卓大大您好,我是一个动物医学的学生。我在查找资料的时候看到一个视频http://b23.tv/Wg5ssTj关于阿克曼角。
然后我发现现在用的B/C车模。C车模似乎不存在阿克曼角。因为当车轮偏转一定的角度后可以使得四个轮子所成角度近似在围绕同一个圆心做圆周运动。这样在高速运动的智能车中可以减少不必要的摩擦力和防止侧翻。是否应该考虑让厂家改进。淘汰此车模。
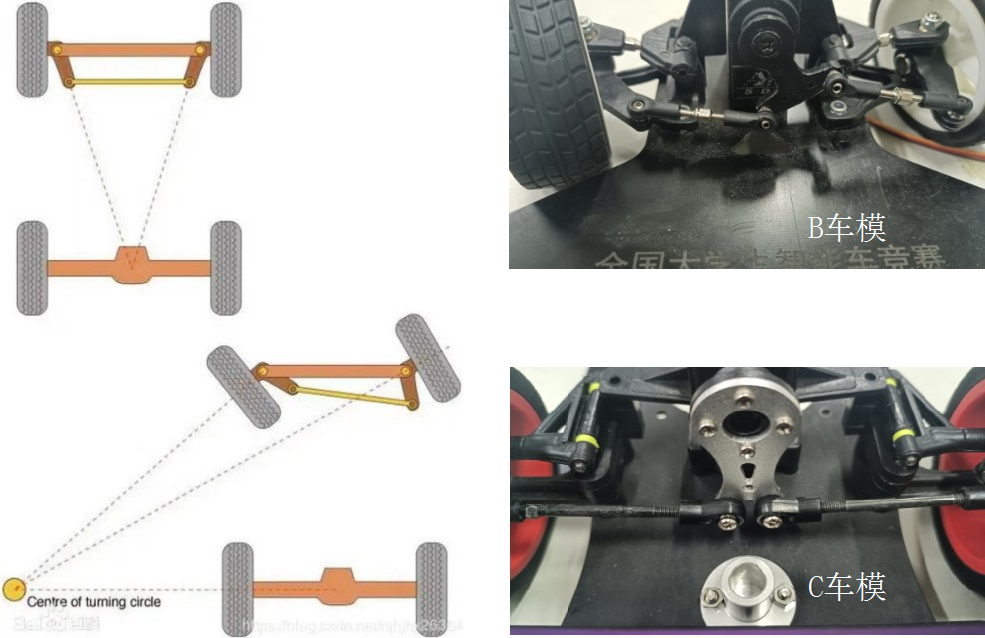
回复:在智能车竞赛中,由于是在专用赛道上比赛,车模前轮是否有充分的抓地能力,不打滑成为主要矛盾,而不是车模转弯的阻力。所以在智能车竞赛中的车模前轮转角往往不采用阿克曼转向梯形控制,而是采用欠阿克曼转角,甚至反阿克曼转角来提高车轮的抓地能力。

关于这部分的解释,可以参照短视频 汽车转弯时,为什么两个前轮偏角不一样?揭秘阿克曼转向原理[1] 中的介绍。
卓老师我来吐槽了 这车模厂家是真不行 顶丝拧的太紧了结果螺丝刀怎么都拧不下来 最后只能被磨平 真挺闹心的…为什么车模这么贵厂家还不好好做呢?卓老师我有两辆车 第一张是已经被我磨平的了 后面两张是我第二辆车。两个居然都是同一个问题…出现了滑丝。就算扳手卡死了都拧不动 然后再用力就开始摸螺纹 最后磨平。

回复: 的确这样拆卸电机齿轮就变得困难了。建议能够根据内六角螺栓。
卓大大,我是D车的平衡信标 我们暂时不会调试重心不在轮子上的pid,所以加了个3d打印件用铁块平衡,不知道可不可以? 卓老师 我的疑惑就是我加这个3d打印件算不算违反规则 , 如果违反了加铁块直接绑侧面可以吗?
回复: 按照今年规则,对于车模尺寸没有限制。所以你的这个配件应该是可以的。
汽车转弯时,为什么两个前轮偏角不一样?揭秘阿克曼转向原理: https://www.ixigua.com/7090000830195040799
