士,硕士生导师,具备丰富的一线项目开发经验和教学经验,作为首席技术专家为国内多个汽车技术公司服务过。
助教老师:姜老师,负责作业批改和答疑
清华大学苏州汽车研究院高级工程师,清研车联技术培训专家
1.掌握基本开发工具:MATLAB/Simulink,以及基于模型的开发方法;
2.能够使用Simulink设计控制器,使用simulink和sateflow等开发模块开发控制模型和状态机;
3.掌握基本控制理论、车辆建模方法,利用PID算法对车辆二自由度模型进行仿真;
4.了解ADAS常见功能的开发、仿真环节
完成训练营课程学习,并通过项目作业考核,可以获得清华大学苏州汽车研究院认证的证书,为面试添分加彩。
扫码添加Ella老师微信,获取报名优惠

