
在智能汽车里面,两个最重要的支柱是自动驾驶和数字座舱——这两个领域将来是撑起来智能汽车灵魂的最主要部分。在不同厂家里面,比如英伟达估计将来能有3000亿美金的收入,而高通相对理性也估计了80亿美金的收入。随着后续Mobileye的剥离上市,在整个过程中,还包括特斯拉、苹果等一众垂直整合,这块英伟达和后续玩家的价值评估该怎么理解,我想在这里做一些探讨。
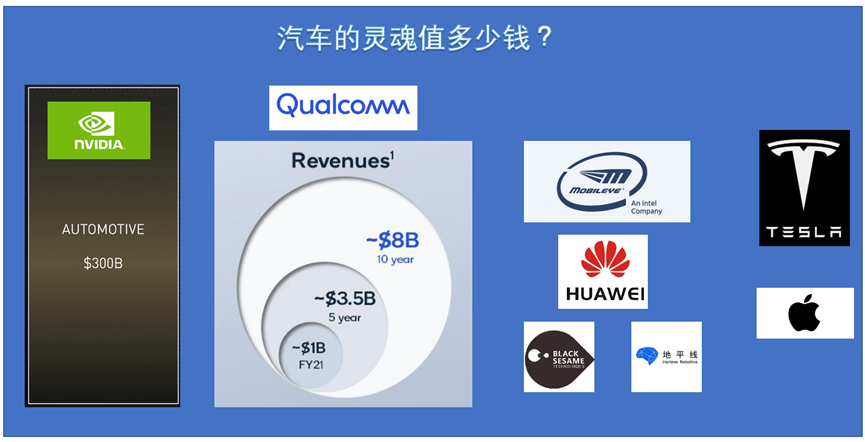
▲图1. 汽车自动驾驶领域带来的价值链什么时候兑现
Part 1
英伟达在汽车行业的霸主地位其实上面饼虽大,英伟达从2015年推出 NVIDIA Drive 系列平台,到2021年汽车业务只有5.66亿美元,占比2%。

▲图2. 英伟达的汽车业务2015 年开始推出面向座舱的 DRIVE CX 和面向驾驶的 DRIVE PX,此后先后推 出 DRIVE PX2、Drive PX Xavier、DRIVE PX Pegasus、DRIVE AGX Orin 等多个自动驾驶平台,而在 SoC 芯片方面,从 Parker、Xavier、Orin 到最新发布 的 Atlan。在这个过程中还存在很大的波折,中途特斯拉下船了。从时间线来看:● 特斯拉
第一个用,然后也是第一个下船,确认了计算平台对于一个大规模(大于100万规模)致力于高阶自动驾驶(L4)以上的车企来说,是需要做垂直整合尝试的;
● 新势力
从小鹏到蔚来和理想,这一波中国新造车企的使用,快速在追赶甚至在中国的道路环境去赶超特斯拉的自动辅助驾驶(L3之前)的体验,到2022年新车,这些都是Orin的第一批客户;
● 国内的传统车企
随着国内新势力的路线确认,这使得上汽、比亚迪和后续不少企业,都认为这条路是比较好上手的,大家都用Orin;
● 国外传统车企
奔驰2024年、捷豹路虎2025年,沃尔沃后续2025年车型,国外的车企特点就是需要做细致和周全测试,所以整个需求节点。

▲图3. 英伟达的自动驾驶业务使用公司从技术平台来看,英伟达有着快速迭代的历史:
(1) DRIVE PX
小试牛刀, CES 2015 推出Maxwell GPU 架构, 1 颗 Tegra X1 的 DRIVE CX(数字座舱), 2 颗 Tegra X1 的 DRIVE PX(自动驾驶)。
(2)DRIVE PX2
CES 2016 推出Pascal GPU 架构DRIVE PX 2,由Parker和 Pascal GPU 组成,分为单芯片AutoCruise、双芯片版的 AutoChauffeur 以及四芯片版 的 Fully Autonomous Driving,这个时候打动了和Mobileye分手的特斯拉,2016 年 HW 2.0搭载定制版DRIVE PX2 AutoCruise 版本, 2017 年HW2.5升级为2颗Parker。
(3)Drive PX Xavier
CES 2017 上推出Xavier AI Car Supercomputer, CES 2018重命名为 Drive PX Xavier, 30 TOPS 算力的 Tegra Xavier 芯片,从PX2小型化高能效而来,面积缩小的一半,功率减少1/8 左右,在小鹏 P5 与 P7 车型上大放异彩。
(4) DRIVE AGX Orin
GTC 2019上推出DRIVE AGX Orin 平台,由 2 颗 Orin SoC 芯片和 2 颗 Ampere 架构的 GPU,最高算力达到 2000 TOPS,功耗 800 W。Orin SoC实现 254 TOPS 算力,功耗低于 55W,支持多片协同方案,实现算力扩展。Orin SoC 芯片集成Arm Hercules CPU 内核、Ampere GPU 、全新深度学习加速器(DLA)和计算机视觉加速器 (PVA)。GPU 拥有 2048 个 CUDA Core 和 64 个 Tensor Core。Orin 内 部集成了 Ampere 架构 GPU,Ampere GPU 拥有 2 个 GPC(图形处理簇),包含 4 个 TPC(纹理处理簇)。在这款芯片出来以后,蔚来、理想、小鹏和国内的智己和R品牌都在用。备注:单个Orin SoC价格压得很低。

▲图4. Orin SoC的框图

▲图5. Orin的GPU、DLA、CPU和内存框图
(5)随后发布的 Atlan SoC 芯片平台
集成 DPU,单颗芯片算力超过 1000 TOPS,可以和 Orin 和 Xavier 平台的软件堆栈兼容,采用 5nm 制程,采用新型 Arm CPU 内核、新一代的 GPU、最新的 DLA 深度学习加速器、 PVA 计算机视觉加速器、并内置为先进的网络、存储和安全服务的 BlueField DPU,网络速度可达 400Gbps。Atlan SoC 2023 年向开发者提供样品,并于 2025 年大规模量产上车。

▲图6. 算力迭代的过程随着这一轮推动,以芯片为起点,在DRIVE Constellation上验证软件算法。充分验证后将部署软件,通过DRIVE Hyperion架构进行上路测试,DGX高性能训练服务器进行深度学习模型训练反复迭代。这套产品包含了芯片(Xavier/Orin/Atlan)、 DRIVE AGX 硬件平台、DRIVE OS、Driveworks、DRIVE AV 自动驾驶软件栈、 DRIVE Hyperion 数据采集和开发验证套件 、DRIVE Constellation 虚拟仿真平台和 DGX 高性能训练平台,也是涵盖了一个大生态。

▲图7. 整个英伟达的自动驾驶生态
Part 2
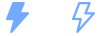
软硬件开发参考平台 DRIVE Hyperion对于当前的开发来看,Orin已经是一个量产的产品,围绕英伟达的开发主要参考Hyperion 9,目标到2026年投产。
▲图8. Atlan的芯片构造Hyperion 9的使用两个Atlan AV处理器来实现完全自动驾驶,并且英伟达计划推动Atlan SoC作为座舱芯片来推广。Hyperion 9传感器组合包括,14个更高分辨率、更高帧率的摄像头,1个成像雷达、3个激光雷达和20个超声波, 1颗雷达用于舱内乘员监测,Hyperion 9的传感器供应商还在观察和迭代中。
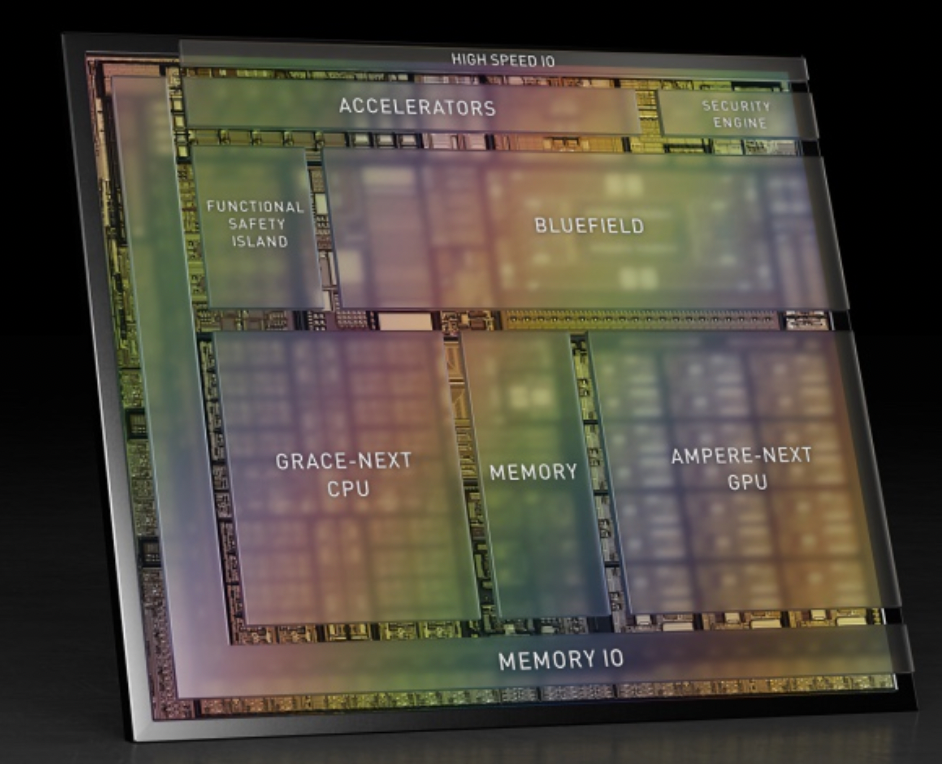
▲图9. Hypersion 8的传感器配置
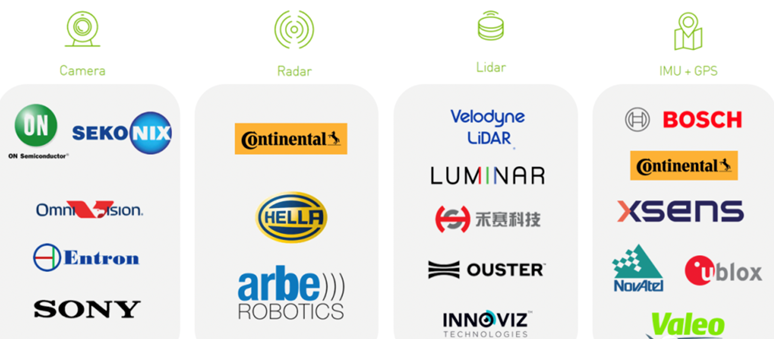
Nvidia的Hyperion 8.1架构通过锁定一些车规级雷达、摄像头、超声波和激光雷达,包括索尼、OmniVision和Onsemi的摄像头、Velodyne、Luminar和禾赛的激光雷达(Ouster和Innoviz ONE由厂家提供第三方支持)、海拉和大陆的毫米波雷达,GNSS / IMU设备以及法雷奥的摄像头与超声。
▲图10. 传感器的配置选择,清单是迭代的随着自动驾驶汽车和服务器的迭代,中间的Nvidia Drive Map成为一个重要的要素,由两个地图引擎组成:地面实况勘测地图和众包地图引擎,收集和维护collective memory of the earth。目标是到2024年在全球范围内勘测50万公里,不断更新数字仿真达到厘米级精度的地图,这个Nvidia Drive Map世界的地图数据加载并存储在Nvidia Omniverse上,可以支持全球数字仿真,使用建立在Omniverse上的自动内容生成工具持续更新和扩展。
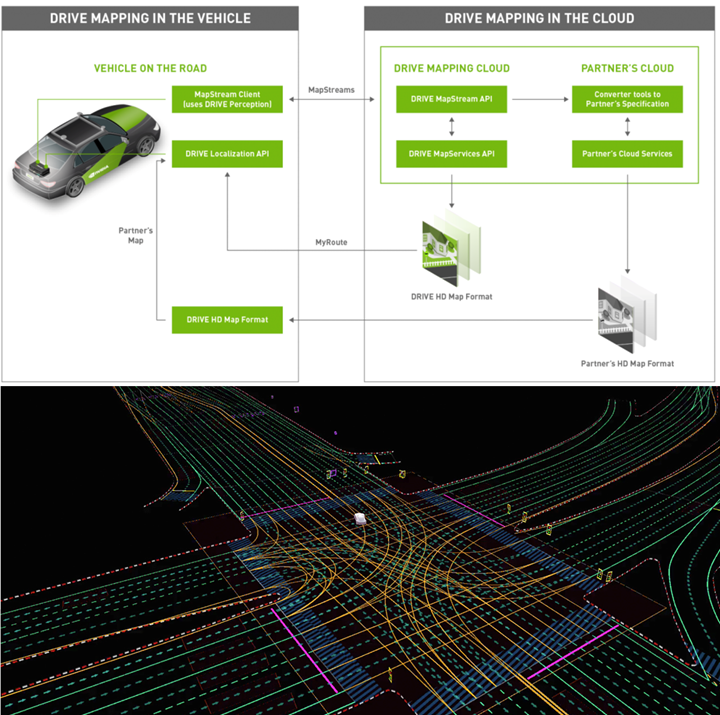
▲图11. 地图这个事,变成了和自动驾驶车辆伴生的产品备注:我相信这上面不可能包含中国。
小结:英伟达的汽车故事一直很宏大。站在这个起点来看,中国新势力车企在技术迭代方面反应很快,但到了底层技术构建这块,谁又能跟得上,这个问题值得思考。假定2025年开始缺英伟达的芯片,后面大家该怎么玩。
