

--后台回复“资料”,领取特斯拉专利技术解析报告--
从市场趋势而言,随着中国乘用车市场发展趋于饱和以及终端消费群体年龄结构的变化,如何以新颖且差异化的用户体验,实用且高端的先进技术,打造出有市场竞争力的产品,是OEM关心的重中之重;从技术趋势而言,自动驾驶行业内都在寻求一个能满足以下需求的全新架构:包括降低电子电气复杂度,提高电子电气架构效率,提升总装生产线效率,实现更快速的开发和迭代,软硬件解耦和提升终端用户体验等等。从这个角度上讲,下一代自动驾驶系统趋向于从分布式过程向集中式过程实现统一架构。
1、软件层面:整车的算法控制单元、算力需求单元要求进一步集中,功能域控制器将进一步发展形成集中式中央车载计算中心(平台);
2、硬件层面:为了增强可扩展性、提高通信效率、减少线束长度、减少硬件实体重量,包含算法、算力、通信、功能模块、I/O、电源等硬件资源将被重新规划。
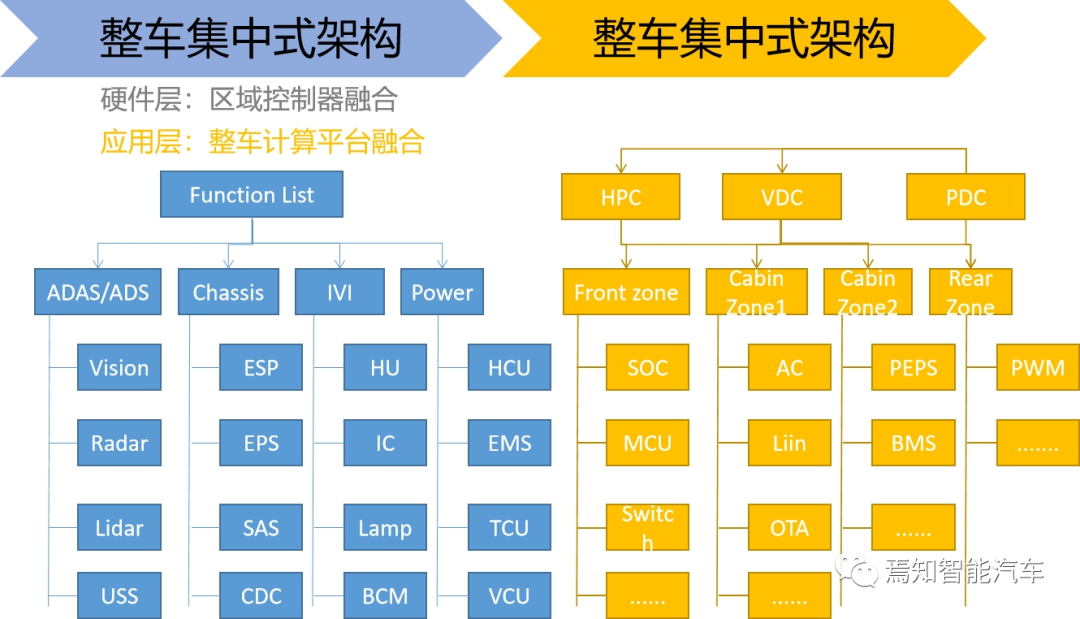
如上提到的集中式域控制器方案的实现并不是一蹴而就的,主要体现在车身单元本身具备较多的执行器单元。包含自动驾驶域本身、智能座舱方向、智能底盘方向、原车身控制单元(统称iBCM)。因此,在真正实现大域控的中央控制方案之前,自动驾驶系统会阶段性的引入诸如智能座舱域控制器,智能底盘域控制器等等。如上的划分其目的在于打破原有功能边界,可按照区域划分,形成区域控制器,完成功集能域架构渐进性的向整车集中式架构进化。
我们知道面向智能车辆的终极解决方案是实现面向服务的自动驾驶控制系统SOA。整体来说,车辆总体方案偏向于选用中央计算平台+区域控制的拓扑形式,搭载车-云一体化的整车级SOA 软件架构。而阶段性的自动驾驶控制系统需要一种区域控制单元PDC(power data centers)对周围的电子系统分配电源,收集并分发大量原始传感器数据,并对这些数据进行处理以实现自动驾驶命令等。区域控制器PDC中主要集成以下几部分功能,包含车身舒适、底盘、动力、热管理、智能驾驶、大数据、电源模式、能源消耗数据服务、功能降级及异常处理、整车标定、SOA 服务等功能。
本文将针对其中不为人熟知的区域控制器进行详述。
区域控制器PDC分布解析
如前所述,区域控制器PDC是整车物理区域的不同种传感器采集/执行器驱动的中心枢纽以及区域数据中心。可有效地承接整车的物理接口,对区域分布的电源进行分配,平衡不同的输入输出控制等,从而支持智能汽车内部的跨域融合。
对于当前整个自动驾驶车辆平台而言,整个平台预计搭载 PDC 3~4 个。一般情况下,这些区域控制器布置于车辆的四个角处,如果对自动驾驶相关传感器的密度、电力需求都很高的场合,可以考虑在B柱附近增加两个PDC。
可以参照如下布置位置方式进行:
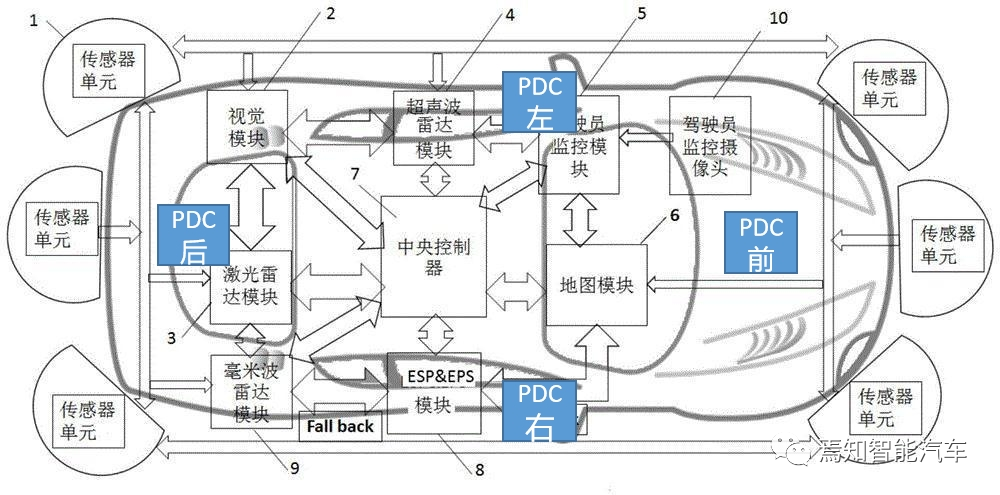
如上图表示了3个典型位置的区域控制器。分别是前舱区域控制器、座舱区域控制器、尾舱区域控制器。各区域控制器的功能如下:
1、前舱PDC
动力单元驱动控制;
前灯光系统驱动控制;
前舱传感器(如前舱周边4-6颗超声波雷达原始数据处理);
各前舱控制器传感器的IO 接口输入;
前舱控制器(动力域控、底盘域控、自动驾驶域控)电源分配;
2、座舱PDC
座舱域控制器输入(如超声波传感器目标处理数据);
座舱输出控制指令(如车门、车窗、车灯控制指令)转化;
舱内灯光、音频系统驱动控制;
座舱控制器电源分配;
3、后舱PDC
智能底盘、车身舒适系统的 IO 接入(如后舱周边4-6颗超声波雷达原始数据处理);
后舱控制器(如智能后视摄像头、侧后角雷达)电源分配;
一般的,由于前舱区域控制器与座舱区域控制器分别为自动驾驶控制器及智能座舱控制器提供相应的电源、接口、传感器信号处理能力,因此该处的区域控制器是必须配置。而后舱PDC实际上可以根据其处理的功能而作为选配方案。
区域控制器PDC功能说明
1、整车区域配电中心
PDC的功能之一是负责区域内用电器的供电与用电管理,量化用电行为,提高用电效率与安全性。在下一代自动驾驶系统的区域控制架构中,由于需要充分考虑各控制器的供电冗余,对于区域控制器而言就需要有两路电源对整车进行独立供电。同时需要作为二级电源分配节点,给对应区域内下级控制器、传感器或执行器提供电源供电管理。
对于如上提到的冗余供电模型,需要充分考虑与智能电网管理模块产品的配合设计来完成相应的供电架构,其结果是完成一套完整的可以适应不同自动驾驶等级的灵活的供电方案。如图所示:
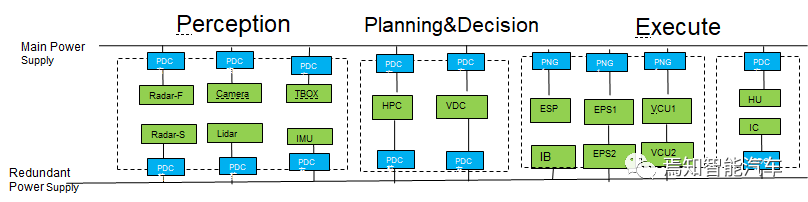
以自动驾驶分级为电源管理分割阶段可实现如下电源能力配置:
基本电源架构阶段:实现功能安全的独立供电、负载用电情况记录与分析,并实现用电故障诊断与隔离。
L2.5电源架构阶段:加入智能电网管理模块产品,针对ESP、EPS等功能安全要求高的控制器进行隔离处理,满足用电安全,确保功能安全目标的完成。
L3+电源架构阶段:可以在原供电基础上,增加智能电网管理模块进行控制器冗余供电的隔离,满足用电安全,确保更高要求的功能安全目标的实现。

对于区域控制器的供电需求,需满足同步供电类型配的电要求为非常电 ECU 供电考虑 PDC 供电或驱动的必要性,30A,45A 为一般配电的经验值,后续可根据实际情况调整,对于为常电ECU供电时需要考虑整车睡眠状态下还需要继续供电,因此需要采用自动唤醒的电源供电方式进行驱动。此外,需要考虑单路要求的电流消耗不超过额定最大值,当特殊控制器需要保留硬线唤醒时,PDC 需提供唤醒供电。
2、整车区域通信中心
区域控制器承担了区域信息中心或网关部分功能。PDC作为区域控制单元需要对其所负责的区域内节控制节点进行通信管理与信息转发,缩短信息通路,提高通信效率与安全性。
目前主流车型的总线带宽,短期内使用一般使用2-5M的CAN-FD或100M以太网就能充分满足现有通信需求。为了提升系统级功能安全,则通过预留双路CAN或以太网通信进行数据备份。考虑到下一代产品中需要面向服务进行开发的SOA需求,区域控制器通信能力则需要至少预留一路CAN或以太网,并进行大带宽通信,也能够支持服务协议与服务本身的实现,网络拓扑简图如下:
PDC 总体可实现不同类别的传感器采集以及控制器驱动。根据不同类型的传感器,提供不同的采集策略;根据不同类型的执行器,在控制器驱动过程中,提供不同的驱动策略、驱动断开策略、驱动过载保护等。
类型 | 控制类型 | 执行终端 |
传感信息采集 | 开关类 | 高/低有效开关、车门/车窗阻值式开关等 |
模拟类 | 温度传感器、雨量传感器等 | |
带唤醒功能类 | 制动开关、行车记录仪等 | |
协议类 | 高精地图协议、底层驱动协议 | |
控制器驱动 | 电机类负载 | 纹波电机类,普通电机类,三相电机类等 |
车灯类负载 | 卤素灯、LED 灯类 | |
泵类负载 | 驱动电机类 | |
电磁阀类负载 | CDC 电磁阀 |
PDC 中,对所有感知和驱动 IO 涉及终端ECU驱动能力和原始数据处理的能力,且对所有 IO 都需要进行接口匹配、信号滤波等处理。原始数据处理采用 CAN 或以太网进行传输,非实时要求的采用以太网传输(如显示交互类),实时性要求高的采用 CAN 传输(如底盘制动、转向、动力等)。
3、整车功能驱动控制
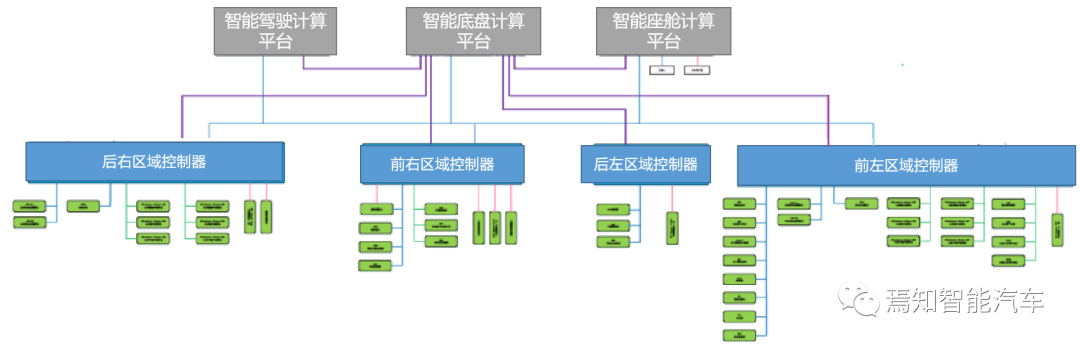
区域控制器作为整车级部分区域I/O输入输出及控制中心,将由其处理功能单一的节点,向软件计算中心集中,且在其中提供底层服务。这种集成区域内的功能模块,标准化硬件I/O的采集与驱动,可以提高扩展性与通用性。
为计算中心实现新的复杂功能或特性提供软硬件基础,把分配在区域控制器PDC中的软件模块进行原子或基础服务的封装,一般在计算中心中通过SOME/IP协议调用相关资源,为计算中心实现新的复杂功能或特性提供软硬件基础。在新的应用软件中将进行功能的重新划分,划分原则参照功能策略、分层功能时延、区域同步性、代码复用率、功能可能的迭代速率、功能安全这几个维度进行。

对于如上图所示针对整个车辆功能分配原则包含如下的设计性能需求:
① 设计相关功能系统框图,判断其中硬件需求;
② 制定功能策略,列出信号交互需求;
③ 分析不同UseCase,判断是否设计跨域交互;
④ 策略(感知、仲裁、控制、执行)分层建模;
⑤ 根据不同层级分配不同的策略到相应的控制器中;
⑥ 对于时延要求高的场景,分析分配结果是否满足性能要求;
⑦ 对于功能安全较高的场景,分析分配结果是否满足功能安全要求;
基于SOA服务的智能汽车功能
下一代智能驾驶汽车需要进行面向服务的SOA设计,这一过程需要控制单元参照其所承担的服务功能(车身舒适、AC、底盘、HCU 等)层面进行接口统一、服务转化和封装管理。用于其计算平台功能调用,如功能激活、解闭锁服务、车窗控制服务等。

如下将围绕智能汽车驾驶域进行相关功能控制说明。当前,PDC 中 ADAS 功能主要集中在简单的传感信息处理上,也即对其中的12个超声波雷达信号处理。包含提供如基础服务或增强服务等。12个超声波雷达USS 对应自动泊车、代客泊车配置。同时,对于如上的12个超声波雷达,需要根据其安装位置分别布置于车身不同的机舱内。如果是前后各一个PDC的模式,则是分别分配前后六个USS到两个不同的PDC中,如果是4个PDC模式,则是区分前左、前右、后左、后右分别各挂3个USS的方式进行信息处理。
PDC 处理超声波雷达信息包含如下:
1、原始目标位置、速度、加速度等探测信息;
2、目标及报警信息;
3、车位实际可用信息;
如上探测的目标、报警、车位信息需要发送到泊车控制器、行车控制器、座舱域控制器等用于控制自动泊车、低速行车、倒车 AEB 、报警提示等。
对于智能汽车来讲,其重点关注车身舒适及底盘的相关控制逻辑。以上两者中,前者对于实时性要求不高,因此,适用于譬如像智能启动、内部灯光、电动车窗、电脑车门、胎压监测、电动转向柱调节等。以上后者中,由于其功能安全要求较高,则需要适配更高的实时性和准确性。当然,一般情况下,制动相关的控制会单独放到另外一个功能安全和控制性能更高的控制器(如车身控制单元VDC)中,但是部分制动功能也会不可避免的放到区域控制器中,如智能悬架控制中的空气悬架就会将传感器你和执行器介入PDC中,并根据PDC反馈的传感器状态爱和整车状态,发送高度调节指令给PDC调整空气悬架高度,且通常境况搞下,空气悬架高度检测功能集成到PDC中,定期唤醒监测车身高度。此外,通常前PDC保留EPB控制,集成EPB控制模块。
同时为了满足更高级别的功能安全需求,PDC 可单独搭载 功能安全较高的MCU,向上支持功能安全到 ASILD级别。算力可支撑基本的传感器原始信号处理需求和控制器逻辑运算需求,一般会预留 50%以上算力。
下一代自动驾驶系统为了实现SOA架构服务能力,通常采用了AUTOSAR 软件架构、服务中间件来支持具有高安全高确定性的软件部署。中央计算平台上要求底层软件、底层硬件、应用层软件、应用层硬件解耦。作为实现这一智能服务平台的区域控制单元,PDC需要进行有效的设备管理及配置管理,尽可能多的帮助中央域控制单元实现阶段性解耦和接口封装。实现设备即插即用,软硬件随时适配。通过执行更简单的控制功能,例如灯光、音频系统,从而进一步减少控制单元的数量。

