汽车软件Boot程序的主要作用是刷新App程序。在在一个具体客户项目中,Boot也是客户需求的一部分,跟随项目也有软件开发计划(有的为了和其它Boot区分,把项目上的Boot称作CB, Customer Boot)。
对于已经下线盒盖的控制器,无论是在供应商或者客户手里测试,只能通过CB刷新App。如果需要CB自刷新,就需要额外的方法。
规范:
整车厂只有对App程序刷新的规范,没有对Boot自刷新的规范。因为规范是针对量产车的,售后只负责App程序的升级,不对Boot升级(也不允许Boot升级)。
所以,Boot的自刷新只存在于项目开发阶段,且由供应商自行提供方案。本文分析五种Boot自更新方式的优缺点。
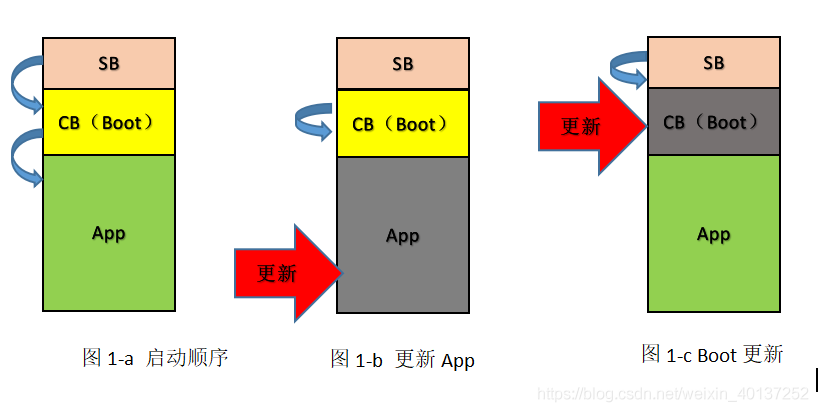
方式一,SB更新CB:
如图1-a,有的软件架构是两级Boot:SB+CB,Start Boot只检查CPU最小系统,与具体项目的外围电路无关,它独立于客户需求,由供应商自行维护,在Pilot项目早期就应开发完成。因为程序启动顺序是SB->CB->App,这样在SB里增加刷新逻辑可以更新CB。通常情况下运行CB更新App程序,特殊情况下程序启动后一直停留在SB里,更新CB。
优点:
1.逻辑结构简单清晰,软件分工明确。
2.一次刷新,操作简易。
缺点:
1.需要较大的Flash空间在SB里存放刷新逻辑,项目SOP后又要禁止这种刷新方式,造成额外的浪费。
2.软件分三级启动,结构复杂,开发和维护成本较高。对于不需要SB的控制器是一种负担。
3.万一SB也需要更新怎么办?按照这种策略,还得做个SSB?显然不现实。
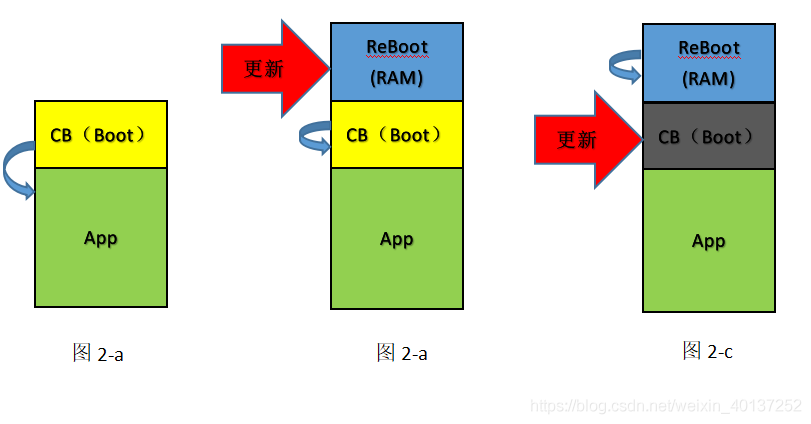
方式二、RAM+Flash Reboot更新
如图2-a,不存在SB情况下,程序启动顺序是CB->App。需要刷新Boot时,首先把Reboot程序下载到不用的RAM里(图2-b),然后在RAM环境下运行ReBoot,下载新的CB(图2-c)
优点:
1. 不需要额外的Flash空间,Boot程序运行只需要少量的RAM,因此为App设计的RAM临时可以保存Reboot程序。
2. RAM擦写速度很快,则下载ReBoot的速度会很快。
缺点:
在CB更新过程中万一CPU掉电,重新上电后Reboot内容全无,CB已经破损,程序不能正常启动,控制器瘫痪,只能开盖用JTAG烧写程序。
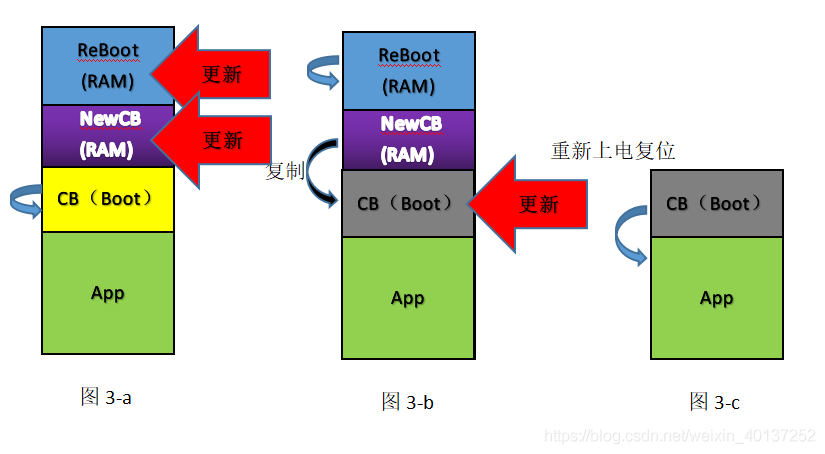
方式三、RAM+RAM ReBoot更新(对方式二的改进)
首先把ReBoot(蓝色)+NewCB(紫色)一起都下载到RAM里(图3-a),然后运行ReBoot,擦除CB Flash区域,将RAM中NewCB复制到CB Flash区域(这一步内部完成)。最后,重新上电复位,RAM中的ReBoot和NewCB自动丢失,程序从新的CB开始运行。
优点:
1.相比方式二少了一步刷新(因为ReBoot和CB是绑在一起的)。
2.相比方式二CB更新全部在CPU内部执行,不受外界干扰,耗时更短。
缺点:
1. 相比方式二需要更大的RAM空间存储ReBoot+NewCB。
2. 和方式二一样存在CB更新阶段掉电后控制器瘫痪的风险 。
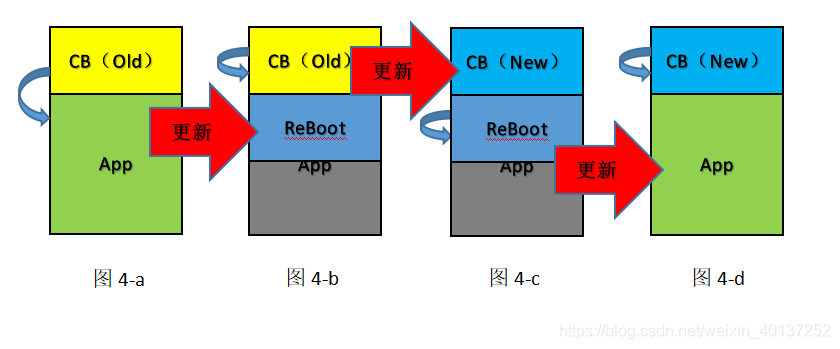
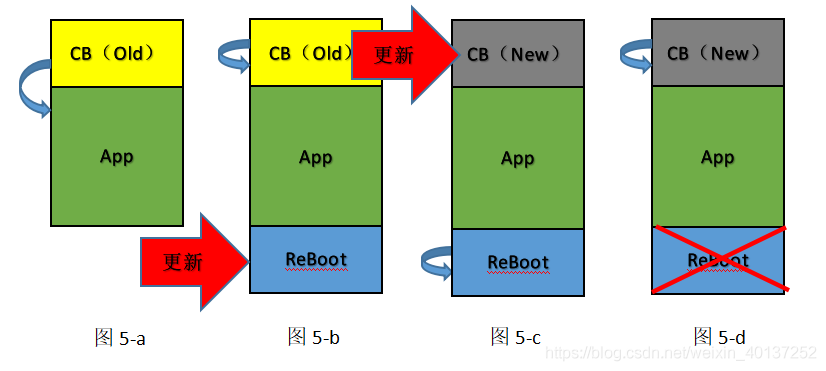
方式四、借助App程序Flash空间
刷新分三步:1.图4-b运行CB,擦除App,把ReBoot下载到App区域。2.图4-c运行ReBoot,擦除旧CB,刷入新CB。3.图4-d运行新CB,刷回App。
优点:
1.不需要额外的Flash和RAM资源。
2.稳定可靠,通过优化设计,可以保证在任何一个步骤突然掉电,上电后可以继续操作,控制器不会刷死。(详细设计方法请看附录)
3.对CB做稍微改造就可以成为Reboot程序,开发快速。
缺点:
1.步骤繁多,为了更新CB必须要先擦除App,最后恢复App,至少三次刷新。对不熟悉步骤的操作者容易搞混乱。
2.整体刷新时间会较长,两次Boot+一次App
方式五、借助额外Flash空间
相比方式四,需要一块和CB一样大小的额外Flash空间,刷新分三步:
优点:相比方式四,不需要破坏App程序,也省去了这部分更新时间。
缺点:相比方式四,需要额外的Flash空间,且必须是独立的Block。
小结:
本质上只有三种:
综上,工程师需要根据整体软件架构,CPU资源,时间人力物料等成本因素综合考虑一种适合自己产品及项目的Boot自刷新方法。
附录:
《Boot自刷新方式四(借助Flash)的具体实现方法》
背景:
对于方式四借助Flash刷新【不存在刷死风险,在任何一个步骤中控制器突然掉电,上电后可以继续操作。】的结论,是有条件的。笔者给出这个结论是从最理想的前提思考的,即只要控制器中至少有一个Boot存在(即使一个是坏的),程序就可以从任何一正常的Boot启动运行。这里就有一个问题,CPU怎么判断哪个Boot是好的,哪个是坏的?现在分析一下存在控制器刷死这种风险的情况和几种对策方案。
两级启动地址介绍:
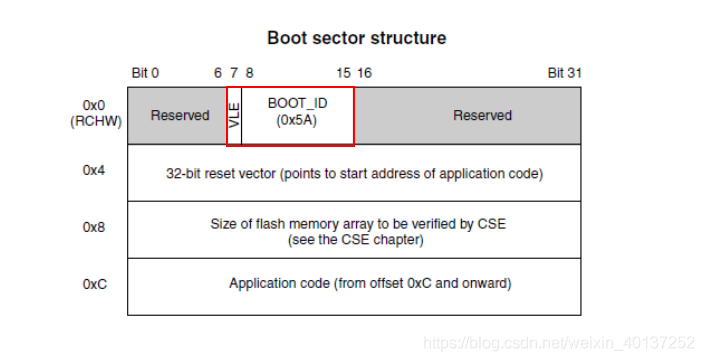
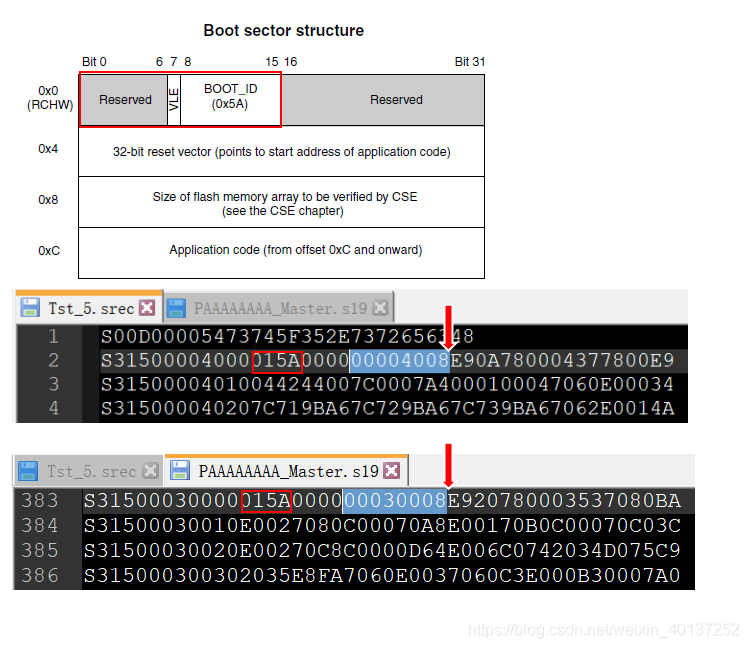
如下图示,CPU上电后程序按地址顺序,检查BootSector的有效性,如果BOOT_ID合法则从指定的地址开始执行,否则检查下一个BootSector。
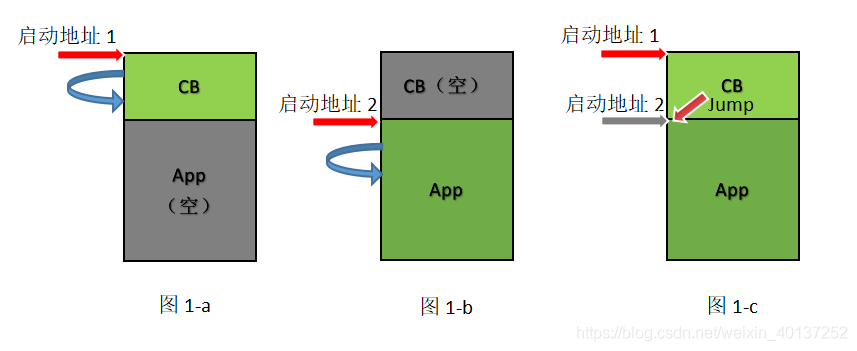
考虑CPU至少具备两个启动地址的情况,如图1-a,当且仅当启动地址1有效时(App为空),程序启动后自动进入Boot。如图1-b,当且仅当启动地址2有效时(不带Boot测试),程序启动后自动进入App。如图1-c,当启动地址1,2都有效势,程序优先从地址1启动,在Boot里检查App程序有效时,再靠跳转指令Jump到启动地址2,开始运行App。
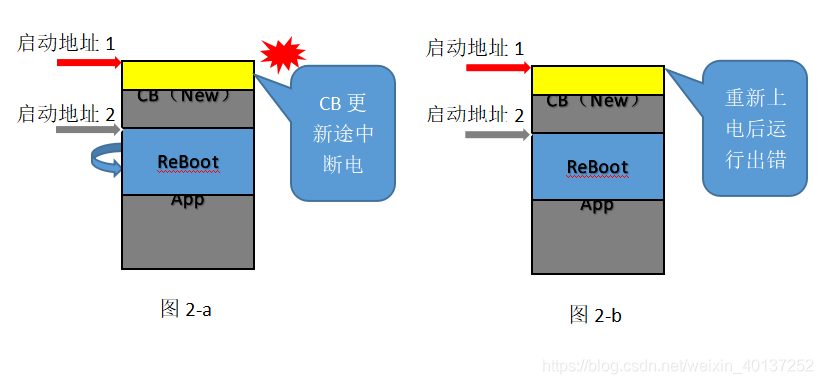
方式四控制器刷死情况分析:
如图 2-a,运行Reboot更新CB途中断电。重新上电后,如图2-b,由于启动地址1的内容是在刷新开始就被更新了是有效的,程序会进入CB运行,但是CB不完整,必然运行出错,程序不会跳入ReBoot里,从而不能再刷新(即刷死)。假设从擦除完旧CB开始到刷入新CB完成的时间有10S,在此期间掉电的可能性也不能忽略。
对策一、Boot有效性标志与启动地址重合
考虑最普遍情况,CPU只能整块(Block)的擦出(16K,32K,64K...),可以最少4字节单位写,没有顺序限制,现在CB只用了一个Block。现在调整刷新顺序:擦出成功后,先刷新橙色区域,最后一步刷新启动地址1有效性标志(灰色区域)。这样,即使在更新橙色区域过程中掉电。
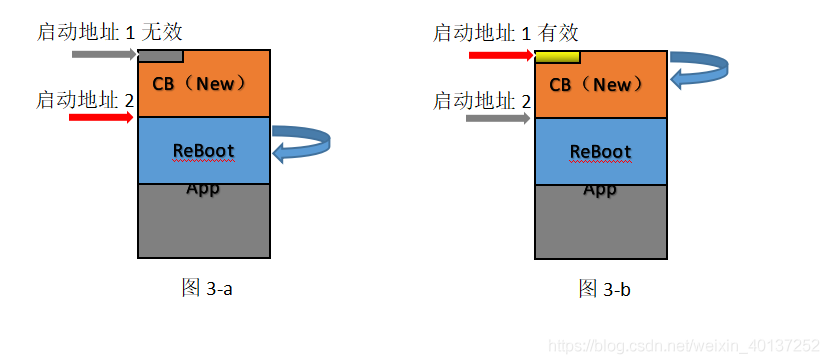
重新上电后,程序依然从启动地址2开始运行,即重新运行Reboot继续等待刷新CB指令,如图3-a所示。具体操作时也不需要更改下载流程,使用$34,36服务按顺序从上位机传输数据到CPU中,先把启动地址1的有效性标志放到RAM里,当把橙色区域都下载到Flash后,再从RAM里把启动地址1的有效性标志写到Flash里(这一步10ms以内即可完成,完全可以忽略在此时间内掉电的可能性)
如果最后一步启动地址1刷新成功,再重新上电后,程序从启动地址1开始运行新的Boot。即启动地址1起了Boot有效性标志的作用(最先擦,最后写),如图3-b所示。
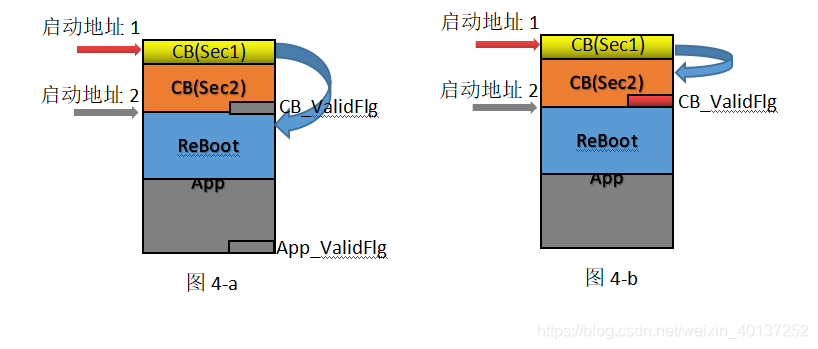
对策二、Boot有效性标志独立置尾,增加Boot有效性检查逻辑
如图4-a,把Boot分成2个段,Sec1里仅存放少量的启动自检查逻辑,当它检测到置于Sec2末尾的CB_ValidFlg无效时,即认为Boot是不完整的,则程序控制跳转到启动地址2继续运行ReBoot,重新刷新Boot。
如图4-b,当Sec1的逻辑检测到CB_ValidFlg有效时,即认为Boot刷新完成,则程序控制跳转入Sec2里,此时由于App(ReBoot)末尾的App_ValidFlg是无效的,程序并不会跳转入ReBoot里,接下来就可以刷入新的App了。
这种方法只需要对CB的逻辑和段分配做一下调整,不需要更改刷新顺序。Sec1里的启动自检查逻辑可以做的尽量小,则只要保证刷新Sec1段的过程中不掉电,控制器就不会刷死,大大降低风险。但是对量产软件,检查CB_ValidFlg无效就直接跳转入App是不合理的,所以当Boot最终定型后,应该把这个跳转逻辑关闭。
小结:
对策一简单可靠,经过实际测试验证,完全可以满足稳定刷新ECU的要求。
1.SylixOS,这款嵌入式RTOS值得学习!
2.芯片短缺或将结束?数据来说话。。。
3.代码调着调着就失联了,你碰到过吗?
4.图文并茂详解STM32时钟配置
5.电力物联网与嵌入式系统,关系几何?
6.RT-Thread携手北航出版社共办人工智能师资培训
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。