近日,图漾科技正式发布面向“机器人+视觉”应用的软件开发平台Robot Vision Suite(RVS),以强大的软件功能、友好的图形化开发流程及开放的软件授权模式,极大降低手眼协同系统的开发难度,帮助集成商和开发者实现更多创新的机器人应用,进一步推动智能机器人和3D视觉的大规模普及化。

3D机器视觉是智能制造和高端自动化的核心技术单元之一,功能强大但开发难度高、开发者社区和软件资源也相对稀缺,导致了目前开发成本高、实施难度大、市场渗透率低的客观现状。过去两年里行业的增长速度虽然都在100%以上,但是以工业机器人保有量为基数计算的渗透率目前还只有0.5%左右,应用仅限于局部行业的零散场景,远没有到达大规模普及化应用的阶段,市场发展才刚刚起步,还有数十倍的成长空间。随着以图漾科技为代表的高性价比3D工业相机的日益成熟和普及,以及下游终端用户应用场景的不断涌现,当前行业发展的瓶颈集中体现在系统开发的门槛和开发者社区规模。为了突破这个障碍问题,行业迫切需要一款方便应用开发的软件平台,并需要同时满足如下所有条件:- 免费开放的授权模式,使得行业用户和开发者能够放心使用,用户在应用开发上的投入安全无风险;
- 强大的软件功能,丰富的视觉及机器人算法库以及AI支持,常见的系统开发所需资源完整且成熟稳定可靠;
- 支持简便快捷的图形化低代码开发流程,同时也可支持专业的二次开发以及私有算法扩展;
- 丰富的机器人和相机支持,并可方便扩展新的机器人和新的相机硬件;
- 操作系统和算力平台支持广泛,用户可按需灵活选择最佳性价比的计算平台。
图漾作为专业的独立视觉产品企业,致力于以核心零部件的商业模式,服务于多个行业的集成商合作伙伴。基于多年的研发和大量的实际部署案例验证,图漾的RVS软件已成为满足以上条件的工业软件平台。本次正式对外发布并以开放的授权合作模式,广泛欢迎行业内的各种合作伙伴,包括本体商、集成商、最终用户或研究机构等,即日起均可联系图漾科技申请并获取免费的使用授权。相信随着开发者社区的壮大,3D视觉和机器人的应用场景必将越来越丰富,市场规模越来越大,最终惠及全行业里的所有企业。 Robot Vision Suite(RVS)软件介绍
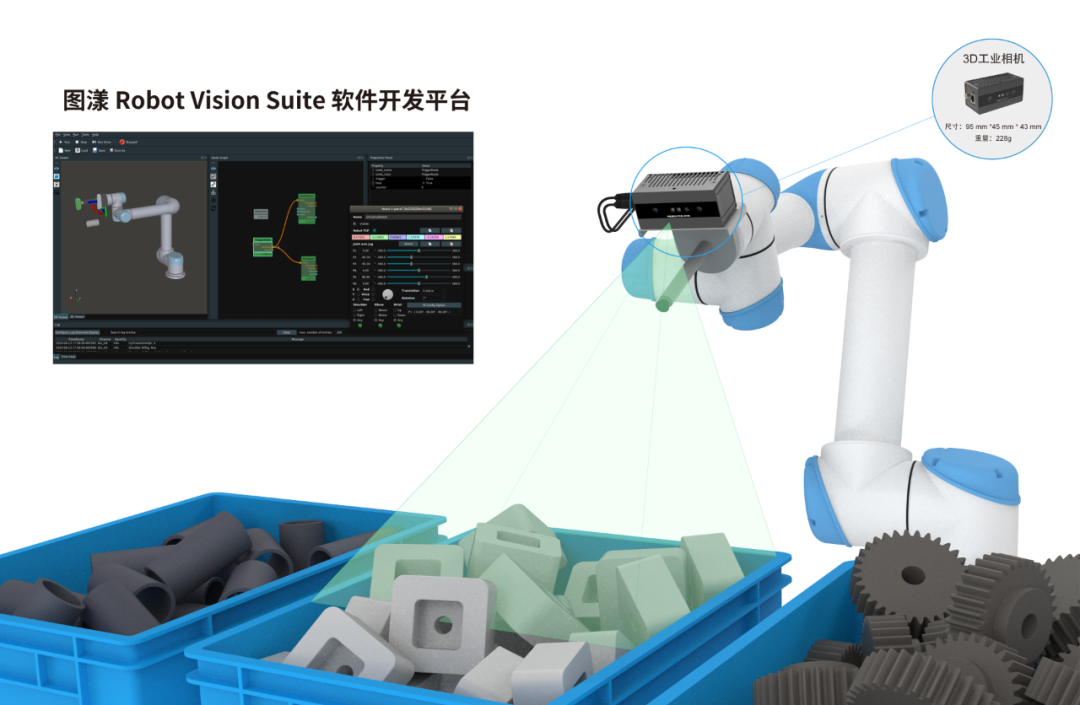
图漾RVS是一款针对“机器人+视觉”应用开发的图形化低代码软件开发平台,包含了大量的2D/3D视觉算法库、机器人运动规划库、手眼标定、机器人运动模拟仿真工具等完整功能,方便用户快速实现物体识别和分割、机器人引导、运动规划和手眼协同等应用开发。主要特点包括:
- 安装简便:支持docker部署和一键脚本安装的安装方式,提供适应主流平台的全套安装包及操作文档,最大限度降低操作难度;
- 丰富的视觉算法库:拥有130多个视觉算子单元、50多个软件功能包,包含了常用工业机器人接口节点、深度学习算法节点、手眼标定节点等,且在持续丰富扩展中,同时支持用户开发自己的算子进行集成;
- 低代码、流程式编程:算子块具有信号流和数据流双通道,通过拖拉算子块和算子之间的连线即可完成整套系统的逻辑架构,无需编写底层代码;
- 可视化交互:开发需求可通过更改调整模块的配置参数实现,并更新到正式环境,适合高度自动化、柔性化项目,并大幅减少开发时间及沟通成本;
- 高精度机器人仿真模拟:集成了工业仿真功能,支持3D人机协作,可1:1验证虚拟调试、节拍验证、效果评估及方案改进,可支持各种主流品牌工业机器人的运动轨迹仿真;
- 兼容图漾全系列3D相机:可在UI控制界面一键调整相机曝光模式、拍摄模式以及图像处理等,简化了相机使用规则,极大降低了开发门槛。并实现了一套软件连接多台相机(一拖多)的功能,大幅减少项目的算力成本;
- 高效的复用组件:在算子单元层次之上可实现更高层次的组件封装,类似的场景和应用可以复用成熟的通用流程组件,修改业务参数即可完成个性化的业务场景实施,同时实现开发难度的降低和开发效率的提高;
- 计算平台支持广泛:目前支持Linux操作系统(Windows版本即将发布),可支持无GPU的算力平台(机器人3D模拟仿真功能和部分AI算子需用到GPU)。
图漾科技专注于3D机器视觉产品的研发和应用,用极致性价比的3D工业相机和创新的应用软件组成丰富的行业解决方案,赋能各行各业的领先设备和集成商客户。
Robot Vision Suite机器人视觉软件开发平台现已公开发布,合作对象面向机器人本体、各行业的集成商、终端客户、研究及教育机构等。
从5月份开始,图漾将在全国多个城市举办机器人视觉开发培训和技术交流,更多产品和培训信息、以及软件合作或授权获取,请联系info@percipio.xyz。