

作者简介
baron (网名:代码改变世界ctw),九年手机安全/SOC底层安全开发经验。擅长trustzone/tee安全产品的设计和开发
cache是多级的,在一个系统中你可能会看到L1、L2、L3, 当然越靠近core就越小,也是越昂贵。一般来说,对于 big.LITTLE架构中,在L1是core中,L1又分为L1 data cache和 L1 Instruction cache, L2 cache在cluster中,L3则在BUS总线上。
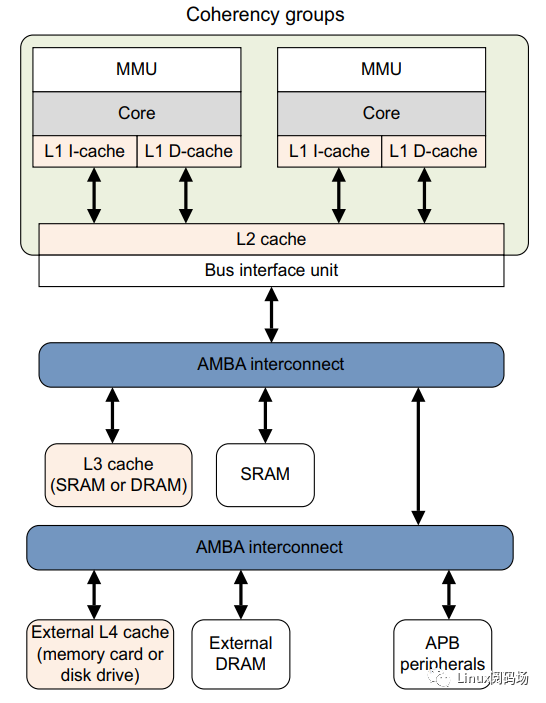
很多时候cache都是和MMU一起使用的(即同时开启或同时关闭),因为MMU页表的entry的属性中控制着内存权限和cache缓存策略等
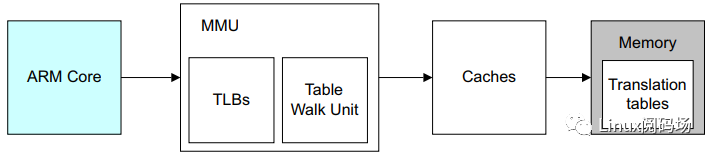
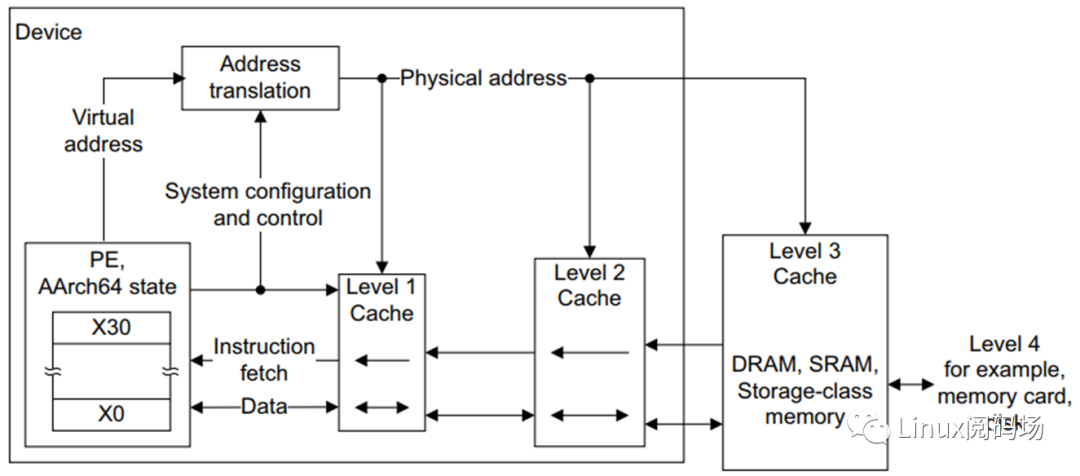
在ARM架构中,L1 cache都是VIPT的,也就是当有一个虚拟地址送进来,MMU在开始进行地址翻译的时候,Virtual Index就可以去L1 cache中查询了,MMU查询和L1 cache的index查询是同时进行的。如果L1 Miss了,则再去查询L2,L2还找不到则再去查询L3。注意在arm架构中,仅仅L1 cache是VIPT,L1L2和L3都是PIPT。
big.LITTLE架构 和 DynamIQ架构 的cache是有区别的

在 big.LITTLE 架构中,大核小核在不同的cluster中,做为两个不同的ACE或CHI Master,连接到缓存一致性总线上(CCI或CMN)。大核cluster和小核cluster的缓存一致性,也需要通过一致性总线来解决。
到了 DynamIQ 架构中,大核和小核都是一个DSU cluster中,一个DSU cluster最多可以支持8个core。如果你的系统是8个core,那么一个DSU就够了,那么系统中也就只有一个ACE或CHI Master,大核和小核之间的一致性,都在DSU cluster内完成了。
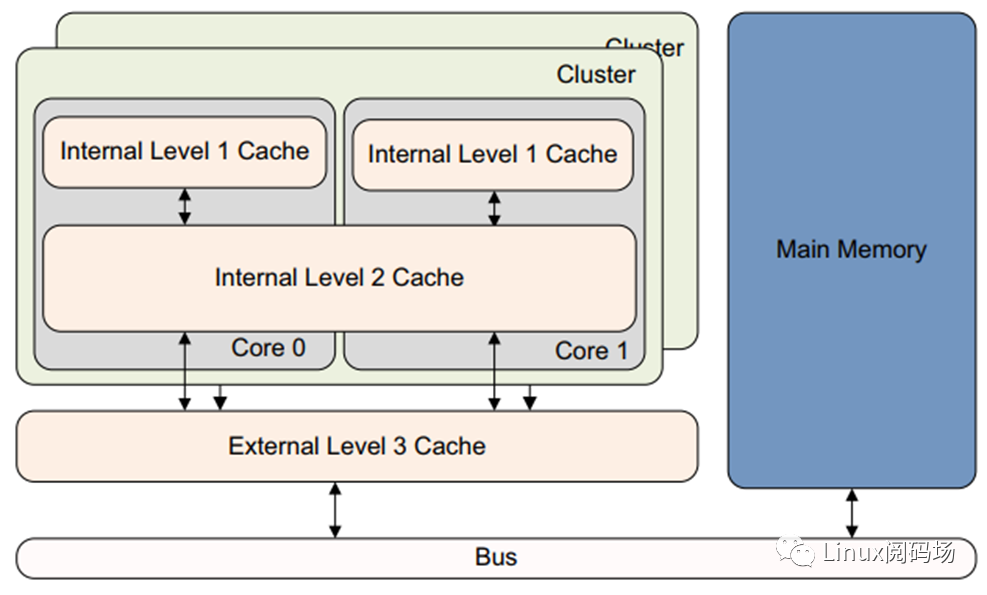
big.LITTLE架构的cache在 big.LITTLE的架构中,L1是在core中的,是core私有的;L2是在cluster中的,对cluster中的core是共享的;L3则对所有cluster共享。big.LITTLE的架构的一个cache层级关系图如下所示:
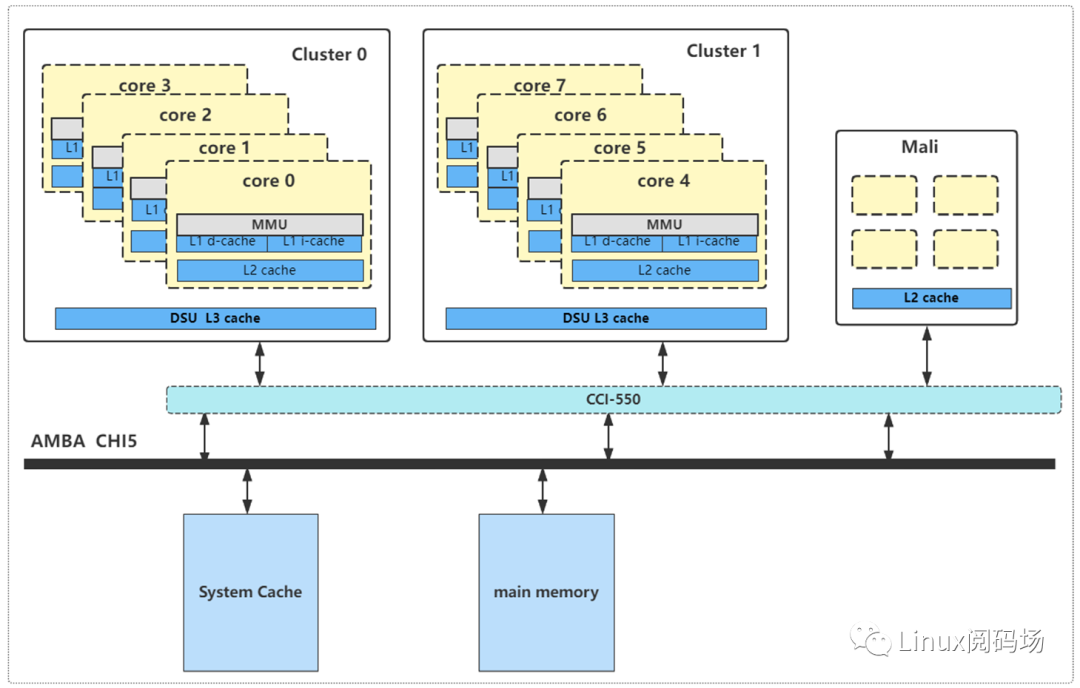
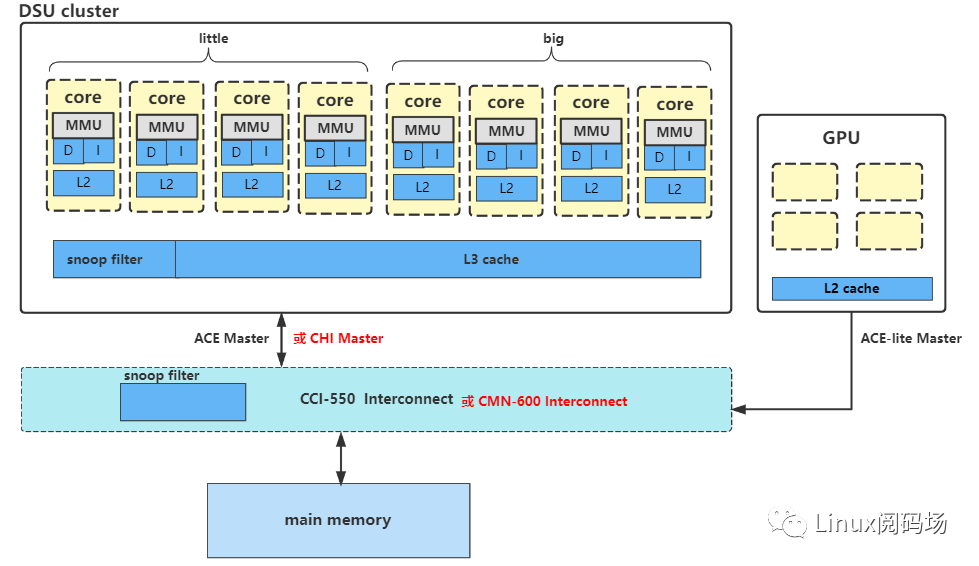
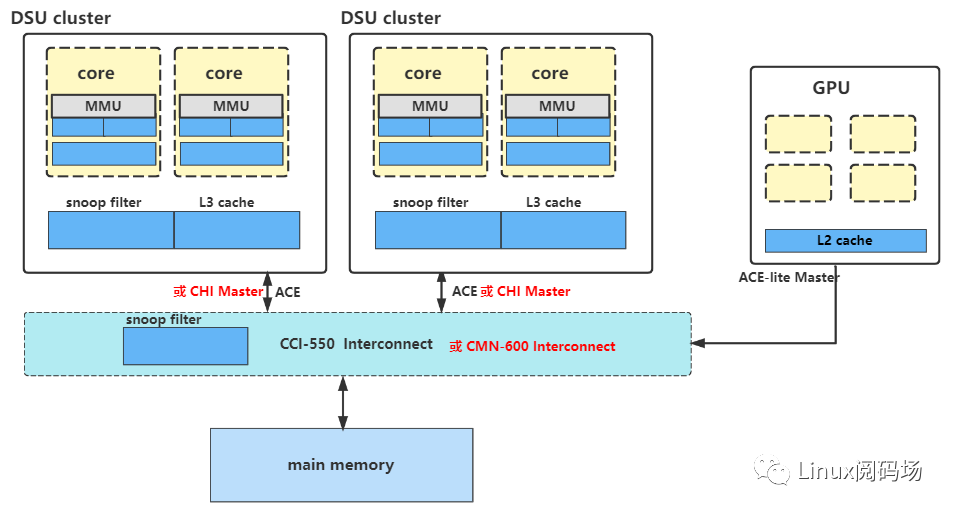
DynamIQ架构架构的cache在 dynamIQ的架构中,L1和L2都在core中的,都是core私有的;L3则是在cluster中的,对cluster中的core是共享的;如有L3或system cache,则是所有cluster共享。dynamIQ的架构的一个cache层级关系图如下所示。注意,一般来说一个DSU Cluster就可以做到支持8个core,以下只是举一个极端的例子,在硬件设计时,我非要放置两个DSU cluster 可不可以?两个DSU Cluster做为两个ACE Master连接到了CCI一致性总线上。
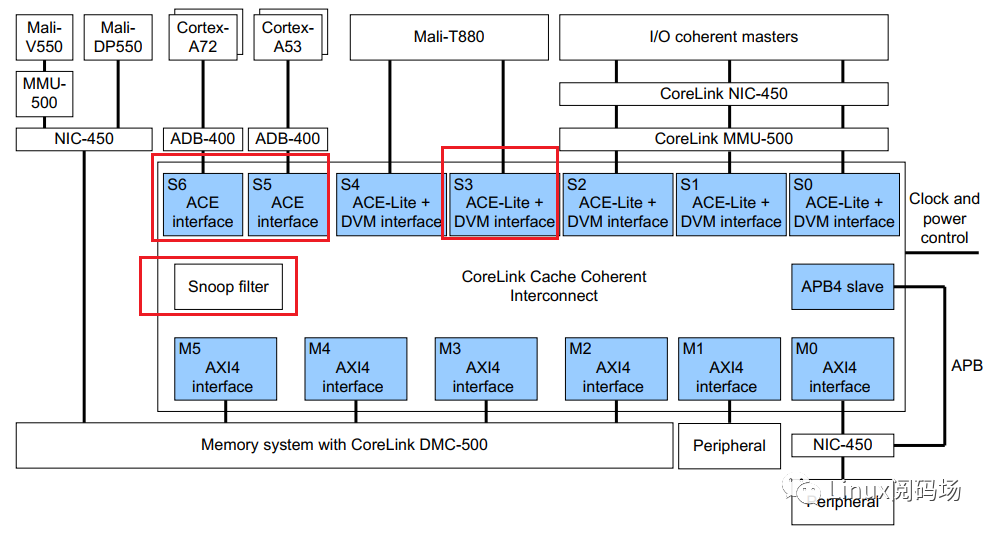
用于ACE Master缓存一致性总线有 CCI-550、 CCI-500、 CCI-400。

它的主要作用是可以互联多个 ACEMaster、 ACE-liteMaster,然后通过ACE接口协议,做到多个Master之间的缓存一致性。CCI最多支持2个 ACEMaster,共计支持8个 ACEMaster+ ACE-liteMaster。所以呢,如果是 big.LITTLE架构的,那么最多支持两个cluster互联,每个cluster 8个core,所以最多支持8个core;如果是 dynamIQ架构的,那么最多支持两个DSU cluster互联,每个cluster 8个core,所以最多支持16个core
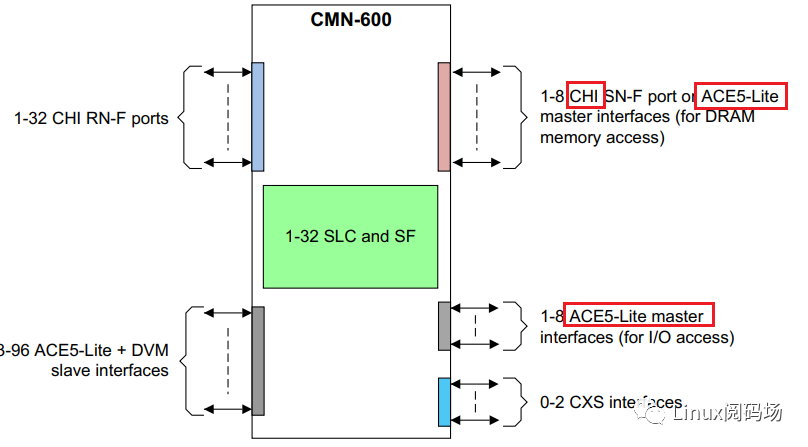
用于CHI Master缓存一致性总线有 CMN-700、 CMN-600.

它的主要作用是可以互联多个 CHIMaster、 ACE-liteMaster,然后通过CHI接口协议,做到多个Master之间的缓存一致性。CCI-600最多支持8个 CHIMaster,共计支持8个 CHIMaster+ ACE-liteMaster。
big.LITTLE架构中的cluster interface在 big.LITTLE架构中,cluster连接到一致性总线的接口,可以是ACE,也可以是CHI,所以big.LITTLE cluster既可以做为ACE Master连接到总线,也可以做为CHI Master连接到总线。

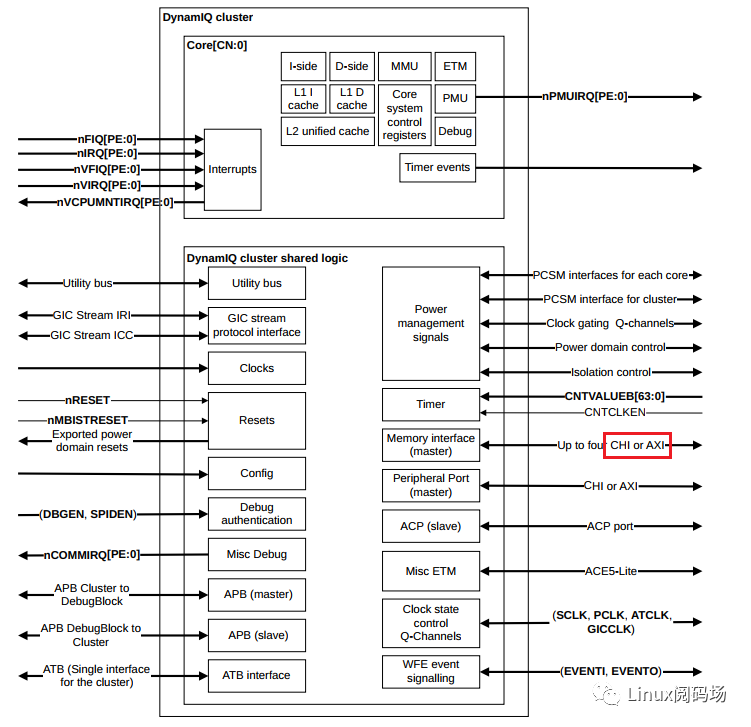
dynamIQ架构中的DSU interface2017年引入dynamIQ架构, 在DSU(dynamIQ Share Unit)规范中,连接到一致性总线的接口,可以是ACE,也可以是CHI,所以DSU cluster既可以做为ACE Master连接到总线,也可以做为CHI Master连接到总线。

而在DSU-110中, 连接到一致性总线的接口可以是CHI ,但不再有ACE了。如果你使用的是DSU-110,DSU Cluster做为CHI Master了,那么你一定是采用CMN的总线互联方式。
所以呢,你看到的系统架构图(也是近几年最常用的),可能是下面这个样子的,所有的core都在一个DSU cluster中,所有core共享L3 cache,DSU接到CCI或CMN缓存互联一致性总线上,可以和其它ACE-Lite Master(如 GPU)共享缓存数据
当然了,举个稍微极端的例子,如下连接架构图也不是不可能,系统中有两个DSU cluster,DSU接到CCI或CMN缓存互联一致性总线上。
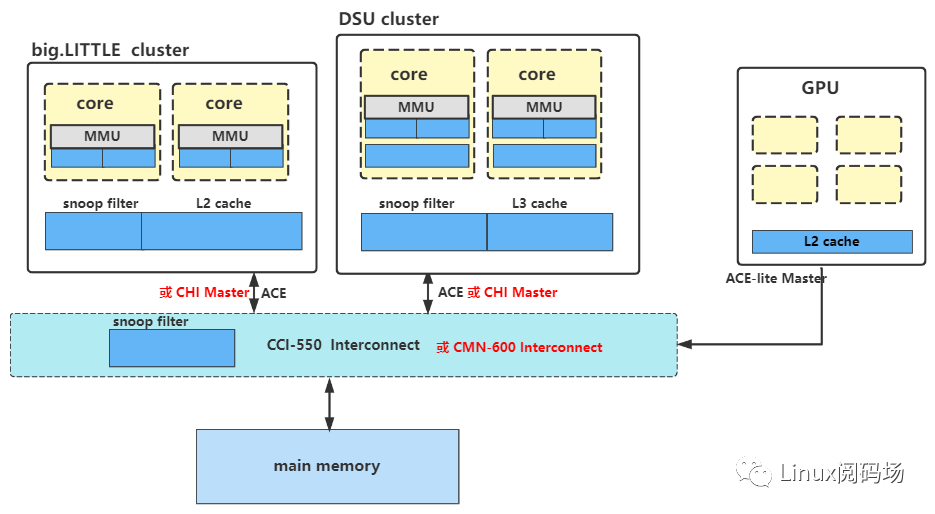
事实上big.LITTLE架构的cluster,也是可以做为CHI Master。下面这种超极端的例子,技术理论上也是可行的(当然可能不会有人用)。
可以参考ARM文档,
对于 big.LITTLE架构的core,其cache大小基本是固定的。
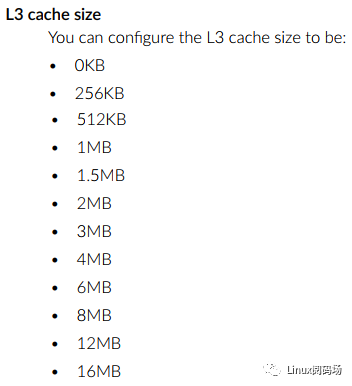
对于 dynamIQ架构的core,其L1和L2 cache大小基本是固定的。但对于L2 cache 则是可选择可配置的
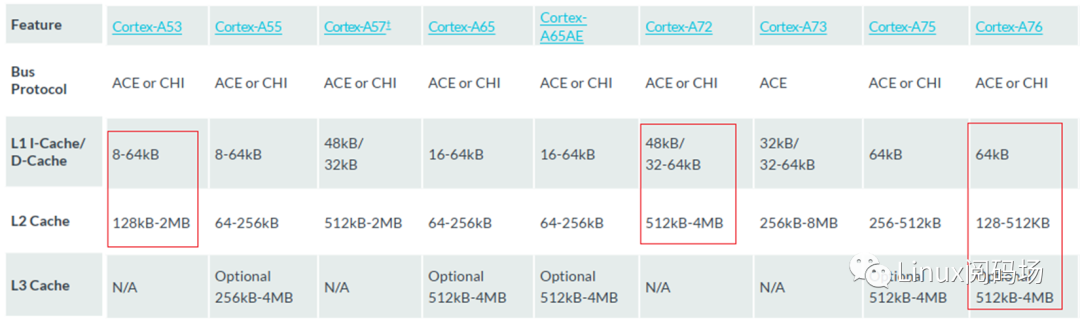
另外查阅DSU TRM文档,可以看到L3 Cache可以配置 0 - 16MB的大小。
cache的组织形式有:
全相连
直接相连
多路组相连(如4路组相连)

在一个core中一个架构中一个SOC中,所有cache的组织形式并不是都一样的。即使L1 D-cache和L1 I-cache的组织形式,也都可能不是一样的的。具体的组织形式是怎样的,需要查询你的core trm手册。
例如我们查询到Cortex-A53的cache信息如下:
L1 I-Cache
可配:8KB, 16KB, 32KB, or 64KB
cacheline:64bytes
2路组相连
128-bit的读L2 memory的接口
L1 D-Cache
可配:8KB, 16KB, 32KB, or 64KB
cacheline:64bytes
4路组相连
256-bit的写L2 memory的接口
128-bit的读L2 memory的接口
64-bit的读L1到datapath
128-bit的写datapath到L1
L2 cache
可配置的: 128KB, 256KB, 512KB, 1MB and 2MB.
cacheline:64bytes
Physically indexed and tagged cache(PIPT)
16路组相连的结构
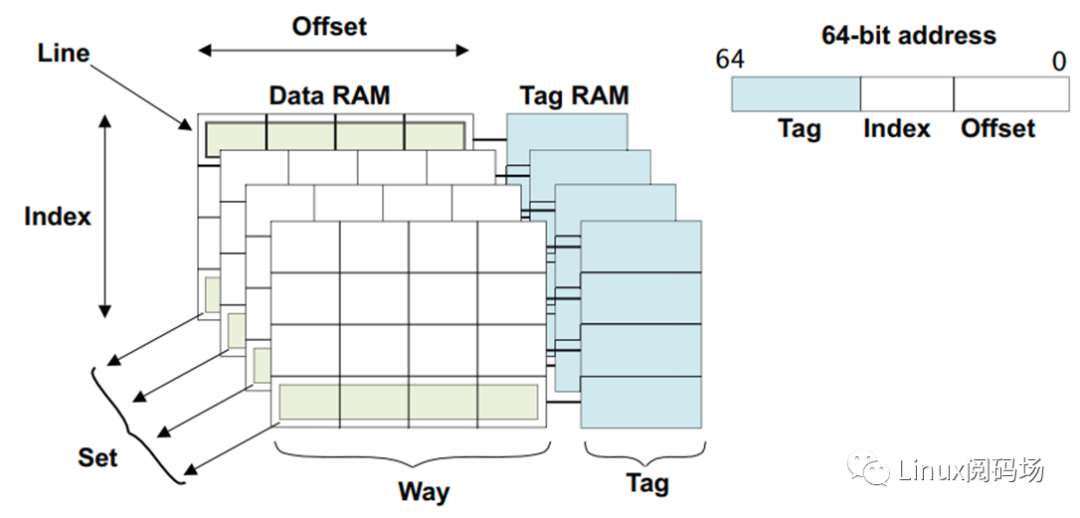
因为有了多路组相连这个cache,所以也就有了一些术语概念:
index :用白话理解,其实就是在一块cache中,一行一行的编号(事实是没有编号/地址的)
Set :用index查询到的cache line可能是多个,这些index值一样的cacheline称之为一个set
way:用白话来说,将cache分成了多个块(多路),每一块是一个way
cache TAG :查询到了一行cache后,cachelne由 TAG + DATA组成
cache Data :查询到了一行cache后,cachelne由 TAG + DATA组成
cache Line 和 entry 是一个概念
cache一般是有如下种类;
PIPT
VIVT
VIPT
在一个core中一个架构中一个SOC中,你所使用的cache是哪种类型的,都是固定的,是软件改不了的。 在ARM架构中,一般L1 cache都是VIPT的,其余的都是PIPT的。VIPT和PIPT的原理,基本也都是一样的,只是硬件查询时稍微有一丁点的区别,在后续讲cache查询时会再次介绍。
那么,你还学什么VIVT?你为什么还要去理解VIVT的原理?你为什么还要去分析cache同名、重名的问题?这样的问题,在armv7/armv8/armv9架构中都是不存在的
读分配(read allocation) 当CPU读数据时,发生cache缺失,这种情况下都会分配一个cache line缓存从主存读取的数据。默认情况下,cache都支持读分配。
写分配(write allocation) 当CPU写数据发生cache缺失时,才会考虑写分配策略。当我们不支持写分配的情况下,写指令只会更新主存数据,然后就结束了。当支持写分配的时候,我们首先从主存中加载数据到cache line中(相当于先做个读分配动作),然后会更新cache line中的数据。
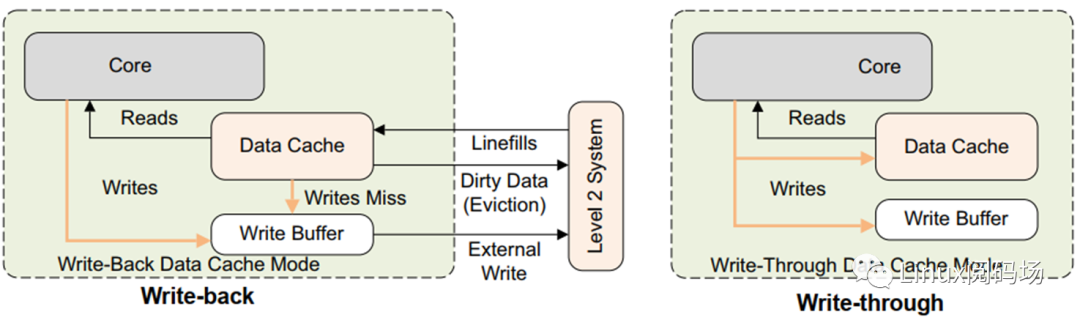
写直通(write through) 当CPU执行store指令并在cache命中时,我们更新cache中的数据并且更新主存中的数据。cache和主存的数据始终保持一致。
写回(write back) 当CPU执行store指令并在cache命中时,我们只更新cache中的数据。并且每个cache line中会有一个bit位记录数据是否被修改过,称之为dirty bit(翻翻前面的图片,cache line旁边有一个D就是dirty bit)。我们会将dirty bit置位。主存中的数据只会在cache line被替换或者显示的clean操作时更新。因此,主存中的数据可能是未修改的数据,而修改的数据躺在cache中。cache和主存的数据可能不一致
对于cacheable属性,inner和outer描述的是cache的定义或分类。比如把L1/L2看做是inner cache,把L3看做是outer cache。
通常,内部集成的cache属于inner cache,外部总线AMBA上的cache属于outer cache。例如:
对于big.LITTLE架构(A53为例)中,L1/L2属于inner cache,如果SOC上挂了L3的话,则其属于outer cache
对于DynamIQ架构(A76为例)中,L1/L2/L3属于inner cache,如果SOC上挂了System cache(或其它名称)的话,则其属于outer cache
然后我们可以对每类cache进行单独是属性配置,例如:
配置 inner Non-cacheable 、配置 inner Write-Through Cacheable 、配置 inner Write-back Cacheable
配置 outer Non-cacheable 、配置 outer Write-Through Cacheable 、配置 outer Write-back Cacheable

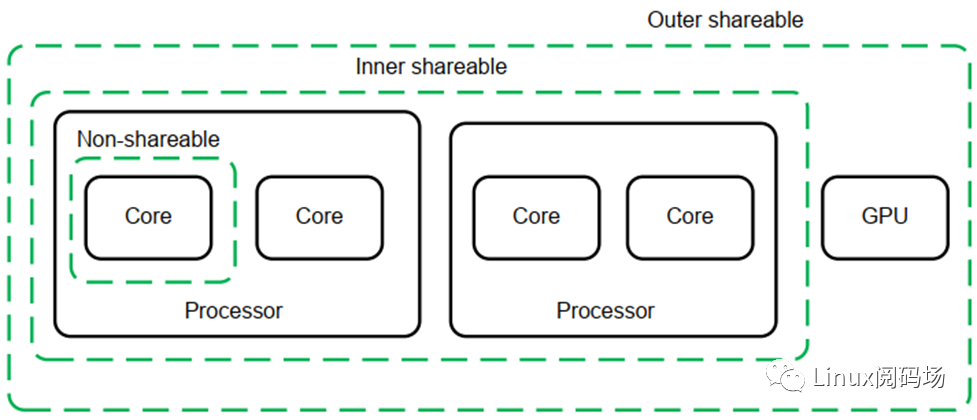
对于shareable属性,inner和outer描述的是cache的范围。比如inner是指L1/L2范围内的cache,outer是指L1/L2/L3范围内的cache
在arm架构中,将物理内存分成了device和normal两种类型
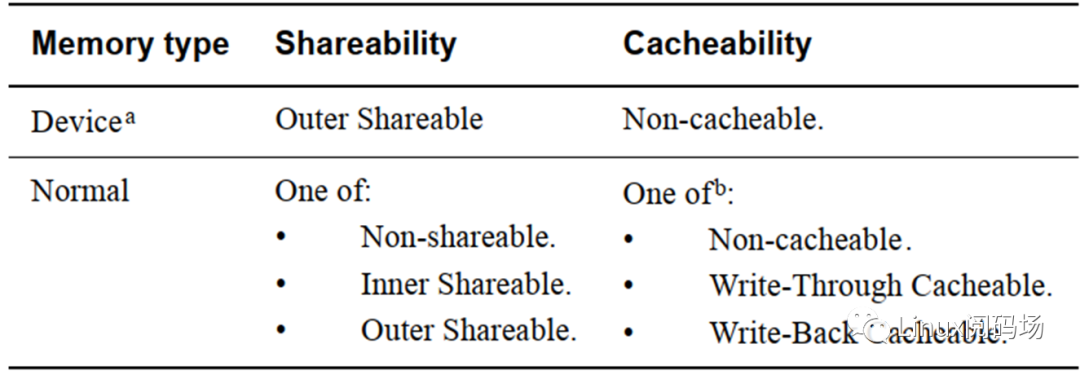
而是每种的内存下(device和normal)又分出了多种属性。ARM提供一个 MAIR寄存器, 将一个64位的寄存器分成8个attr属性域,每个attr属性域有8个比特,可配置成不同的内存属性。也就是说,在一个arm core,最多支持8中物理内存类型。
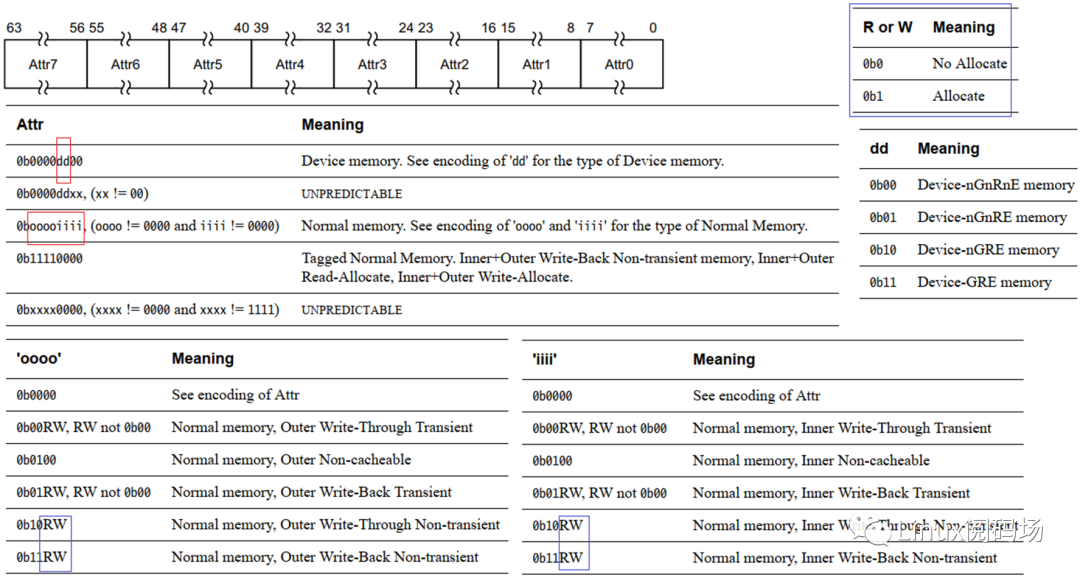
而我们在MMU使用的页表的entry中的属性位中,BIT[4:2]占3个比特,表示index,其实就是指向MAIR寄存器中的attr。(Attribute fields in stage 1 VMSAv8-64 Block and Page descriptors)
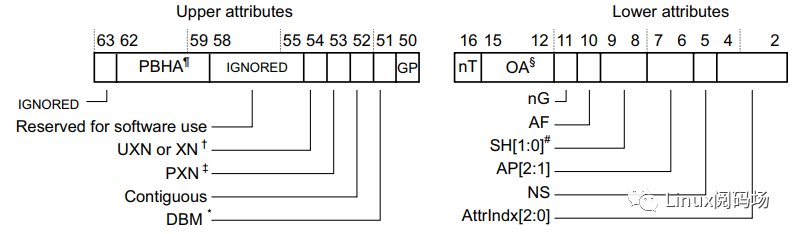
PBHA, bits[62:59] :for FEAT_HPDS2
XN or UXN, bit[54] :Execute-never or Unprivileged execute-never
PXN, bit[53] :Privileged execute-never
Contiguous, bit[52] :translation table entry 是连续的,可以存在一个TLB Entry中
DBM, bit[51] :Dirty Bit Modifier
GP, bit[50] :for FEAT_BTI
nT, bit[16] :for FEAT_BBM
nG, bit[11] :缓存在TLB中的翻译是否使用ASID标识
AF, bit[10] :Access flag, AF=0后,第一次访问该页面时,会将该标志置为1. 即暗示第一次访问
SH, bits[9:8] :shareable属性
AP[2:1], bits[7:6] :Data Access Permissions bits,
NS, bit[5] :Non-secure bit
AttrIndx[2:0], bits[4:2]
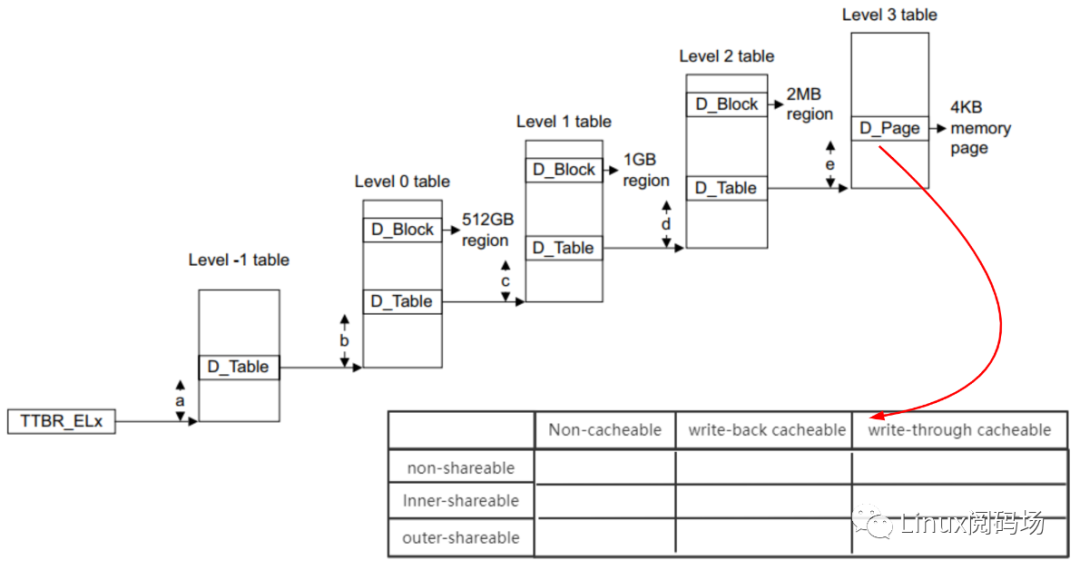
也就是说,页表的每一个entry中,都指向MAIR寄存器中的一个属性域。也就是页表的每一个entry都配置了一种内存类型。如下所示,便很好的展示了,MMU页表的每一个page descriptor(也叫entry)都指向一个内存属性类型。
高速缓存控制器(cache controller )是负责管理高速缓存内存的硬件块,其方式对程序来说在很大程度上是不可见的。它自动将代码或数据从主存写入缓存。它从core接收读取和写入内存请求,并对高速缓存或外部存储器执行必要的操作。
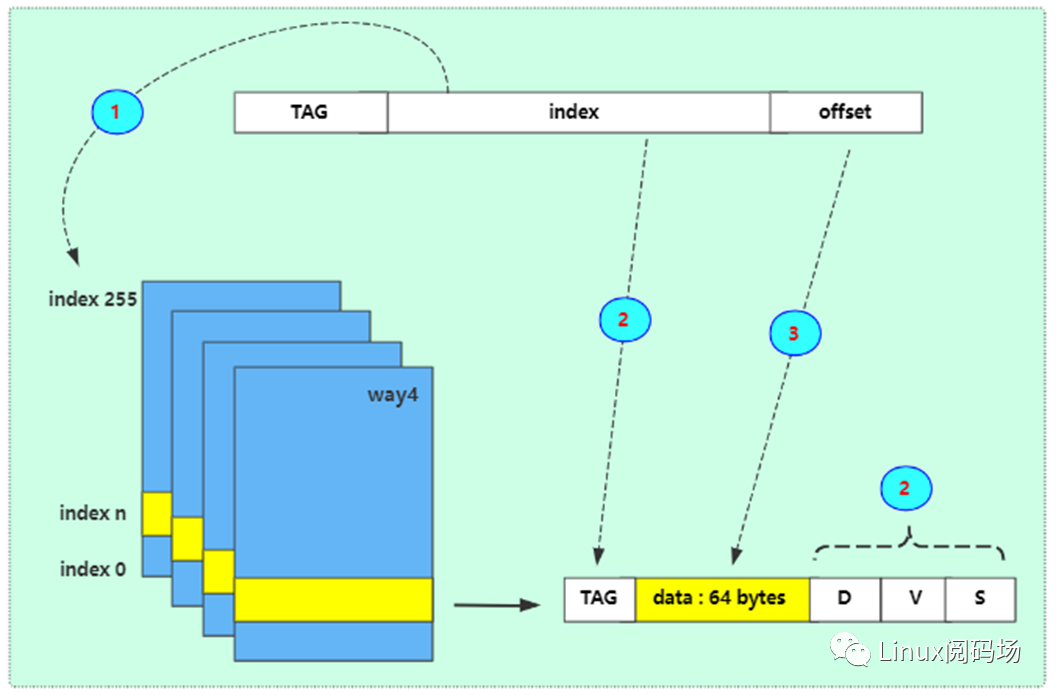
当它收到来自core的请求时,它必须检查是否能在缓存中找到所请求的地址。这称为缓存查找(cache look-up)。它通过将请求的地址位的subset(index)与与缓存中的physical TAG 进行比较来做到这一点。如果存在匹配,称为命中(hit),并且该行被标记为有效,则使用高速缓存进行读取或写入。
当core从特定地址请求指令或数据,但与缓存标签不匹配或标签无效时,会导致缓存未命中,请求必须传递到内存层次结构的下一层,即 L2缓存或外部存储器。它还可能导致缓存行填充。缓存行填充会导致将一块主内存的内容复制到缓存中。同时,请求的数据或指令被流式传输到core。这个过程软件开发人员不能直接看到。在使用数据之前,core不需要等待 linefill 完成。高速缓存控制器通常首先访问高速缓存行内的关键字。例如,如果您执行的加载指令在缓存中未命中并触发缓存行填充,则内核首先检索缓存行中包含所请求数据的那部分。这些关键数据被提供给core流水线,而缓存硬件和外部总线接口随后在后台读取缓存线的其余部分。
总结一下就是:先使用index去查询cache,然后再比较TAG,比较TAG之后再检查valid标志位。但是这里要注意:TAG包含了不仅仅是物理地址,还有很多其它的东西,如NS比特位等,这些都是在比较TAG的时候完成。
假设一个4路相连的cache(如cortex-A710),大小64KB, cache line = 64bytes,那么 1 way = 16KB,indexs = 16KB / 64bytes = 256 (注: 0x4000 = 16KB、0x40 = 64 bytes)
0x*4000 -- index 0 0x4040 -- index 1 0x4080 -- index 2 ...... 0x*7fc0 -- index 255
0x*8000 -- index 0 0x8040 -- index 1 0x8080 -- index 2 ...... 0x*bfc0 -- index 255
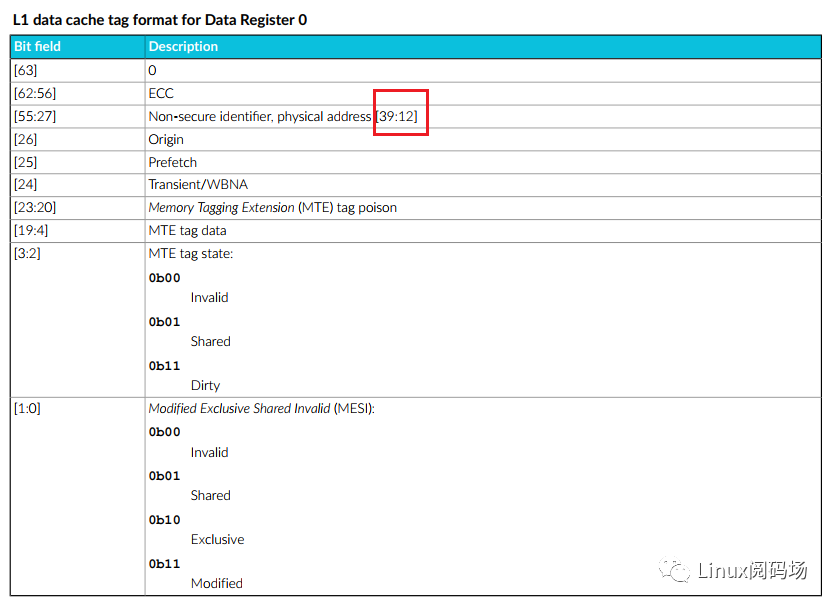
细心的同学可以发现,这里就有了一个很大的问题,你用于cache look-up的index是vaddr[15:6], 如果granue size是4KB,那么vaddr[11:0] = paddrr[11:0] , 但是vaddr[15:12]比特并不等于paddrr[15:12] ,那么你这样的index查询的cache有效吗?会不会发生同名、歧义 ?
其实大可不必担心,因为对于每个core,L1是VIPT的,其实它们的L1 Cache TAG中,已经规定了physical address[39:12],正好是到BIT12。所以只要TAG比较之后,就不会出现同名和歧义。
连载文章第一篇:深入学习Cache系列 1: 带着几个疑问,从Cache的应用场景学起
如有兴趣与作者进一步沟通交流,可扫描下方二维码进群

