创建机器人的第一步是研究物理学,以确定基于动量轮的跳跃是否可能。下图显示了计算车轮和完整立方体的惯性矩 (MOI) 的一些数学运算。

这种数学分析可以对系统进行定量理解,从而为设计选择提供信息,例如使用三个动量轮与在立方体的六个内表面中的每一个上安装一个动量轮的设计之间的平衡。
该分析的另一个结果是很好地理解了动量轮允许立方体跳跃所需的速度,以及保持立方体平衡所需的扭矩。这两个因素对于接下来的步骤都至关重要:确定所需的硬件规格。
规格和硬件设计
鉴于上面确定的所需速度和扭矩,很明显,动量轮的电机和变速箱将是制造机器人的主要挑战。使用数学模型可以系统地解决这个问题,方法是允许对更高速度(即,更多能量用于跳跃)和更高扭矩(即,平衡时更好的稳定性)之间的权衡进行定量分析。
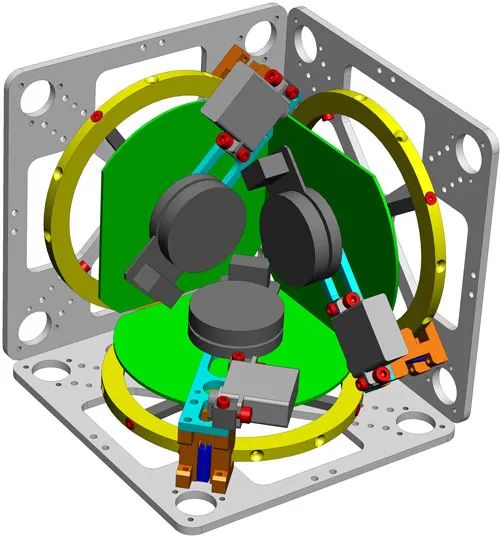
这种数学驱动的硬件设计产生了机器人核心硬件组件(动量轮、电机、齿轮和电池)的详细规格,并允许对整个系统进行 CAD 设计。
这一步的一部分是设计一个特殊的刹车来突然停止一个动量轮,将其能量转移到整个立方体并使其跳起来。
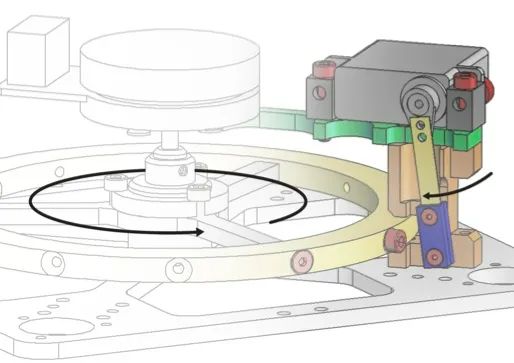
上图显示了这种制动器的早期设计,包括一个安装在动量轮上的螺钉、一个伺服电机(以黑色显示),用于将金属板(蓝色)移动到螺钉的路径(浅棕色)中,和一个安装支架(浅棕色),用于将动量轮的能量传递到立方体结构。当前的设计使用硬化金属部件和橡胶的组合来降低峰值力。
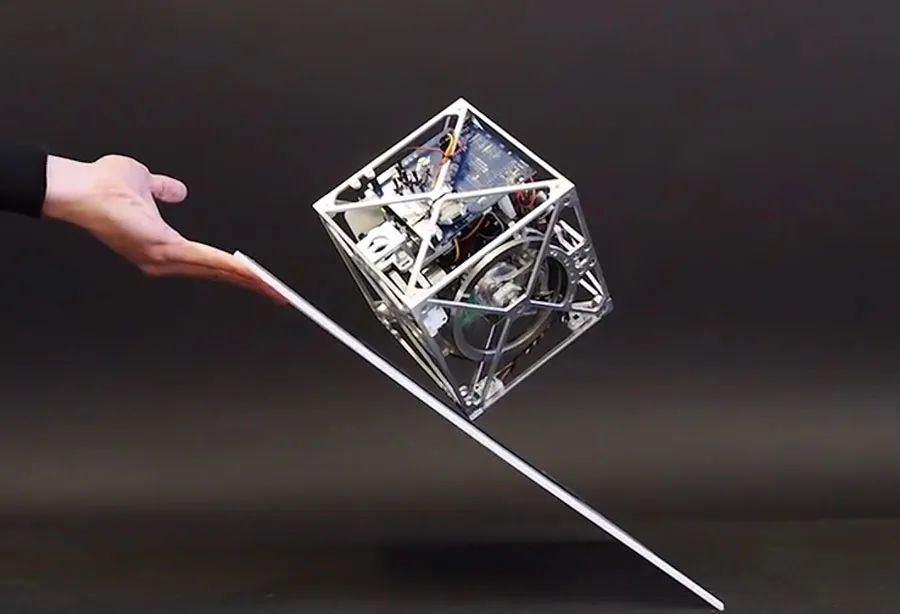
下面来看看平衡立方体cubli的效果。
