在摄影领域和战场一样,一切恐惧都是来源于火力不足,摄影太拉跨无疑是太穷,如果你拍的片子还不行,大概率是模特丑。

今天在淘宝买了20块钱零件以后,突然看见了智云Lab的稳定器,跑进去看了看,感觉真会给自己算法起名字,蜂巢第八代,好家伙,牛逼。退出来以后,淘宝以为我可以买得起一样,立刻马上给我安排了DJI的产品,看了看以后,感觉也很牛逼。去官网一看,好家伙儿,泰山算法???
要是我开发,我就写,Superstaby,然后就是plus,plus pro,pro star,最后来个To a force。
不过让我眼前一亮的是可编程性,唠着我不困了哈!
牛啊,果然有钱啥也有,不知道剧组缺程序员不
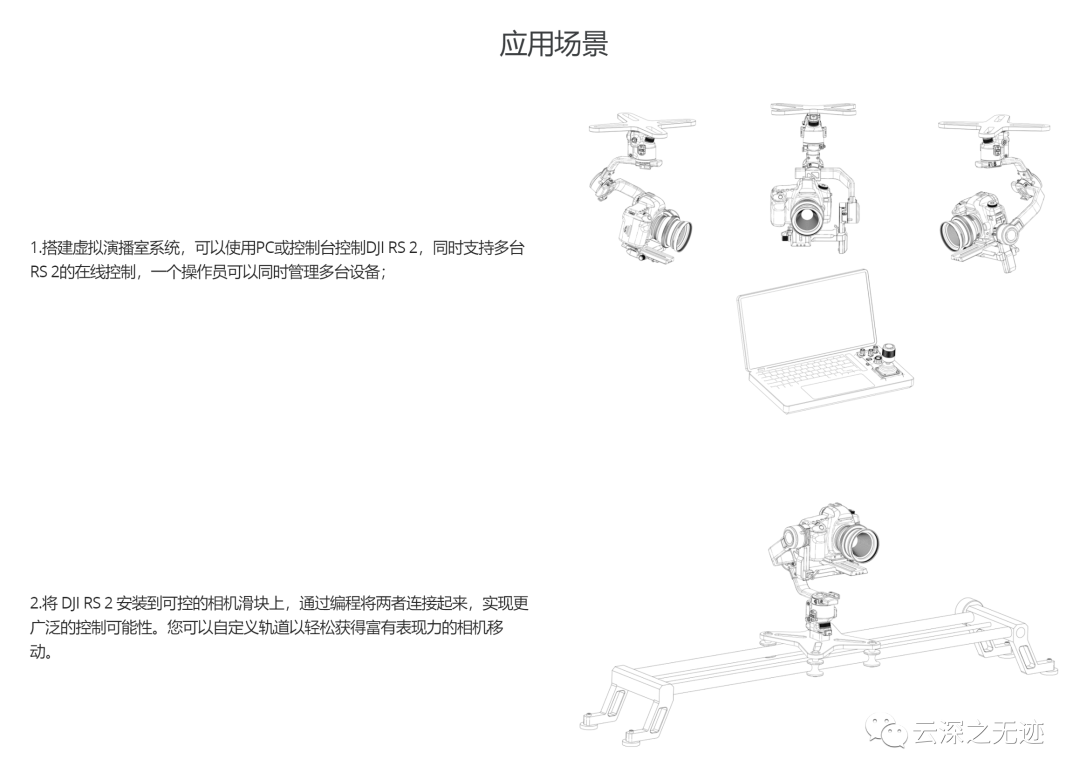
官方描述的两种有张力的使用场景
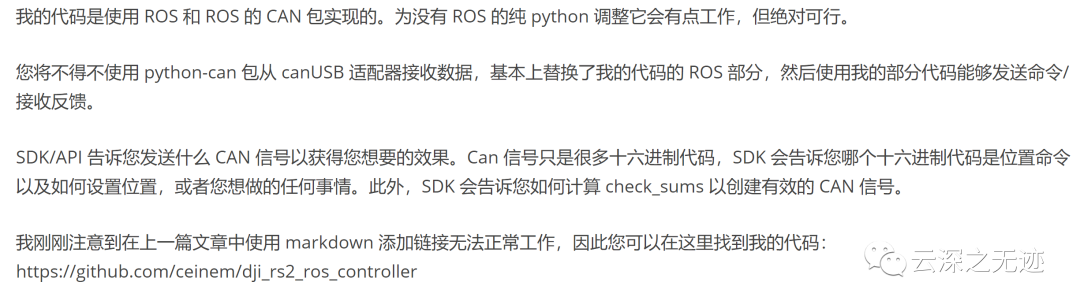
在论坛也找到了一个ROS的包

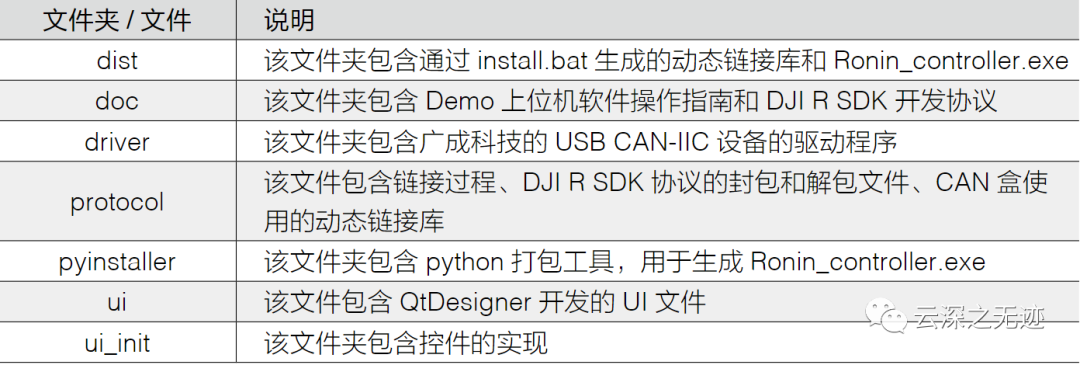
找个就是目前有的资料
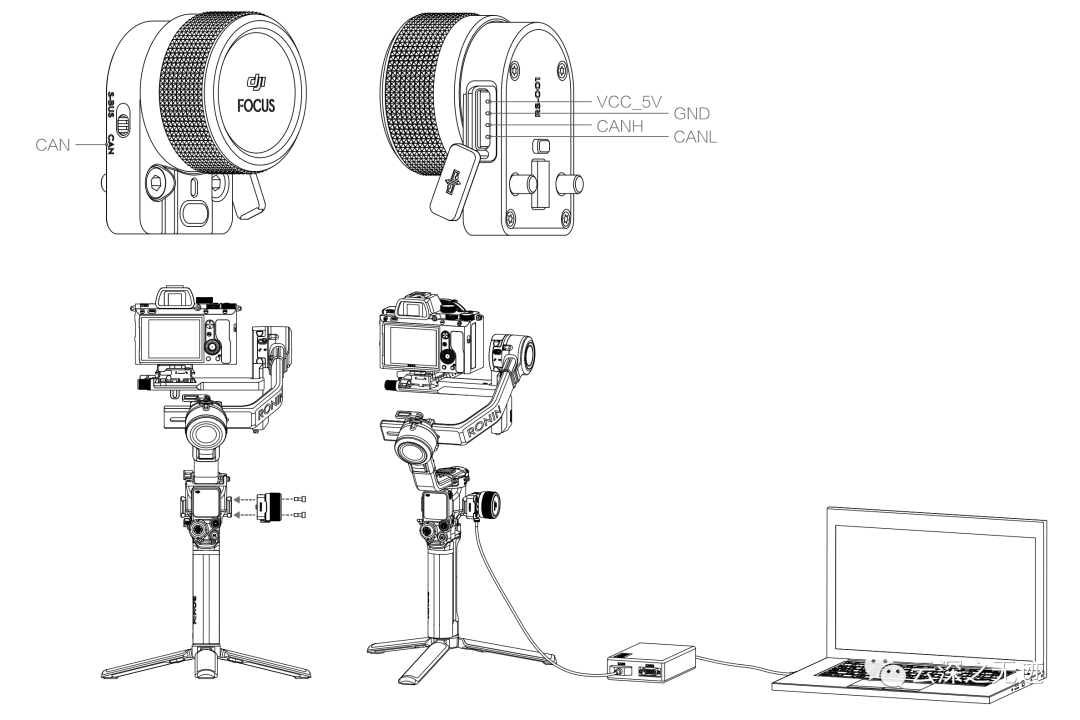
使用的时候需要有跟焦轮
也可以使用RSA连接
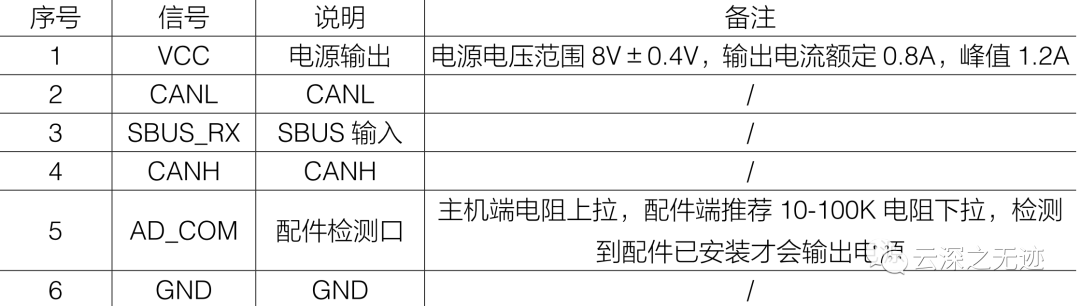
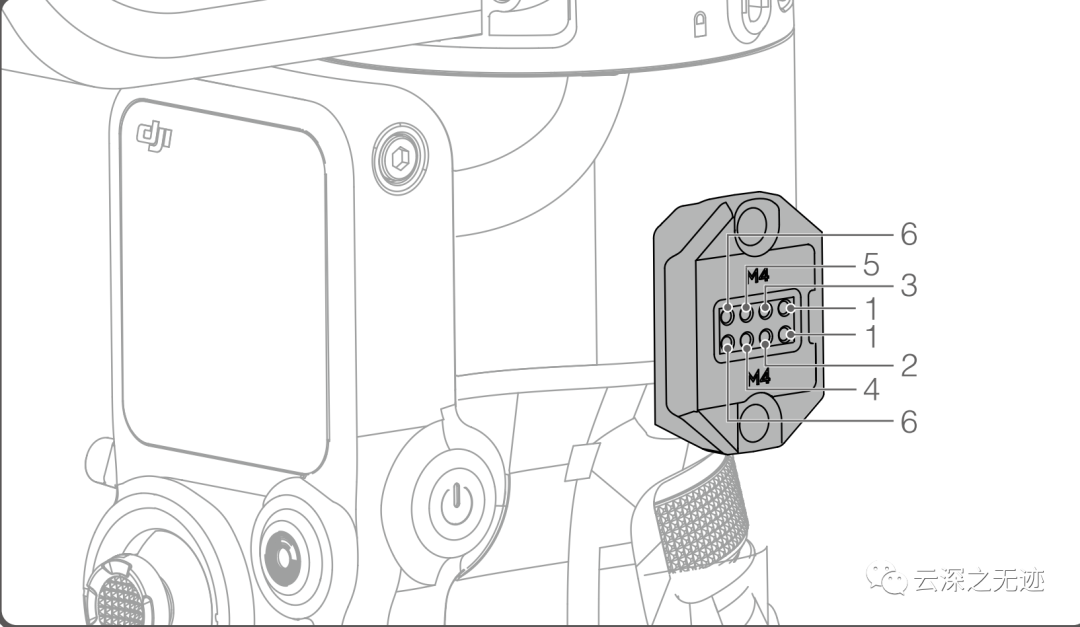
有SBUS接口,还有CAN,我不知道为什么老是使用CAN
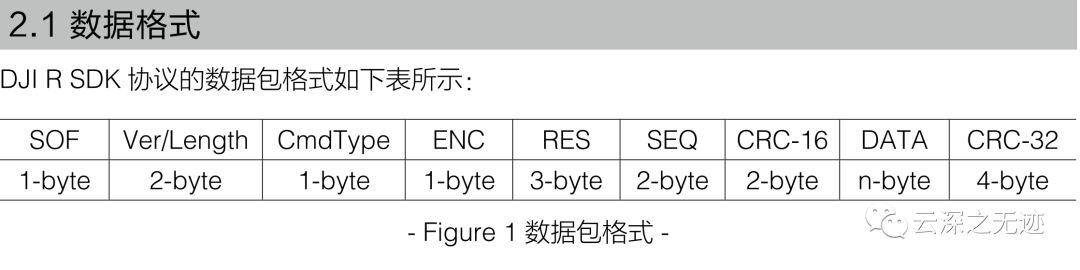
数据帧格式
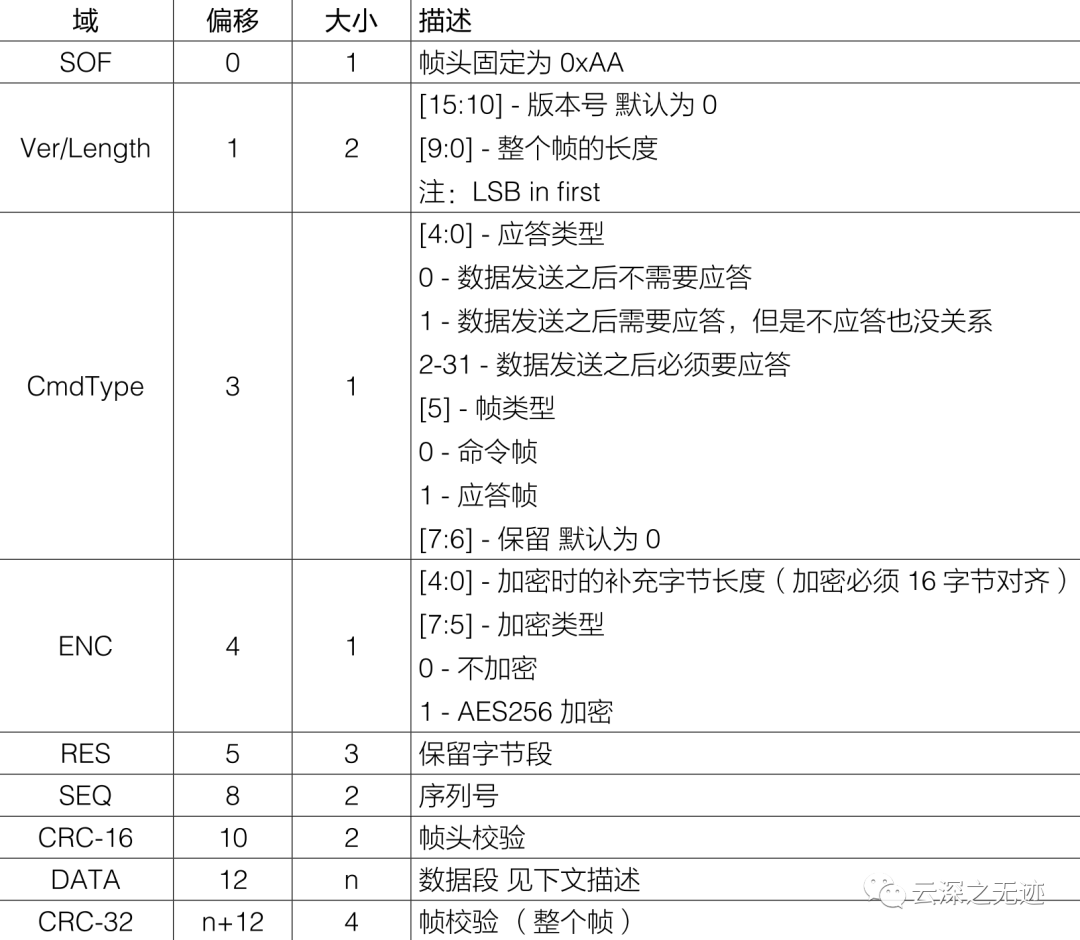
解释
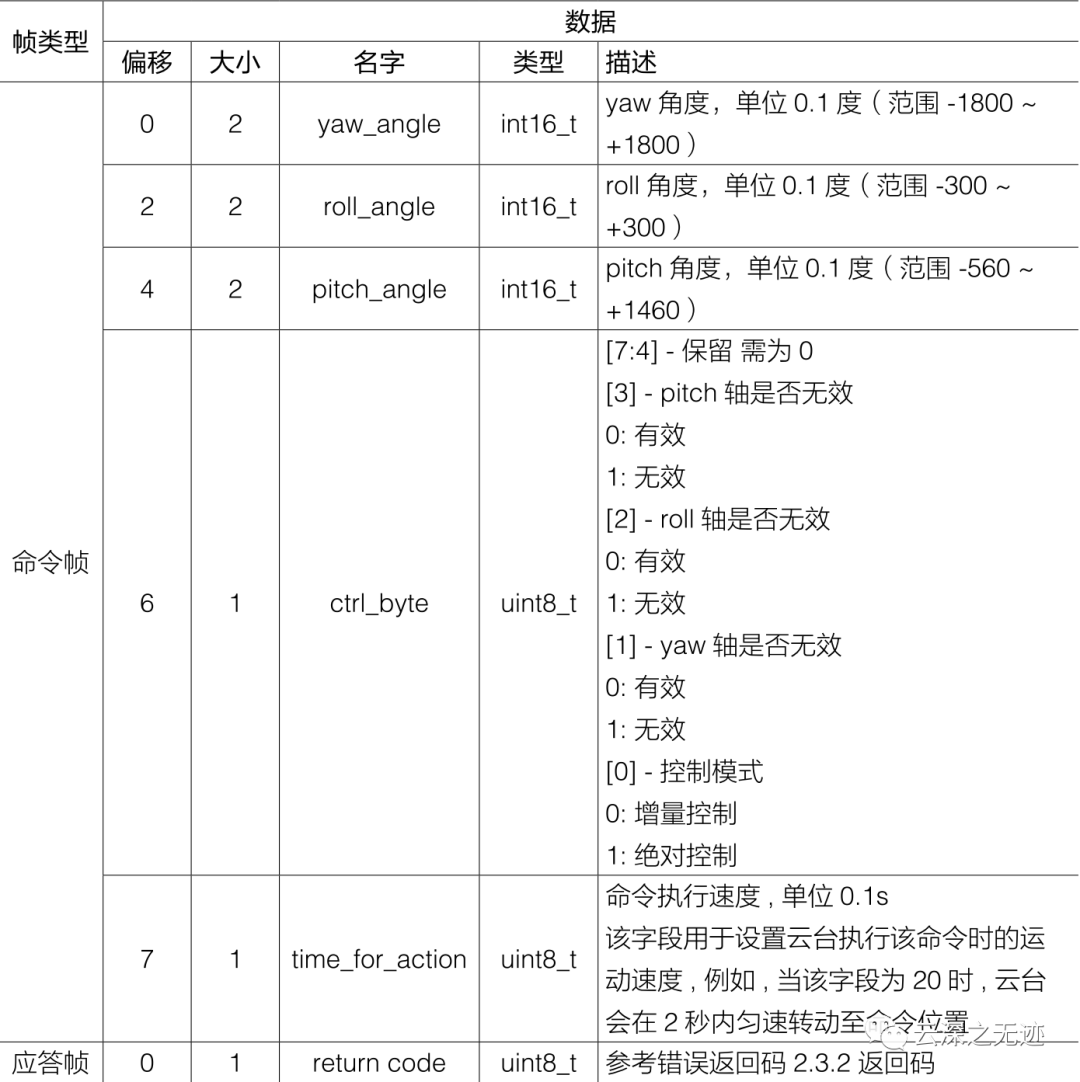
手持云台位置的获取
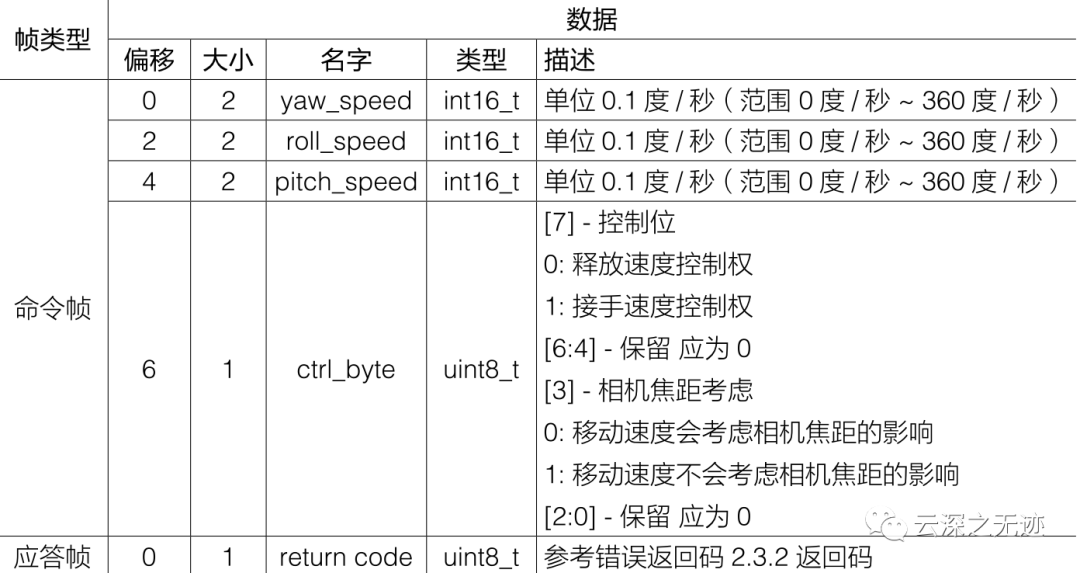
速度控制
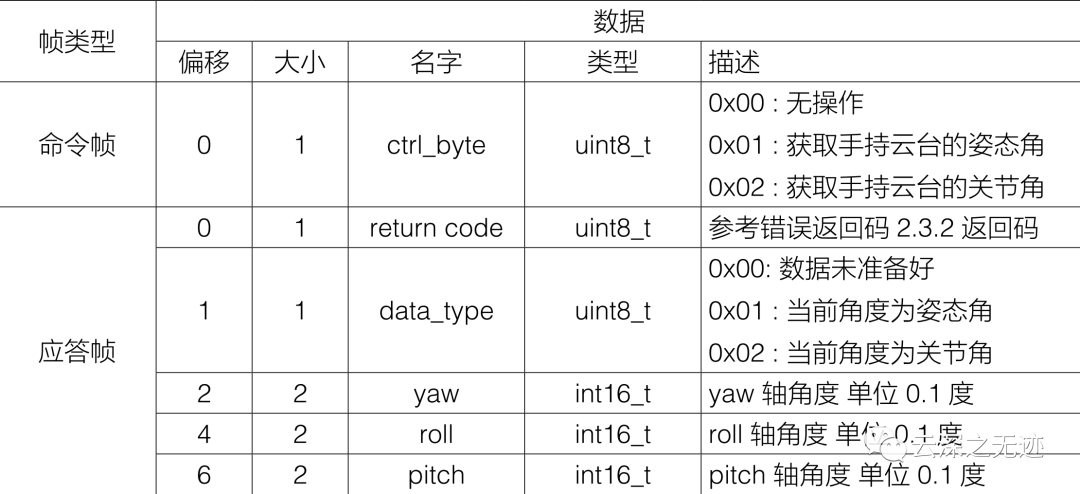
获取手持云台的信息
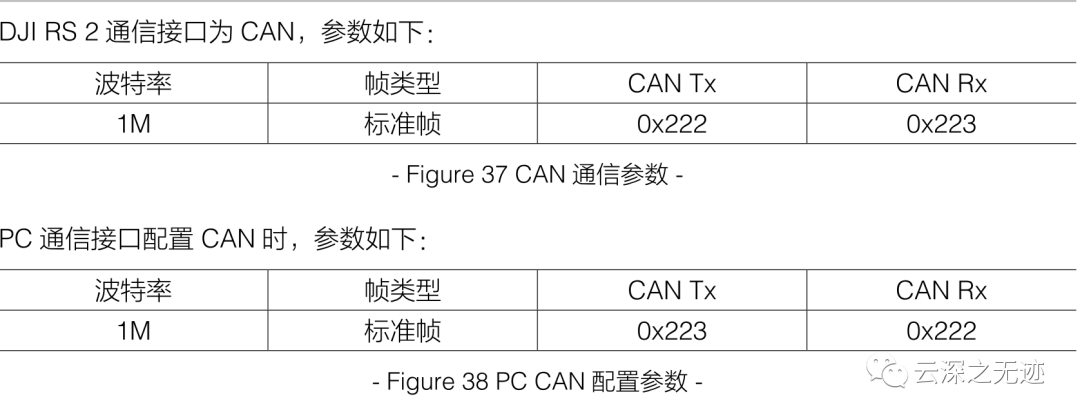
硬件支持
里面命令很全面,我单纯的罗列是没有意思的,按需查看。
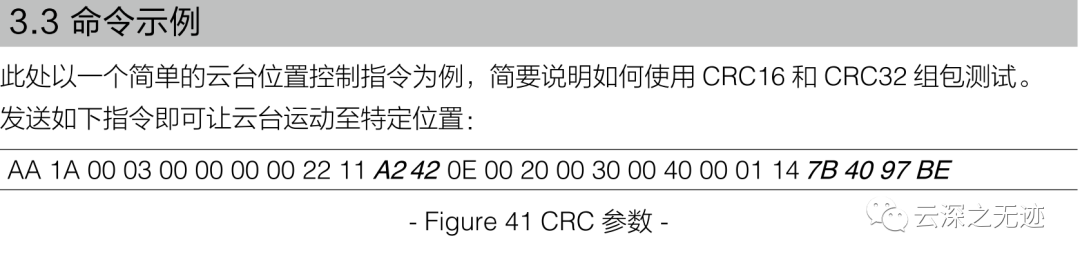
发送的命令是加密的CRC,不是明文SDK
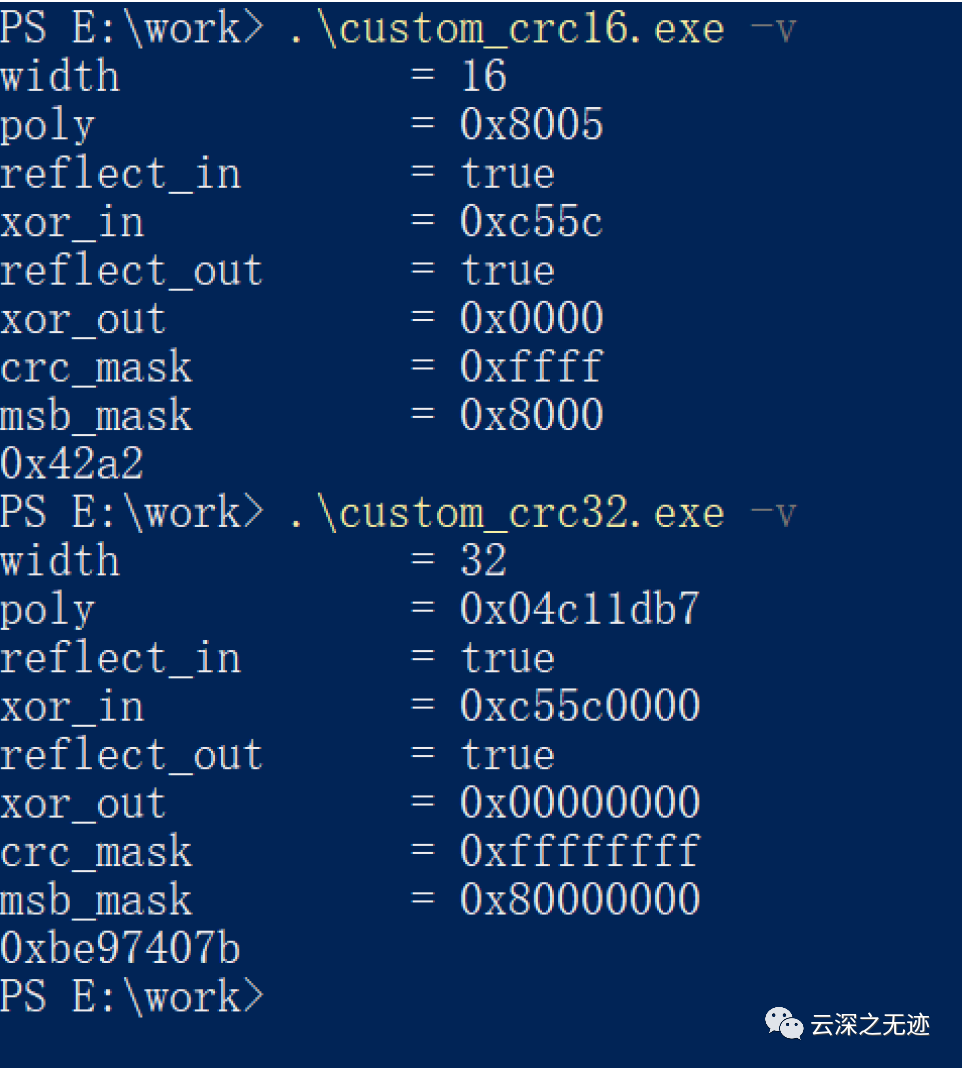
编译出的命令

使用了这个个开源库
CRC 算法可以选择从快速但占用空间的实现到较慢但较小的版本,特别适用于嵌入式应用程序。
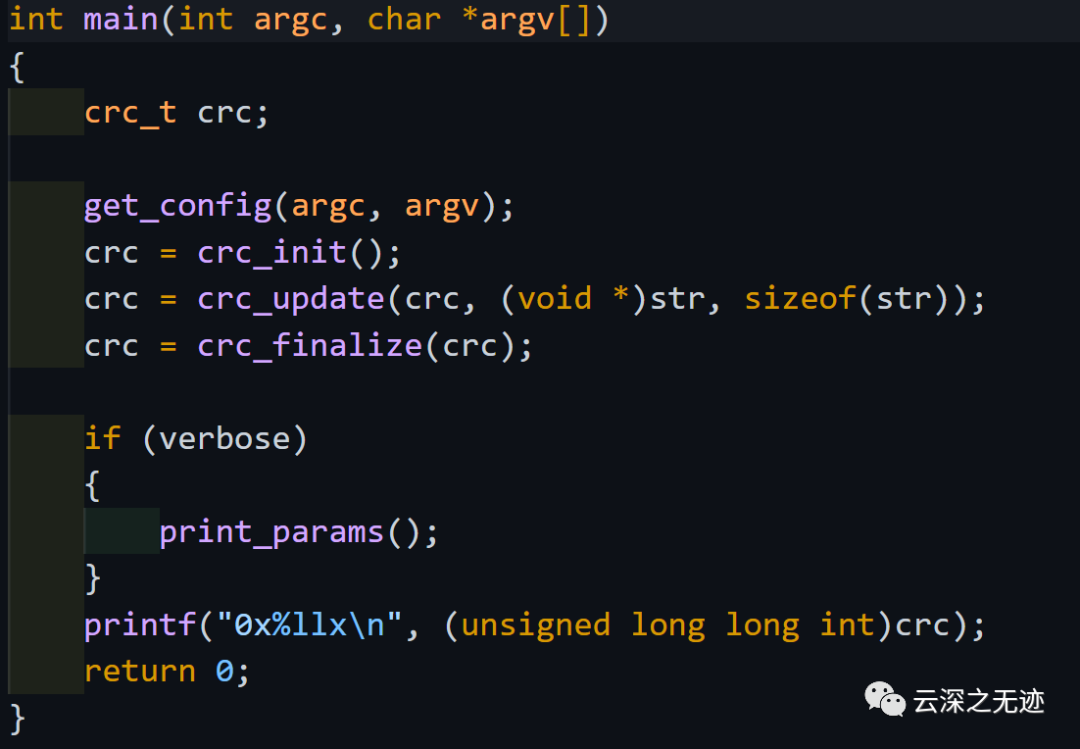
这就是一个主程序,只是计算CRC的代码
还有一个是上位机的demo,还挺有意思的。
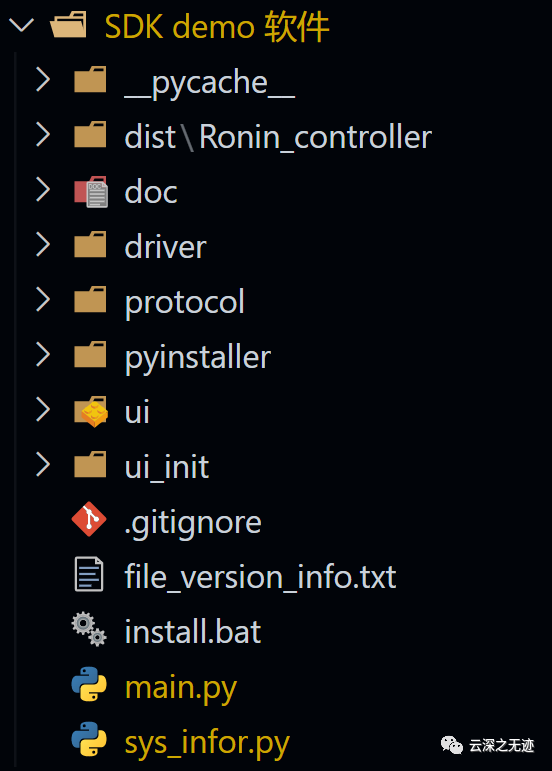


已经有编译好的EXE文件,支持ZLG的CAN设备
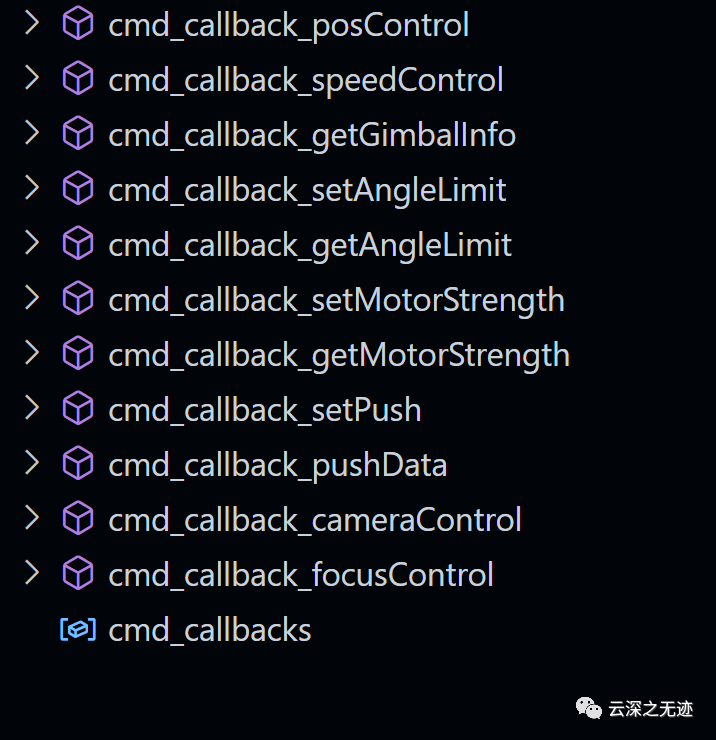
命令都是使用回调实现的
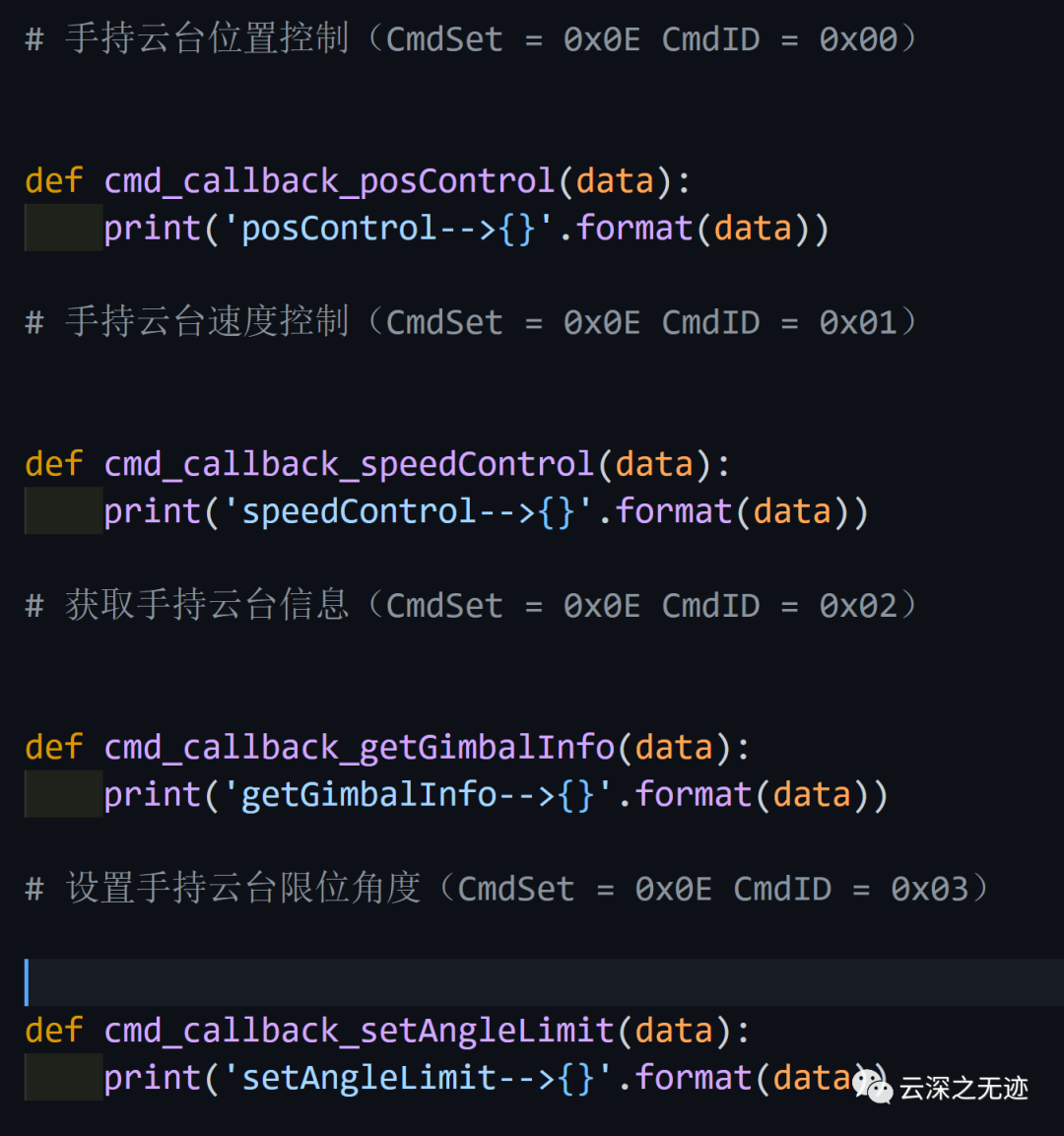
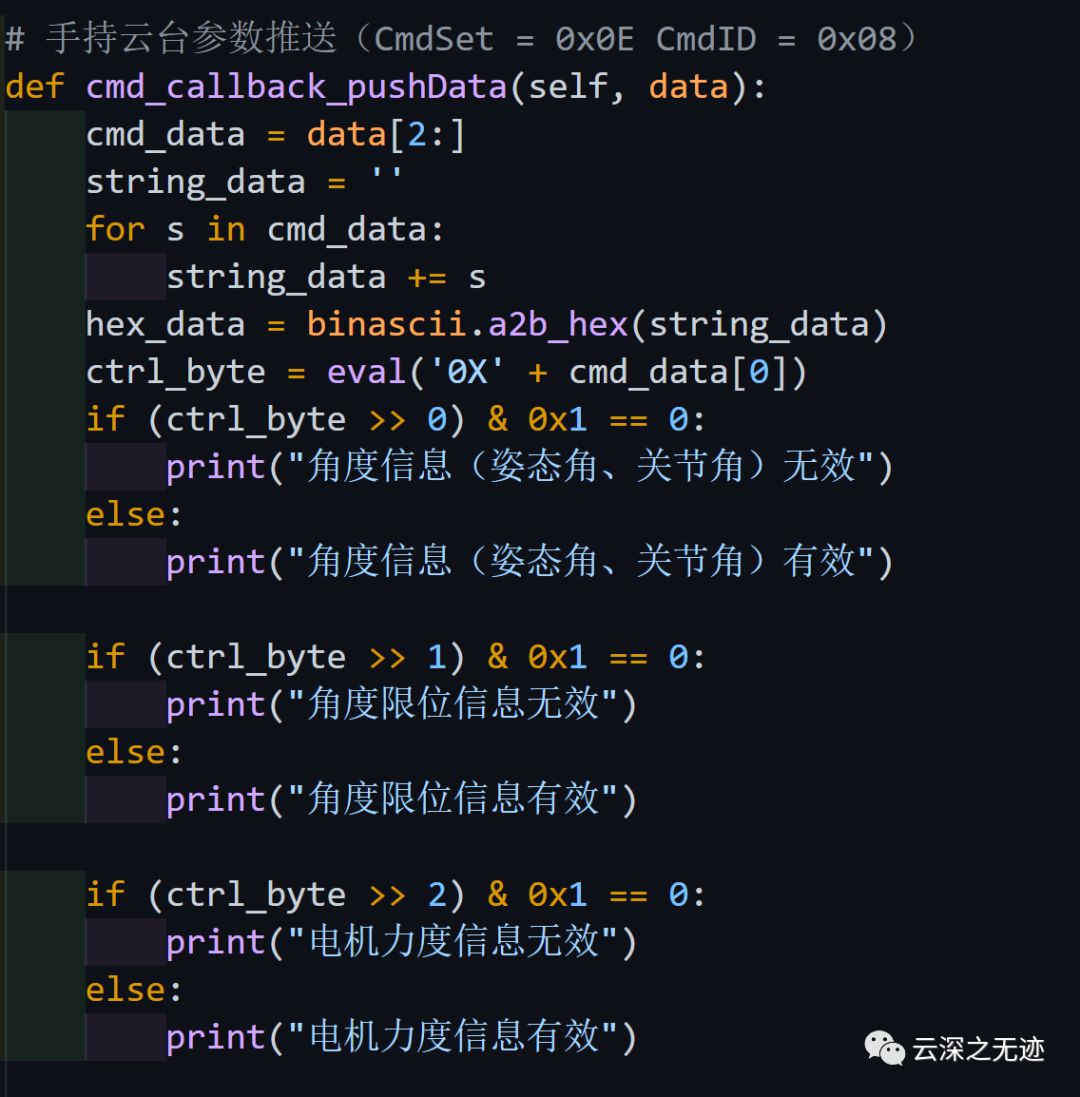
具体的代码样子
这个是输出的UI的后台函数

主函数
虽然东西贵,但是可玩性高,有机会要借一台试试。

https://www.dji.com/rs-2?site=brandsite&from=mobile_navhttps://pycrc.org/