1.ComM和其他模块交互时序分析
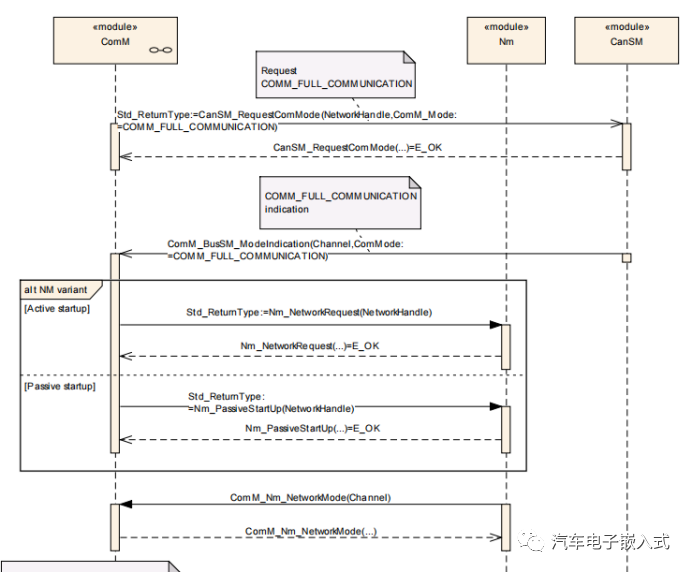
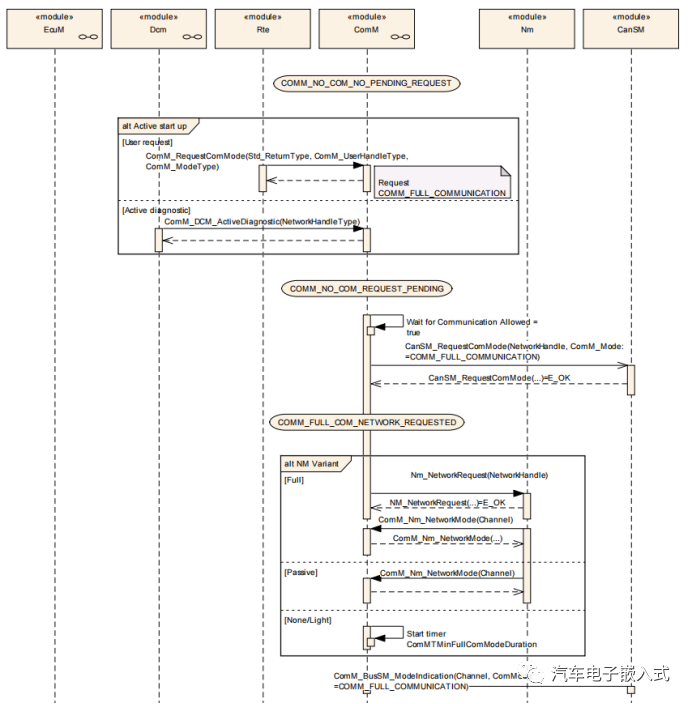
ComM模块调用CanSM_Request请求CanSM开启CAN通信,CanSM开启通信后调用ComM_BusSM_ModeIndication通知到ComM当前CAN通道Channel已经切换到COMM_FULL_COMMUNICATION状态了。ComM随后调用CanNM模块的Nm_NetworkRequest或者Nm_PassiveStartup接口开启该通道的网络管理。
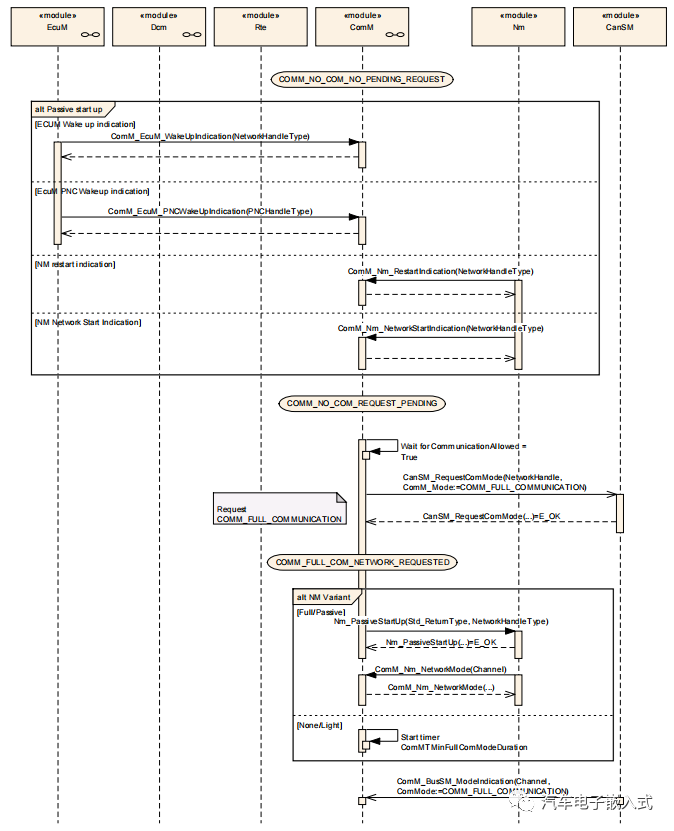
EcuM调用ComM_EcuM_WakeUpIndication通知到ComM模块ECU被唤醒,CanNM模块调用ComM_Nm_RestartIndication通知到ComM网络管理模块重启网络,随后NM调用ComM_Nm_NetworkStartIndication通知到ComM网络管理模块开始网络管理。ComM模块中CAN通道的状态从COMM_NO_COM_NO_PENDING_REQUEST切换到COMM_NO_COM_REQUEST_PENDING状态。ComM模块等待运行通信标志CommunicationAllowed=TRUE。允许通信后,ComM模块调用CanSM_RequestComMode请求COMM_FULL_COMMUNICATION通信。CanSM开启通道的通信后,ComM模块通道切换到COMM_FULL_COM_NETWORK_REQUESTED状态。随后,ComM模块调用Nm_PassiveStartUp请求NM被动开启网络管理,NM也调用ComM_Nm_NetworkMode通知到ComM当前NM的网络模式。
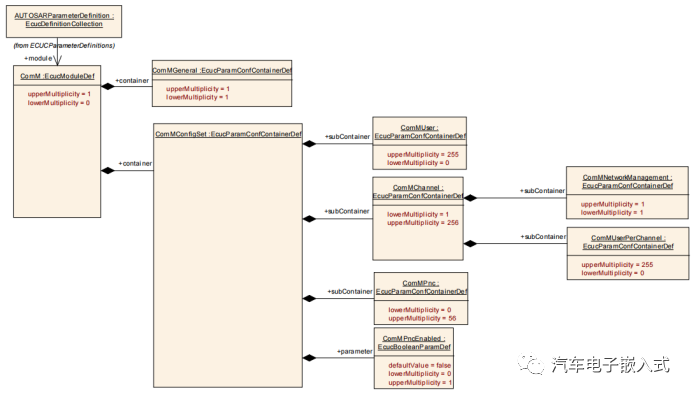
ComM配置ComMConfigSet和ComMGeneral两个顶层Container。
ComMConfigSet: 包含子配置参数Container。
ComMGeneral: ComM模块的通用配置参数。
ComMGeneral主要包含ComM的一些通用配置。
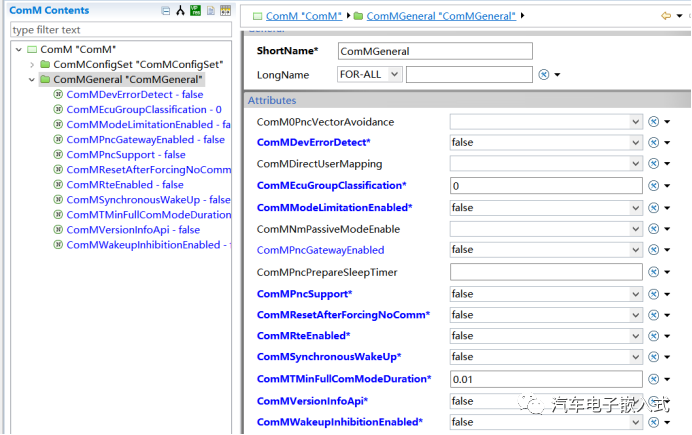
ComMDirectUserMapping: 配置是否让工具自动为每个ComMChannel映射ComMUser句柄(handler)。
ComMEcuGroupClassification: 配置模式抑制(mode inhibition)是否会影响到ECU。
ComMModeLimitationEnabled: 配置模式限制(mode limitation)是否被使能(enable or disable)。
ComMPncGatewayEnabled: 局部网络网关是否被使能。
ComMPncPrepareSleepTimer: COMM_PNC_PREPARE_SLEEP状态下定时器限值(以秒为计数单位)。
ComMPncSupport: 配置是否支持局部网络功能。
ComMResetAfterForcingNoComm: 配置ComM进入到无通信状态后ComM模块是否进行重启。
ComMSynchronousWakeUp: 配置是否支持通道同步唤醒(一个通道被唤醒则所有通道就被唤醒)。
ComMTMinFullComModeDuration: 配置COMM_FULL_COMMUNICATION状态的COMM_FULL_COM_NETWORK_REQUESTED子状态下最小的时间周期(以秒为单位)。
ComMWakeupInhibitionEnabled: 配置是否支持唤醒抑制(wake up inhibition)功能。
ComMConfigSet主要包括以下三个配置container。
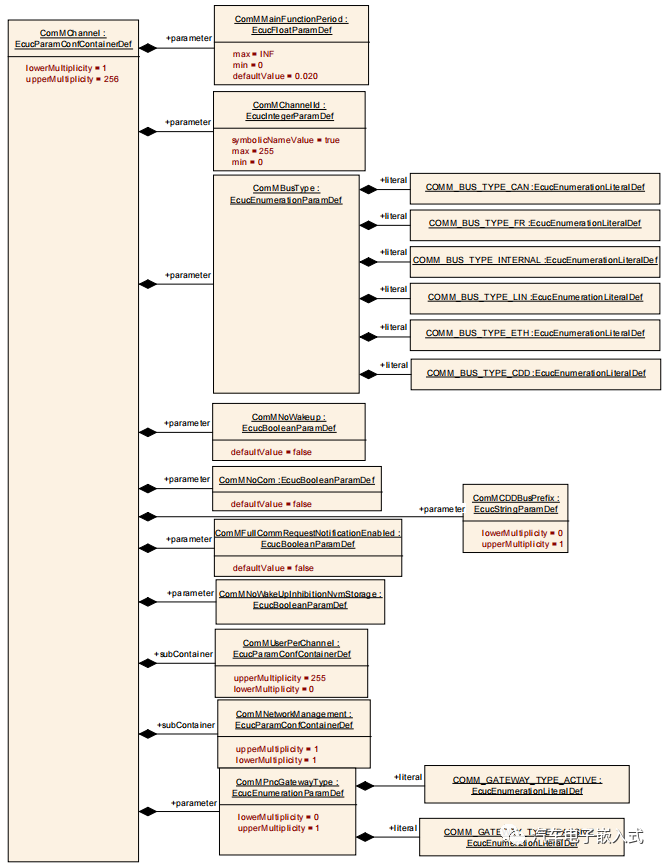
ComMChannel: 此容器包含总线通道的配置(参数)。信道参数应在整个通信堆栈内协调一致。
ComMPnc: 该容器包含部分网络集群(PNC)的配置。
ComMUser: 这个容器包含一个标识符列表,这些标识符用于引用系统中指定请求通信模式的用户。
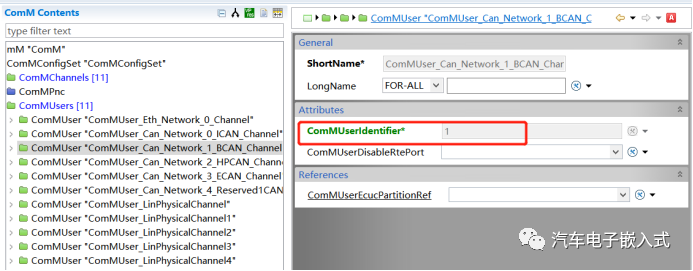
2.2.1 ComMUser
ComMUserIdentifier: 一种标识符,用于引用系统中指定请求通信模式的用户。ImplementationType: ComM_UserHandleType
用户的概念与ECU State Manager规范中的请求者的概念非常相似。
ComMUserEcucPartitionRef: 表示请求程序在其中执行“EcucPartition”。当分区停止时,ComM中的通信请求将被取消,以避免由于分区停止而导致总线保持唤醒,这个参数基本不使用,也不配置。
此容器包含总线通道的配置(参数)。信道参数应在整个通信堆栈内协调一致。
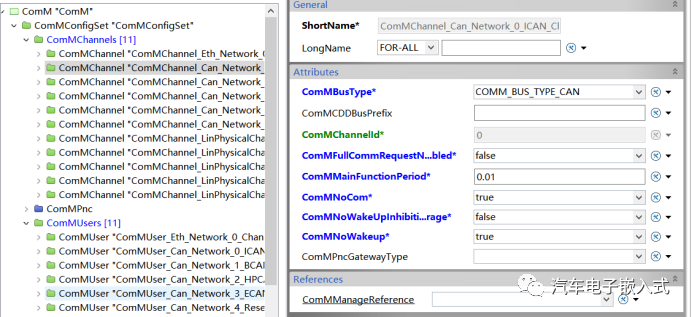
ComMBusType: 总线类型,包括:COMM_BUS_TYPE_CAN,COMM_BUS_TYPE_CDD,COMM_BUS_TYPE_ETH,COMM_BUS_TYPE_FR,COMM_BUS_TYPE_INTERNAL,COMM_BUS_TYPE_LIN六种类型。
ComMCDDBusPrefix: 调用复杂驱动(CDD)的API时需要加上的前缀。
ComMChannelId: 总线通道ID。
ComMFullCommRequestNotificationEnabled: 定义是否为该通道提供接口ComM_CurrentChannelRequest的可选SenderReceiver端口。
ComMMainFunctionPeriod: ComMMainFucntion调度周期。
ComMChannel: 配置是否允许切换ComM通道状态到COMM_SILENT_COMMUNICATION或者COMM_FULL_COMMUNICATION。在ECU运行时可以通过以下API改变这个配置参数。
ECU/All channels: ComM_LimitECUToNoComMode().
Separate channels: ComM_LimitChannelToNoComMode().
ComMNoWakeup: 配置ECU是否不允许唤醒该通道。
ComMNoWakeUpInhibitionNvmStorage: 如果该参数设置为true,则通道的NoWakeUp抑制状态将存储在ComMGlobalNvmBlockDescriptor所指向的块中(以某种具体实现的方式)。
ComMPncGatewayType: 定义该通道局部网络网关行为。
ComMNetworkManagement: ComMChannel的子Container,该容器包含网络管理的配置参数。
ComMUserPerChannel: ComMChannel的子Container,这个容器包含一个标识符列表,这些标识符用于引用链接到通道的系统中的用户。
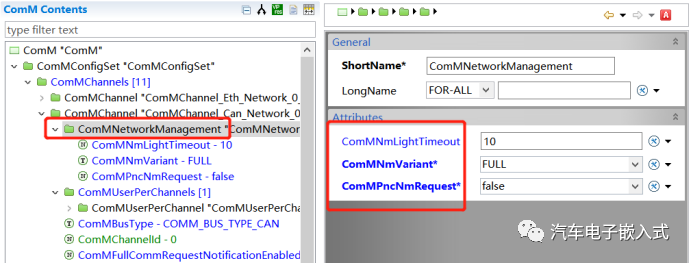
ComMNmLightTimeout: 定义COMM_FULL_COMMUNICATION子状态COMM_FULL_COM_READY_SLEEP离开后的超时时间(秒)。仅在ComMNmVariant配置为Light时使用。
ComMNmVariant: 定义网络管理的功能。应与NM配置相协调。
FULL: AUTOSAR NM可用(默认)。
LIGHT: 没有AUTOSAR NM可用,但有关闭通道的功能。
NONE: 不使用NM网络管理。
PASSIVE: AUTOSAR NM运行在被动模式可用。
如果ComMBusType = COMM_BUS_TYPE_INTERNAL则 ComMNmVariant应该被配置为NONE。
ComMPncNmRequest: 如果这个参数等于true,那么每次由于PNC状态机改变为COMM_PNC_REQUESTED而请求FULL Communication时,Nm将使用API Nm_NetworkRequest调用。

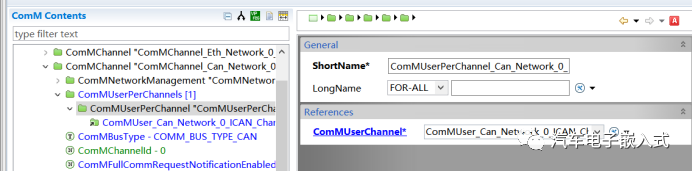
ComMUserPerChannel: 引用此通道用户对应的ComMUser。
ComMPncId: 定义局部网络ID
ComMChannelPerPnc: 局部网络中的ComMChannel。
ComMPncEthIfSwitchPortGroupRef: 引用与此PNC对应的PortGroups。
ComMUserPerPnc: 参考与此PNC对应的ComMUsers。
ComMPncComSignal: 表示PNC通信信号,用于通信该PNC的EIRA和ERA状态。
AUTOSAR模块的代码结构在Autosar架构下的模块详细设计及代码实现--基于配置的编程方法一文中我们有阐述。
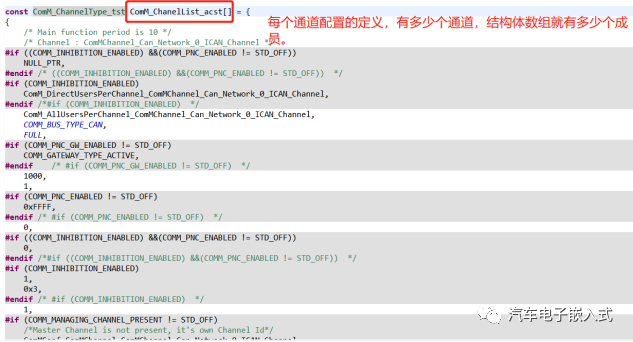
(1)配置代码
配置项结构体:
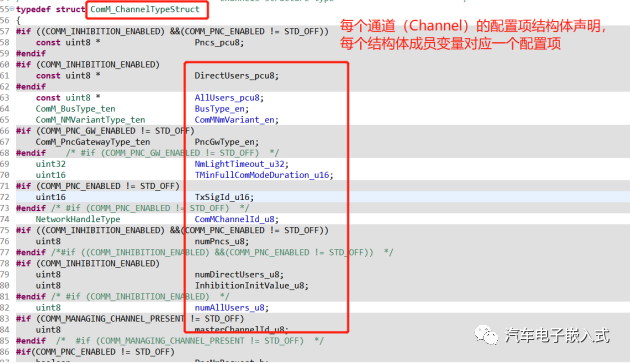
在ComM_PBcfg.c里面定义了每一个通道配置的具体实现。
(2)模块的实时状态数据结构
每个通道都会有一个实时的状态机,以及一些运行中的实时状态,这些状态一般保存在一个全局数据结构当中。
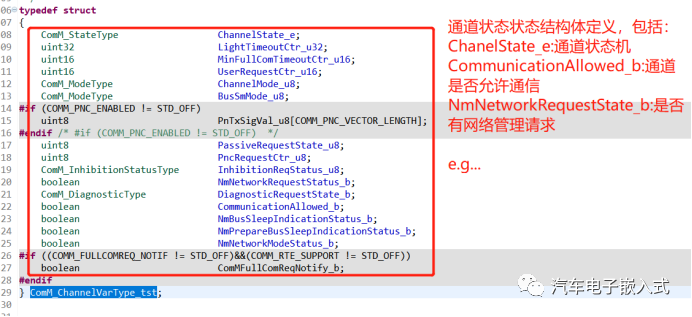
ComM.c中

这些全局变量是我们在调试ComM的时候需要观测的重要数据结构,通常在排查问题的时候,我们仅仅需要观测这几个全局变量。
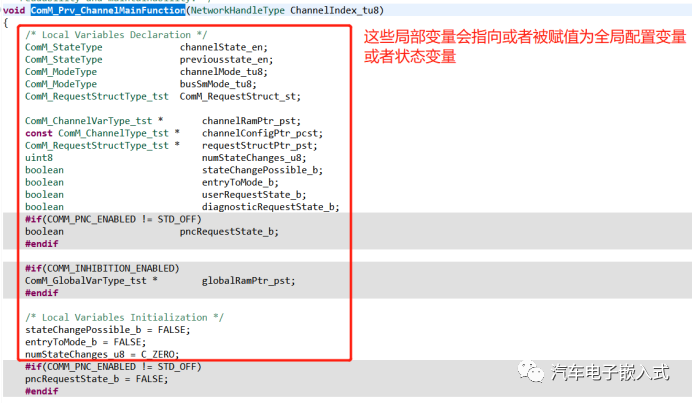
ComM_Main.c
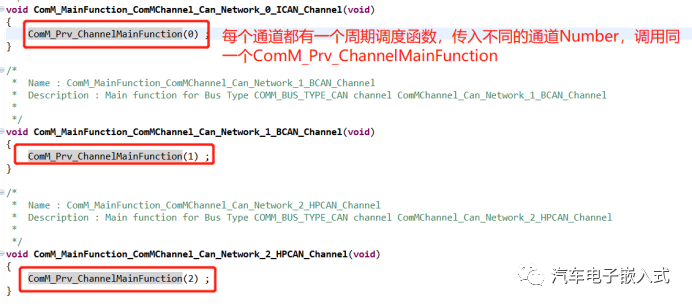
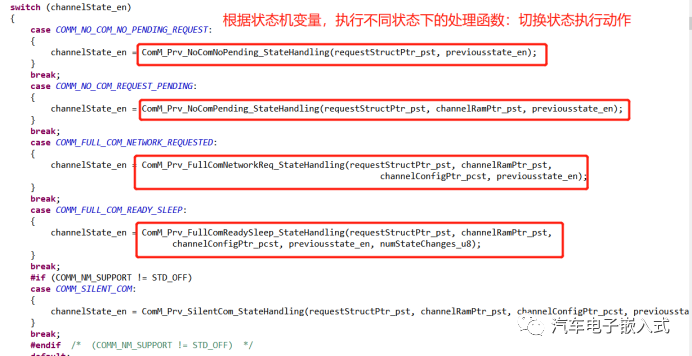
ComM_Prv_ChannelMainFunction函数中的逻辑一句话概括就是:根据配置走不同的分支,根据实时请求切换状态并执行响应动作。
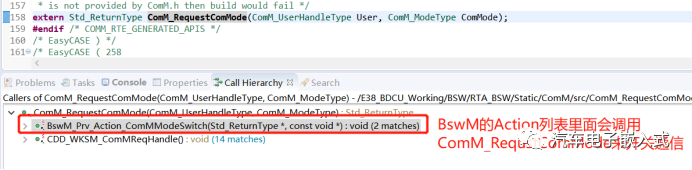
ComM.h中声明了所有的接口函数


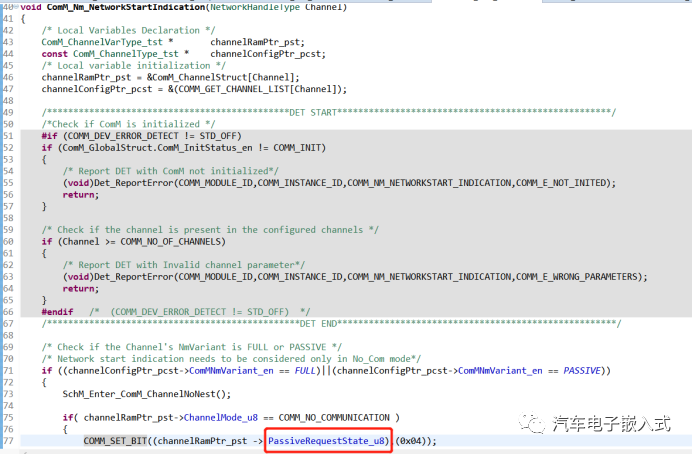
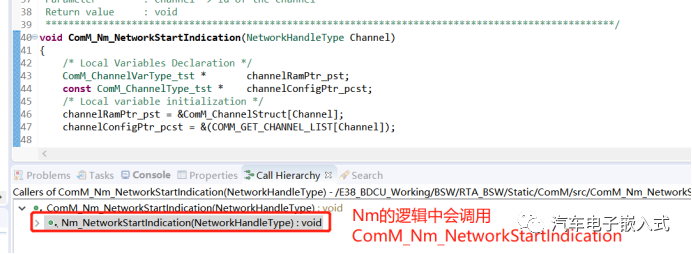
同理,ComM_Nm.h中声明了Indication函数ComM_Nm_NetworkStartIndication,ComM_Nm_NetworkStartIndication.c文件中定义了ComM_Nm_NetworkStartIndication函数。
ComM_Nm_NetworkStartIndication函数最主要的就是根据配置,更新通道状态结构体变量中的PassiveRequestState_u8变量。
分享不易,恳请点个【👍】和【在看】
