


接上篇文章《奔驰NTG7座舱和HERMES3车联系统》,奔驰的T-box HERMES 3已经处在无线认证的末期,目前网上有的资料主要是HERMES2不同版本的说明,我想在本文讨论的问题是:T-box在发展过程中,除了加入V2X的连接功能之外,是否有独立存在的价值(这个在第二部分单独提出来)。
HERMES是一个缩写,全名是Hardware for Enhanced Remote,Mobility & Emergency Service,从第一代开始设计包括GSM、UMTS、LTE、USB、蓝牙和Wireless LAN。
▲图1. 独立进化的HERMES系列
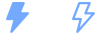
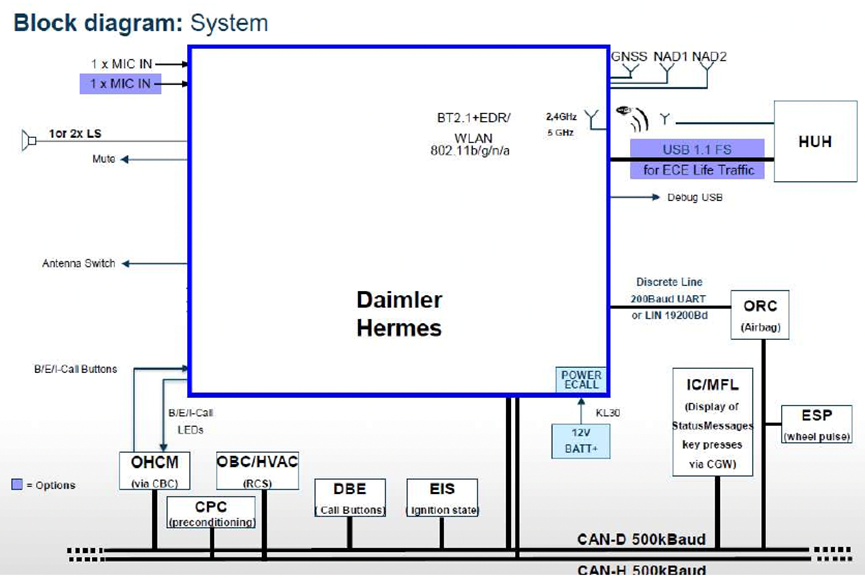
目前已有的信息部分,主要包括整个系统框图和T-box框图:
● HUH:Head Unit High(信息娱乐系统的主要组件)
● OHCM:面板包含 B/E/I 呼叫按钮(用于触发呼叫)和相应的 LED(用于呼叫指示)
● CPC/OBC/HVAC:车辆空调系统的组件
● DBE:面板输入电话号码
● EIS:点火状态信号
● IC:液晶仪表
● MFL:集成在方向盘中的控制元件
● ORC:安全气囊信号
● ESP:轮速信号
▲图2. HERMES 2.0系统框图
对于座舱来说,整体的车联网的主要传输是通过500k的CAN总线,还有一路无线WIFI连接,还有一个USB1.5的连接。
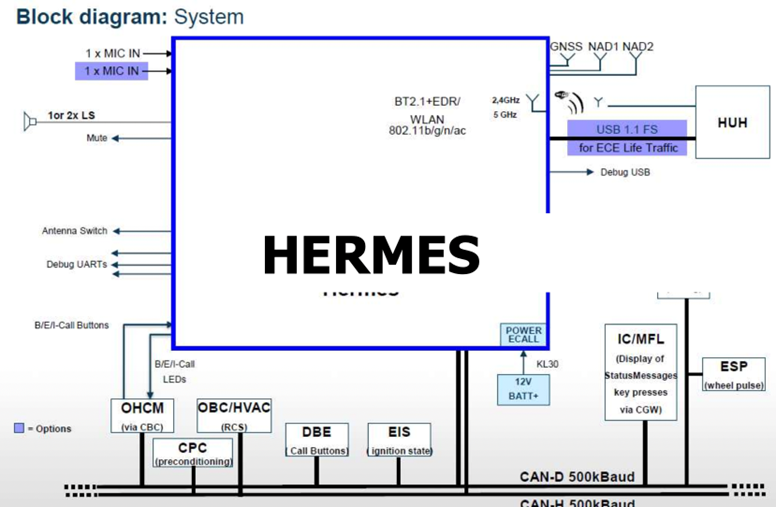
▲图3. T-box对智能座舱的支持
我们对比从1.5系统迭代到2.0,奔驰的系统设计从接口来看完全一致,这也是传统的做法,保持向前兼容。主要的功能包括为不同的远程信息处理服务提供网络访问,和提供E-Call(紧急呼叫)、R-Call(道路服务呼叫)、I-Call(信息呼叫)。
▲图4. HERMES 1.5 系统框图
在这个T-box里面,主要包括NAD模块,华为的模块(Networ Access Device Module), SOC Hisilicon Hi6932 (BB), Hi6559 (PMU), Hi6362 (RFIC) NAND FLASH 512MB, RAM 256MB,在这里是运行Linux的,主要针对两路NAD的连接天线,还有GNSS的部分,蓝牙和无线连接。
而主控的CoPilot是核心MCU SH726A @ 216MHz SPI Flash 2MB, RAM 1,25MB,这里从框图来看完成两路高速CAN,和Airbag的LIN连接,处理按键和电源诊断。
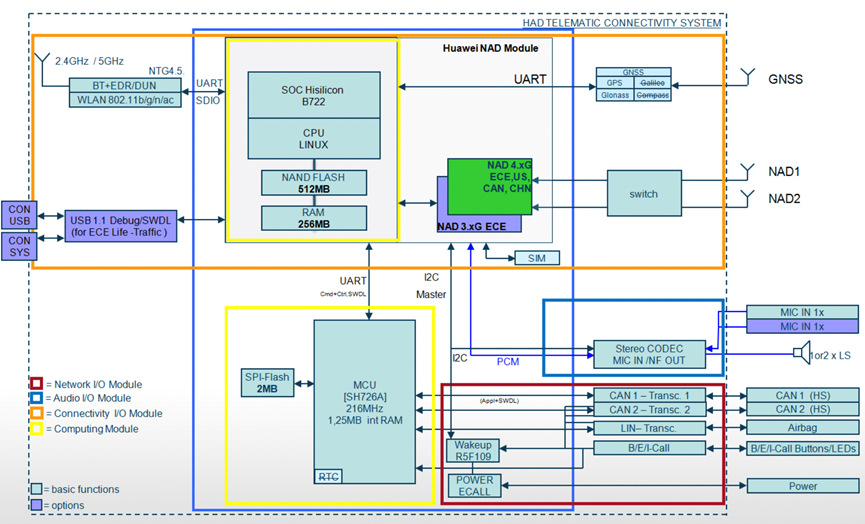
▲图5. HERMES 2.0 内部框图
MCU本身也没太多的工作,主要是和NAD串行通信,然后对一些简单外设和通信。
备注:传统汽车里面ECU里面的MCU感觉都是这种,没做太多工作
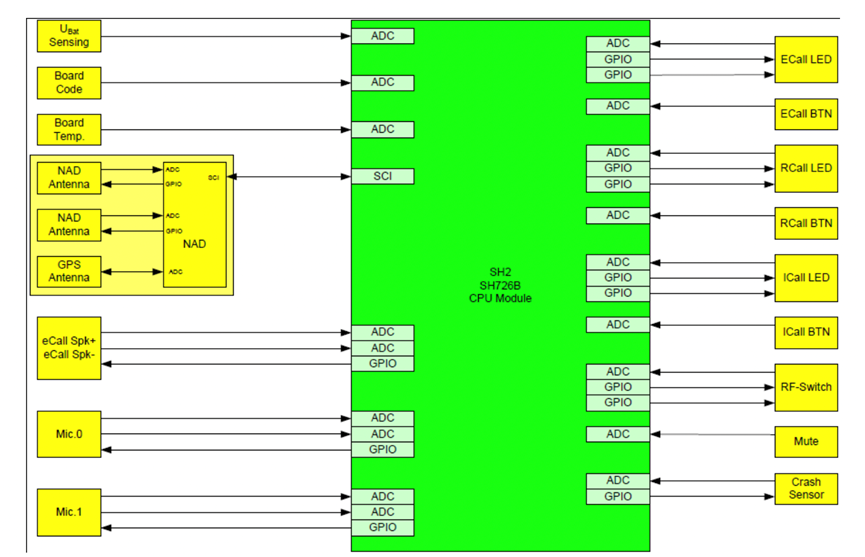
▲图6. MCU的采集框图
HERMES没有给出整体的框图,从结构来看应该是很一致的。
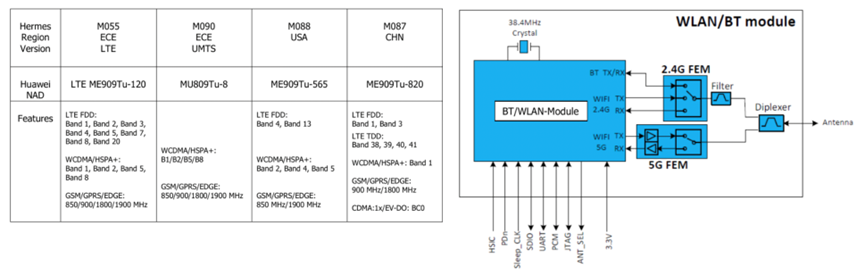
▲图7. HERMES 1.5的配置参考
由于功能安全对语音完整性的要求,这里给出了语音的路径。
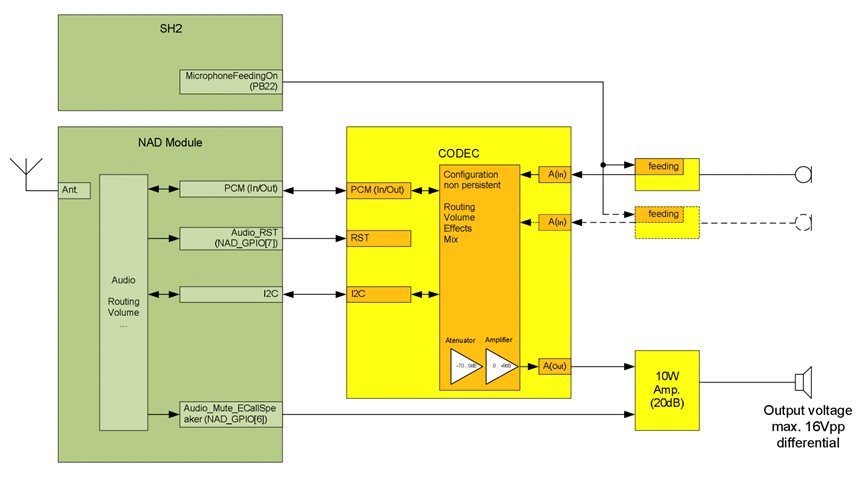
▲图8. 一个10W的功放
图9是上面这个T-box的正反两面的拆解图:华为的NAD模块,包含了多个芯片。
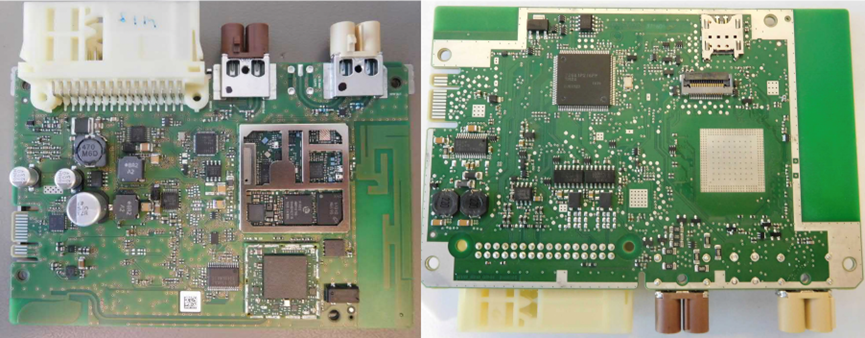
▲图9. HERMES2 的实物图
从分布式到集中化,如果把上述的NAD模块和无线蓝牙模块等等单独做一块类似特斯拉的单板,然后把这个板子和座舱主控做成叠层子板和主板的模式,整体是完全可以的。如果复用座舱主板里面的Co-pilot里面的MCU,实现HERMES里面的CAN通信,还有各式各样的连接,如果把Gateway直接放在里面去,整体来看很多事情可以简化。

▲图10. 特斯拉的集成化
我个人的看法:如果到了中央域控时代,类似于T-box这样的连接单元,如果不是出于EMC的复杂性考虑,肯定是被消亡的。
●NAD网络接入和无线连接模块被整合成一块可替换的单板
●软件层面被集中在域控的SOC里面,并且保留紧急的功能在MCU里面
从面向电气和结构的可靠性考虑,以后估计会有很多的主机设计,类似工控的考虑,如何在一个串行结构里面把这些板子设计好,实现维修和组装可插拔并且能够平衡好总成本。
小结:我的理解,很多线束的连接本身是分布式时代的产物。如果我们把这些核心功能进行整合,然后对系统功能进行剪裁,大量的MCU可以合并同类项,本身也是干着简单的活,相关的低压连接器和低压线束都能实现简化。
